4 Robotics: Perception 课程学习记录及课后习题解答
4 Robotics: Perception 第1+2周 学习记录及课后习题解答
- WEEK 1
- Introduction
- Vanishing Points
- Perspective Projection
- Rotations and Translations
- Dolly Zoom
- Feeling of Camera Motion
- How to Compute Intrinsics from Vanishing Points
- Camera Calibration
- WEEK 2
- Homogeneous Coordinates
- Projective Transformations
- Vanishing Points
- Cross Ratios and Single View Metrology
- WEEK 3
- Visual Features
- Singular Value Decomposition
- RANSAC
- 3D-3D Pose
- Pose Estimation
- WEEK 4
- Epipolar Geometry
- Nonlinear Least Squares
- 3D Velocities from Optical Flow
- Bundle Adjustment
首先这个系列的第一个单元是空中机器人,博客如下:
1 Robotics: Aerial Robotics 第1+2周 课程学习记录及课后习题解答
1 Robotics: Aerial Robotics 第3+4周 课程学习记录及课后习题解答
2 Robotics: Computational Motion Planning 第1周(内含Dijkstra 和 A* MATLAB代码手把手教学)课后习题解答
2 Robotics: Computational Motion Planning 第2+3+4周 课后习题解答
3 Robotics: Mobility 课程学习记录及课后习题解答
此课程在Coursera需要科学上网才能观看,放一下B站和Coursera的课程链接
- UP主 博主自己做的字幕版本 这个单元… 只有英文(持续更新)
- Coursera的链接介绍
此文仅为听课记录以及做题思考,有所错误的地方或是好的想法欢迎评论区交流。(点个赞就更好了,鼓励一下~)
- 9.6:其实3月份一起的时候就做了这章,但是真心觉得这个单元讲的不是特别易懂,如果是视觉那边建议听一下吴恩达的Deep Learning的系列(无基础都可入门 而且可以看很多遍去想——PS线性代数很重要,理解本质的那种,可以看看3Blue1Brown B站的线性代数的本质 刷新一下认识)
所以这个单元我也没怎么认真听,做题只是为了做题过,所以很多都是组合的,如果打了X在后面那边证明这种组合是不正确的… 有认真听的同学可以在评论区留下正确答案给大家参考
WEEK 1
Introduction
1.In the equation , what does the stands for:
Focal Length
解释:
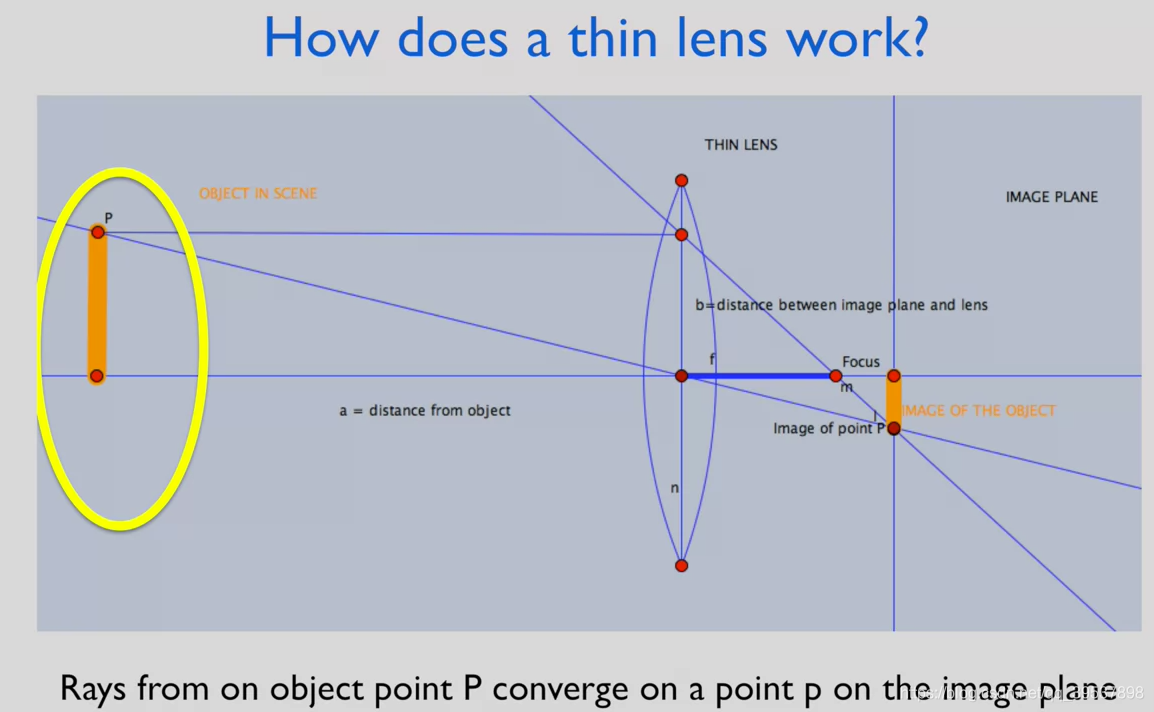
2.If an object is originally in focus and then you start moving the image plane, what do you expect to happen:
Image starts blurring
3.The size of the projection of an object increases as the object distance from the lens increases.
False
4.Parallel lines in the world remain always parallel after projection.
False
5.Parallel lines in the world remain parallel in the image plane when
the lines are parallel to the image plane
6.A vanishing point in an image is the intersection of projections of parallel lines in the world. There is at most one vanishing point in an image
False
7.The two parameters that we can directly control using the bi-perspectograph construction are:
Height of the camera
Focal Length
Vanishing Points
1.The School of Athens is a famous fresco by Raphael. Correct perspective projection is visible here. From the three specified points (A, B, or C), which is the vanishing point? (You need to use a ruler)
C
2.From the three options , which is the horizon?
3.In the following image, from the three options , which is the horizon?
4.A vanishing point is always visible inside an image
False
5.The horizon is the set of all directions to infinity for a plane
True
Perspective Projection
1.Assume you are given a line represented in the form . Which set of parameters (\rho,\theta)(ρ,θ) gives the same line represented in the form :
2.The distance of a line to the origin is and the norm direction of the line is . Which of the following is/are valid equations for the line?
3.What is the equation of the line passing through points with homogeneous coordinates and ?
4.The lines and instersect at the point with homogeneous coordinates:
5.Consider the lines and in 2D projective space (as previous questions). What is the point of intersection in homogeneous coordinates?
They do not intersect
Rotations and Translations
这一章节建议去看一下b站的3blue1brown的线性代数章节,(比原来课程讲得好多了… 几下就能理解)
1.What is the determinant of a rotation matrix?
+1
2.What is the rotation such that for a point expressed in the world coordinate frame?
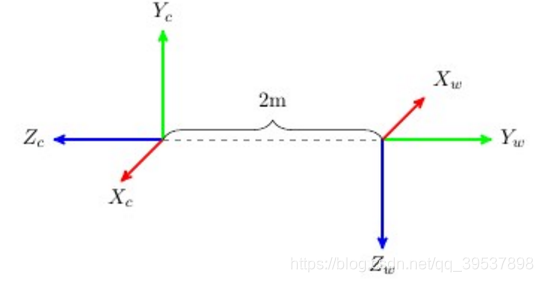
=(-1 0 0;0 0 -1;0 -1 0)
解释(如果看完3blue1brown 就能理解更多 -> 线性代数的本质):如果w是单元系,也就是用w表示c,我们看和那么第一列就是(-1 0 0)因为是,好,看一下怎么表示,我们看到对应w的而且,还有个负号,所以第二列为(0 0 -1),以此类推
3.What is the corresponding translation ?
4.What is ?
5.What is ?
6.For the quadrotor configuration in the two images below (top view and side view), what is the transformation from the body (imu) coordinate system to the camera?
In particular, what is the rotation
such that for a point expressed in the body coordinate frame?
[Top View] (Distance between origins on XY plane is 4cm)
x=根号2/2
(x -x 0;-x -x 0;0 0 -1)
7.What is the corresponding translation ?
(-0.04,0,-0.03)
Dolly Zoom
1.Given Image 1, which of the four other images (2-5) would be the final result if we reduce the focal length?
Image 5
2.For the five images above, for which one do you think that the camera is the farthest away from the scene?
Image 3
Feeling of Camera Motion
1.You are given two images of a scene, before and after a change in the camera. Which transformation can produce this result?
Movement of the camera on the horizontal axis
2.You are given two images of a scene, before and after a change in the camera. Which transformation can produce this result?
Movement of the camera on the vertical axis
3.You are given two images of a scene, before and after a change in the camera. Which transformation can produce this result?
Rotation of the camera around the z-aixs
How to Compute Intrinsics from Vanishing Points
1.In the image below, we can see the projections of three orthogonal vanishing points and the image center CC. Which of the following statements is always true?
The image center is the centroid of the triangle formed by the projections of three orthogonal vanishing points.
2.Assume that the image center has been computed using the result of the previous question. Then, under which conditions can we compute the focal length from the image projections of three orthogonal vanishing points?
At least two of the vanishing points are not at infinity.
Camera Calibration
1.The calibration procedure estimates:
All the above
2.Which two of the four images below suffer mostly from radial distortion effects?
A
D
3.For calibration you need to know the size of the checkerboard squares
True
WEEK 2
Homogeneous Coordinates
1.The homogeneous coordinates of a point are . Which of the following (homogeneous) coordinates represent the same point?
(2,4,2)
(-0.5,-1,-0.5)
2.Given a square ABCD, with and , the equation of the diagonal BD in has the form with equal to
Clarification: For this and following questions, we use P2 to denote the real projective plane.
(-1,-1,1)
3.Determine the equation of the line in through the points and .
-b -a ab
4.Determine the equation of the line in P2 through the points and .
-ce cd ae-bd X
5.0 0 ae-bd
Projective Transformations
1.What is the least number of non-collinear points required to estimate a projective transformation ?
4
2.A projective transformation preserves the points , and the origin of the coordinate system. However, it maps the point to the points meaning . Compute MM.
3.Find the projective transformation which will keep the points and fixed and will map point to and point to ?
4.Find the projective transformation AA that maps the points , , , and to the points and , respectively.
Vanishing Points
1.When the camera is zooming, do the vanishing points move?
Yes
2.What camera change would give the following result from Image 1 to Image 2
(Hint: Notice how the vanishing points change)
Camera Translation
3.What camera change would give the following result from Image 1 to Image 2
(Hint: Notice if the vanishing points change)
Zooming
4.z
h-b+bh 3,3 = bh
Cross Ratios and Single View Metrology
1.For the image below, if AB=12, BC=4 and CD=8, what is the cross ratio CR(A,B,C,D)?
2
2.For the same image as the previous question, if
1.91
3.Is it possible that the image of A’B’C’D’is the result of a perspective projection from ABCD? (assume that the lengths are the same as those from the previous two questions)
No
4.If not, what should be the length A’B’, such that A’B’C’D’ is indeed the result of a perspective projection from ABCD
6
WEEK 3
Visual Features
1.Features can be useful for
Panorama stitching
Scene reconstruction
Image retrieval
Image based localization
2.What properties of features are desirable?
X Detection variance
Descriptor invariance
91.3 Detection invariance
Descriptor variance
83.3 Detection variance
Descriptor variance
3.A scale space of an image can be build by
convolving with gaussian filters and subsampling
4.The scale of a feature is chosen by first convolving the corresponding image patch with Difference-of-Gaussian (DoG) filters and then, by taking the maximum response over all scales.
True
5.The SIFT detector is
Scale and rotation invariant
6.To compute the SIFT descriptor
You compute a histogram of gradients in a 16 by 16 grid and rotate them to have the largest magnitude gradient oriented upwards
Singular Value Decomposition
1.If is an SVD for a given matrix AA then which if the following statements are true?
U is orthogonal and Σ is diagonal
U and V are orthogonal matrices
2.A symmetric real matrix has real eigenvalues and real singular values. Which of the following is true?
All singular values are nonnegative
Singular values are equal to the eigenvalues X
All eigenvalues are nonnegative
Singular values are equal to the eigenvalues X
All singular values are nonnegative
All eigenvalues are nonnegative X
就是这上面的组合都是错的… 因为没时间了
3.The largest singular value of is
2
4.Which of the following are valid SVD’s of the form for the matrix
U=-1
U=1;-1;-1
5.Find the rank of the matrix
4
6.Which of the following is true?
The rank of a matrix is equal to the number of nonzero singular values.
7.The minimizer of the fitting cost with , rank(A)>n subject to
The rank of matrix has nothing to do with its singular values.
8.Consider the points (0,-0.8), (1,0), (2.2,0.9), (2.9,2.1). Which of the following lines best fits the given points?
RANSAC
1.Assume we have a case for RANSAC with 300 samples and 200 inliers. If we pick samples to build our model, what is the probability that we will build the correct model? (Use 3 decimals of precision)
0.017
解释:(2/3)^10
2.For the same description, what is the probability that we won’t build a correct model after iterations? (Use 3 decimals of precision)
0.174
解释:(1-(2/3)10)100
3.How many iterations will we need at least, in case the desired RANSAC success rate is p≥0.99?
264
解释:log(0.01)/log(1-(2/3)^10)
3D-3D Pose
1.Find the rotation matrix RR such that is minimized, where
,
2-0.8941
Pose Estimation
1.What is the minimum number of point correspondences required for camera pose estimation given the perspective projections of points with known world coordinates?
3
2.What is the maximum number of solutions obtained from solving the P3P?
4
3.Assume that all points in the world lie on the plane
K(r1 r2 T)
4.Assume that all points in the world lie on the plane
K(r1 r3 T)
WEEK 4
Epipolar Geometry
1.Let
X
x2.T T x1=0
x2.T R x1=0
X
x2.T T x1=0
x2.T x1=0
X
x2.T T x1=0
x2.T T R x1=0
X
x2.T x1=0
x2.T T R x1=0
X
x2.T R x1=0
x2.T T R x1=0
X
x2.T x1=0
x2.T R x1=0
2.is a rotation matrix, which of the following properties hold?
X
u.T u=0.T
R.t u R =R.T u
X
u.T u=0.T
uu=0
X
u.T u=0.T
u.T=-u
X
u.T=-u
uu=0
X
u.T=-u
R.t u R =R.T u
X
uu=0
R.t u R =R.T u
3.Let two cameras with poses
X
E=R1.T T21 R12
E=R1.T T12 R2
X
E=R1.T T21 R12
E=R1.T T12 R12
X
E=R1.T T21 R12
E=R1.T T21 R2
X
E=R1.T T12 R2
E=R1.T T21 R2
X
E=R1.T T21 R2
E=R1.T T12 R12
X
E=R1.T T12 R2
E=R1.T T12 R12
4.The relative pose between two views is where and corresponds to a translation of 11m in the direction of the z-axis, which of the following is a valid essential matrix? Hint: use the fact that E=TˆR.
0 -1 0;1 0 0;0 0 0
5.The relative pose between two
6.A nonzero matrix
sigma sigma 0 >
7.Given
sigma sigma 0 12/2
8.How many point correspondences are required to obtain an essential matrix using the linear algorithm?
8
9.Which of the following are valid essential matrices?
0 0 0;x 0 -x;0 1 0
1 1 0
10.Suppose we know the camera motion always moves on a plane, say the XY- plane (i.e. translation with only x and y components and rotation only about the z-axis). The essential matrix E=TˆR has the special form
0 0 a
11.Now, assuming the same scenario as in the previous question, which of the following solutions for
12.In general, given a normalized essential matrix, we get mm distinct poses and by enforcing the positive depth constraint, we end up with nn valid poses. Which of the following is true?
Nonlinear Least Squares
1.Which of the following cost functions can be minimized in the framework of linear least squares? (Note the underscore on the norm refers to the p-norm)
2.Consider the problem of minimizing , where the rank of is larger than the dimension of . Which of the following corresponds to the optimality condition?
3.Minimizing is prone, in general, to the existence of local minima.
True
4.Examples of nonlinear least squares problems include
Triangulation
Perspective-n-Point
5.Assume we want to minimize . Then, the (globally) optimal solution satisfies
f(x)=b
6.If a point satisfies the condition of the previous question then it is globally optimal.
False
3D Velocities from Optical Flow
1.The equation of optical flow given in Lecture is:
Heading Direction
2.What was the constraint
X N
X I-J
B
3.In trying to minimize
Taylor
The second
Iterating
Bundle Adjustment
1.Bundle adjustment corresponds to minimization of
Reprojection Error
2.Bundle adjustment corresponds to optimization of a cost function with respect to
All of above
3.Assume that we want to minimize
b-f(x)
4.Which of the following tools are useful in a visual odometry framework
Bundle adjustment over sliding window
Key frame selection
Visual
5.Select any answer that is an indispensable part of a structure from motion pipeline.
B
P
E
O
OBI
OOI
如若内容造成侵权/违法违规/事实不符,请联系编程学习网邮箱:809451989@qq.com进行投诉反馈,一经查实,立即删除!
相关文章
- idea编译spring源码
以下源码编译过程是本人按照官方文档实操,并结合国情对一些下载源修改为国内源,如果你是新手建议每一步都安装本教程操作,确保不会出现一些奇葩问题下载spring源码建议去码云下载,github下载会比较慢,地址:https://gitee.com/mirrors/Spring-Framework,建议下载标签中的…...
2024/3/9 22:26:38 - 社交产品
文章目录1、什么是社交产品2、难做的社交产品3、如何做需求分析4、如何做竞品分析5、如何做用户增长6、产品设计漫谈 1、什么是社交产品 社区产品VS社交产品类别 内容社交产品 基于人纬度聚合是社交产品社区产品 基于内容纬度聚合的是社区产品社交网络 社交媒体 社区微信 微博 …...
2024/3/28 8:22:22 - 【LCT】[NOI2014]魔法森林
题目思路 最大值最小?还跟路径有关?当然是维护最小生成树啦 只有一个值很简单:暴力加边并查集判断连通性,当1,n第一次连通的时候答案一定是最小的 可是现在有两个值怎么办呢 考虑按a排序,维护以b为关键字的最小生成树,答案就是1,n路径上最大值+当前的a 然而b是无序的,…...
2024/3/10 1:58:28 - Spring Cloud Alibaba 限流与熔断 — 再谈Sentinel 限流与熔断
前面我们已经介绍了Sentinel的限流的简单使用,今天我们再次讲解Sentinel的限流与熔断的使用,并且介绍几种常见的限流的算法。 所谓限流就是通过限制并发访问数或者限制一个时间窗口内允许的请求数量来保护系统,一旦请求超过限制数量而采取一些处理策略,比如:跳转到错误页…...
2024/3/10 5:18:03 - 网站favicon图标
favicon.ico一般用于作为缩略的网站标志,它显示在浏览器的地址栏或者标签上,目前主要的浏览器都支持favicon.ico图标 一、制作favicon图标把图片切成png图片; 把png图片转换为ico图标,这需要借助于第三方转换网站,例如比特虫:http://www.bitbug.net/二、favicon图标放到网…...
2024/3/10 5:13:04 - U2NET人物肖像画模拟
论文:U^2-Net: Going Deeper with Nested U-Structure for Salient Object Detection - 2020作者:Xuebin Qin, Zichen Zhang, Chenyang Huang, Masood Dehghan, Osmar R.Zaiane, MartinJagersand团队:University of Alberta, Edmonton, CanadaGithub - U-2-NetU2NET其实…...
2024/4/20 17:27:38 - dp/模拟(石油大学组队赛 A Famous Equation / HDU-4249)
题目链接 题意: 给你一个等式,里面只有一个+号和一个=号,有些数位被隐藏为?号,不允许前导零。问:有有多少种方案让等式成立。 题解: 一个模拟加+dp,我们记dp[i][2]为三个数考虑到第i位,这一位有没有进1的方案数。按照三个数的情况分类讨论。我们可以对每一位?的最小取…...
2024/3/10 3:46:00 - React中使用localIdentName来自定义模块化类名
首先看下未配置localIdentName的环境下,系统自动生成的类名是随机的字符串,如下图所示:这样杂乱无章的类名并不能从中获取到一些信息,因此我们可以借助localIdentName来自定义生成类名的样式规则,来看一下该属性为我们提供的参数:接下来开始配置,在webpack.config.js里面…...
2024/4/27 4:22:00 - [Quartus II][14.1正式版]
----14.1版本最大的变化就是增加了2大系列的器件库: MAX 10和Arria 10。 这2大系列据Altera中国区代理 骏龙科技的人说,就是为了和Xilinx打价格战的,其中MAX 10系列结构与性能和Cyclone IV差不多,价格更低,而且可以加密,集成了2个配置器件,Cyclone V系列是Cyclone最后一…...
2024/3/12 5:45:54 - Leetcode 09/06 每日一题 (107. 二叉树的层次遍历 II)
给定一个二叉树,返回其节点值自底向上的层次遍历。 (即按从叶子节点所在层到根节点所在的层,逐层从左向右遍历) 例如: 给定二叉树 [3,9,20,null,null,15,7],3 / \9 20/ \15 7返回其自底向上的层次遍历为:[ [15,7], [9,20],[3] ]idea: 广度优先搜索 从根节点开始,每次…...
2024/3/12 1:40:03 - C#面向对象思想
...
2024/3/21 6:57:08 - Python+Stata:批量制作个性化结业证书
原文链接: https://www.lianxh.cn/news/1164f7ad9b4cc.html 👈🍎 连享会 推文 || 视频1. 需求 事情缘起:半个月前,接到老师的一项任务,能否批量生成连享会的结业证书。 结业证书的模版是这样的。简单观察能够发现共需要填写 7 个空格,分别是姓名、单位、月份1、…...
2024/4/25 6:06:47 - model builder 批量裁剪
...
2024/3/28 0:54:45 - 古代密码学破解方式-频率分析法
古代密码学破解方式-频率分析法...
2024/4/25 5:37:14 - 百度2017敏感字符串
例如当敏感词是gre,eat 是Your English is Great.将被和谐成Your English is *****.请编程,输入给定的文本和关键字,将所有被和谐的部分都打上星号 (*)#include <iostream> #include <string> #include<vector>using namespace std; //void reverse(strin…...
2024/4/23 16:32:11 - Gluster集群管理小分析
开源分布式文件系统GlusterFS的集群管理系统GlusterD设计复杂,然而剖析其内部原理的参考文献极少,如果不熟悉源码,遇到问题解决难度比较大。本文的小目标是对GlusterD进行架构设计及代码层面的简析,深入了解GlusterD机制,从而帮助技术人员提高定位和解决问题的效率。1 Glu…...
2024/4/23 21:10:25 - 在vue-cli实现电子签名
在vue-cli中使用该插件 我们先安装组件 npm i elesigncode首先下载版本大于1.0.9的版本 下载好版本过后我们来创建一个组件 在组件中使用的详细流程 <template><div><div>在vue-cli中使用elesigncode</div><div class="hello" ><El…...
2024/5/8 18:41:43 - 2021考研人必须要了解的30个考研知识点汇总!
2021考研人必须要了解的30个考研知识点汇总! 一、考研分哪些阶段? 1.准备阶段:2020年3月中旬前 搜集考研资料,确定考研目标院校和专业。 2.基础阶段:2020年3月中旬-2020年6月 第一轮复习,注重基础,重点复习英语和数学、专业课。政治可以在马原这门学科多积累。 3.强化阶…...
2024/5/9 2:42:51 - 阿里天池 NLP 入门赛 Bert 方案 -1 数据预处理
前言 这篇文章用于记录阿里天池 NLP 入门赛,详细讲解了整个数据处理流程,以及如何从零构建一个模型,适合新手入门。 赛题以新闻数据为赛题数据,数据集报名后可见并可下载。赛题数据为新闻文本,并按照字符级别进行匿名处理。整合划分出 14 个候选分类类别:财经、彩票、房产…...
2024/3/12 5:21:55 - 【同程艺龙】一年Java开发经验面经(部门老大面)
公司:同程艺龙成都BU 现场部门老大面 同程艺龙电话一面面经 之前的同程艺龙电话一面过了,然后通知到同程艺龙成都办公地点现场进行部门老大面,面经如下:你在项目中学习到了哪些?或者是遇到了哪些困难?怎么解决的? 如何保证你的调用链路的稳定性?如何保证服务调用链路请…...
2024/3/12 1:26:46
最新文章
- FPGA -手写异步FIFO
一,FIFO原理 FIFO(First In First Out)是一种先进先出的数据缓存器,没有外部读写地址线,使用起来非常简单,只能顺序写入数据,顺序的读出数据,其数据地址由内部读写指针自动加1完成&a…...
2024/5/9 9:13:52 - 梯度消失和梯度爆炸的一些处理方法
在这里是记录一下梯度消失或梯度爆炸的一些处理技巧。全当学习总结了如有错误还请留言,在此感激不尽。 权重和梯度的更新公式如下: w w − η ⋅ ∇ w w w - \eta \cdot \nabla w ww−η⋅∇w 个人通俗的理解梯度消失就是网络模型在反向求导的时候出…...
2024/5/7 10:36:02 - WPS二次开发专题:如何获取应用签名SHA256值
作者持续关注WPS二次开发专题系列,持续为大家带来更多有价值的WPS开发技术细节,如果能够帮助到您,请帮忙来个一键三连,更多问题请联系我(QQ:250325397) 在申请WPS SDK授权版时候需要开发者提供应用包名和签…...
2024/5/8 22:08:17 - 产品推荐 | 中科亿海微推出亿迅®A8000金融FPGA加速卡
01、产品概述 亿迅A8000金融加速卡,是中科亿海微联合金融证券领域的战略合作伙伴北京睿智融科,将可编程逻辑芯片与金融行业深度结合,通过可编程逻辑芯片对交易行情加速解码,实现低至纳秒级的解码引擎,端到端的处理时延…...
2024/5/9 3:34:56 - 416. 分割等和子集问题(动态规划)
题目 题解 class Solution:def canPartition(self, nums: List[int]) -> bool:# badcaseif not nums:return True# 不能被2整除if sum(nums) % 2 ! 0:return False# 状态定义:dp[i][j]表示当背包容量为j,用前i个物品是否正好可以将背包填满ÿ…...
2024/5/8 19:32:33 - 【Java】ExcelWriter自适应宽度工具类(支持中文)
工具类 import org.apache.poi.ss.usermodel.Cell; import org.apache.poi.ss.usermodel.CellType; import org.apache.poi.ss.usermodel.Row; import org.apache.poi.ss.usermodel.Sheet;/*** Excel工具类** author xiaoming* date 2023/11/17 10:40*/ public class ExcelUti…...
2024/5/9 7:40:42 - Spring cloud负载均衡@LoadBalanced LoadBalancerClient
LoadBalance vs Ribbon 由于Spring cloud2020之后移除了Ribbon,直接使用Spring Cloud LoadBalancer作为客户端负载均衡组件,我们讨论Spring负载均衡以Spring Cloud2020之后版本为主,学习Spring Cloud LoadBalance,暂不讨论Ribbon…...
2024/5/9 2:44:26 - TSINGSEE青犀AI智能分析+视频监控工业园区周界安全防范方案
一、背景需求分析 在工业产业园、化工园或生产制造园区中,周界防范意义重大,对园区的安全起到重要的作用。常规的安防方式是采用人员巡查,人力投入成本大而且效率低。周界一旦被破坏或入侵,会影响园区人员和资产安全,…...
2024/5/8 20:33:13 - VB.net WebBrowser网页元素抓取分析方法
在用WebBrowser编程实现网页操作自动化时,常要分析网页Html,例如网页在加载数据时,常会显示“系统处理中,请稍候..”,我们需要在数据加载完成后才能继续下一步操作,如何抓取这个信息的网页html元素变化&…...
2024/5/9 3:15:57 - 【Objective-C】Objective-C汇总
方法定义 参考:https://www.yiibai.com/objective_c/objective_c_functions.html Objective-C编程语言中方法定义的一般形式如下 - (return_type) method_name:( argumentType1 )argumentName1 joiningArgument2:( argumentType2 )argumentName2 ... joiningArgu…...
2024/5/9 5:40:03 - 【洛谷算法题】P5713-洛谷团队系统【入门2分支结构】
👨💻博客主页:花无缺 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅! 本文由 花无缺 原创 收录于专栏 【洛谷算法题】 文章目录 【洛谷算法题】P5713-洛谷团队系统【入门2分支结构】🌏题目描述🌏输入格…...
2024/5/9 7:40:40 - 【ES6.0】- 扩展运算符(...)
【ES6.0】- 扩展运算符... 文章目录 【ES6.0】- 扩展运算符...一、概述二、拷贝数组对象三、合并操作四、参数传递五、数组去重六、字符串转字符数组七、NodeList转数组八、解构变量九、打印日志十、总结 一、概述 **扩展运算符(...)**允许一个表达式在期望多个参数࿰…...
2024/5/8 20:58:56 - 摩根看好的前智能硬件头部品牌双11交易数据极度异常!——是模式创新还是饮鸩止渴?
文 | 螳螂观察 作者 | 李燃 双11狂欢已落下帷幕,各大品牌纷纷晒出优异的成绩单,摩根士丹利投资的智能硬件头部品牌凯迪仕也不例外。然而有爆料称,在自媒体平台发布霸榜各大榜单喜讯的凯迪仕智能锁,多个平台数据都表现出极度异常…...
2024/5/9 1:35:21 - Go语言常用命令详解(二)
文章目录 前言常用命令go bug示例参数说明 go doc示例参数说明 go env示例 go fix示例 go fmt示例 go generate示例 总结写在最后 前言 接着上一篇继续介绍Go语言的常用命令 常用命令 以下是一些常用的Go命令,这些命令可以帮助您在Go开发中进行编译、测试、运行和…...
2024/5/9 4:12:16 - 用欧拉路径判断图同构推出reverse合法性:1116T4
http://cplusoj.com/d/senior/p/SS231116D 假设我们要把 a a a 变成 b b b,我们在 a i a_i ai 和 a i 1 a_{i1} ai1 之间连边, b b b 同理,则 a a a 能变成 b b b 的充要条件是两图 A , B A,B A,B 同构。 必要性显然࿰…...
2024/5/9 7:40:35 - 【NGINX--1】基础知识
1、在 Debian/Ubuntu 上安装 NGINX 在 Debian 或 Ubuntu 机器上安装 NGINX 开源版。 更新已配置源的软件包信息,并安装一些有助于配置官方 NGINX 软件包仓库的软件包: apt-get update apt install -y curl gnupg2 ca-certificates lsb-release debian-…...
2024/5/8 18:06:50 - Hive默认分割符、存储格式与数据压缩
目录 1、Hive默认分割符2、Hive存储格式3、Hive数据压缩 1、Hive默认分割符 Hive创建表时指定的行受限(ROW FORMAT)配置标准HQL为: ... ROW FORMAT DELIMITED FIELDS TERMINATED BY \u0001 COLLECTION ITEMS TERMINATED BY , MAP KEYS TERMI…...
2024/5/9 7:40:34 - 【论文阅读】MAG:一种用于航天器遥测数据中有效异常检测的新方法
文章目录 摘要1 引言2 问题描述3 拟议框架4 所提出方法的细节A.数据预处理B.变量相关分析C.MAG模型D.异常分数 5 实验A.数据集和性能指标B.实验设置与平台C.结果和比较 6 结论 摘要 异常检测是保证航天器稳定性的关键。在航天器运行过程中,传感器和控制器产生大量周…...
2024/5/9 1:42:21 - --max-old-space-size=8192报错
vue项目运行时,如果经常运行慢,崩溃停止服务,报如下错误 FATAL ERROR: CALL_AND_RETRY_LAST Allocation failed - JavaScript heap out of memory 因为在 Node 中,通过JavaScript使用内存时只能使用部分内存(64位系统&…...
2024/5/9 5:02:59 - 基于深度学习的恶意软件检测
恶意软件是指恶意软件犯罪者用来感染个人计算机或整个组织的网络的软件。 它利用目标系统漏洞,例如可以被劫持的合法软件(例如浏览器或 Web 应用程序插件)中的错误。 恶意软件渗透可能会造成灾难性的后果,包括数据被盗、勒索或网…...
2024/5/9 4:31:45 - JS原型对象prototype
让我简单的为大家介绍一下原型对象prototype吧! 使用原型实现方法共享 1.构造函数通过原型分配的函数是所有对象所 共享的。 2.JavaScript 规定,每一个构造函数都有一个 prototype 属性,指向另一个对象,所以我们也称为原型对象…...
2024/5/8 12:44:41 - C++中只能有一个实例的单例类
C中只能有一个实例的单例类 前面讨论的 President 类很不错,但存在一个缺陷:无法禁止通过实例化多个对象来创建多名总统: President One, Two, Three; 由于复制构造函数是私有的,其中每个对象都是不可复制的,但您的目…...
2024/5/8 9:51:44 - python django 小程序图书借阅源码
开发工具: PyCharm,mysql5.7,微信开发者工具 技术说明: python django html 小程序 功能介绍: 用户端: 登录注册(含授权登录) 首页显示搜索图书,轮播图࿰…...
2024/5/9 6:36:49 - 电子学会C/C++编程等级考试2022年03月(一级)真题解析
C/C++等级考试(1~8级)全部真题・点这里 第1题:双精度浮点数的输入输出 输入一个双精度浮点数,保留8位小数,输出这个浮点数。 时间限制:1000 内存限制:65536输入 只有一行,一个双精度浮点数。输出 一行,保留8位小数的浮点数。样例输入 3.1415926535798932样例输出 3.1…...
2024/5/9 4:33:29 - 配置失败还原请勿关闭计算机,电脑开机屏幕上面显示,配置失败还原更改 请勿关闭计算机 开不了机 这个问题怎么办...
解析如下:1、长按电脑电源键直至关机,然后再按一次电源健重启电脑,按F8健进入安全模式2、安全模式下进入Windows系统桌面后,按住“winR”打开运行窗口,输入“services.msc”打开服务设置3、在服务界面,选中…...
2022/11/19 21:17:18 - 错误使用 reshape要执行 RESHAPE,请勿更改元素数目。
%读入6幅图像(每一幅图像的大小是564*564) f1 imread(WashingtonDC_Band1_564.tif); subplot(3,2,1),imshow(f1); f2 imread(WashingtonDC_Band2_564.tif); subplot(3,2,2),imshow(f2); f3 imread(WashingtonDC_Band3_564.tif); subplot(3,2,3),imsho…...
2022/11/19 21:17:16 - 配置 已完成 请勿关闭计算机,win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机...
win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机”问题的解决方法在win7系统关机时如果有升级系统的或者其他需要会直接进入一个 等待界面,在等待界面中我们需要等待操作结束才能关机,虽然这比较麻烦,但是对系统进行配置和升级…...
2022/11/19 21:17:15 - 台式电脑显示配置100%请勿关闭计算机,“准备配置windows 请勿关闭计算机”的解决方法...
有不少用户在重装Win7系统或更新系统后会遇到“准备配置windows,请勿关闭计算机”的提示,要过很久才能进入系统,有的用户甚至几个小时也无法进入,下面就教大家这个问题的解决方法。第一种方法:我们首先在左下角的“开始…...
2022/11/19 21:17:14 - win7 正在配置 请勿关闭计算机,怎么办Win7开机显示正在配置Windows Update请勿关机...
置信有很多用户都跟小编一样遇到过这样的问题,电脑时发现开机屏幕显现“正在配置Windows Update,请勿关机”(如下图所示),而且还需求等大约5分钟才干进入系统。这是怎样回事呢?一切都是正常操作的,为什么开时机呈现“正…...
2022/11/19 21:17:13 - 准备配置windows 请勿关闭计算机 蓝屏,Win7开机总是出现提示“配置Windows请勿关机”...
Win7系统开机启动时总是出现“配置Windows请勿关机”的提示,没过几秒后电脑自动重启,每次开机都这样无法进入系统,此时碰到这种现象的用户就可以使用以下5种方法解决问题。方法一:开机按下F8,在出现的Windows高级启动选…...
2022/11/19 21:17:12 - 准备windows请勿关闭计算机要多久,windows10系统提示正在准备windows请勿关闭计算机怎么办...
有不少windows10系统用户反映说碰到这样一个情况,就是电脑提示正在准备windows请勿关闭计算机,碰到这样的问题该怎么解决呢,现在小编就给大家分享一下windows10系统提示正在准备windows请勿关闭计算机的具体第一种方法:1、2、依次…...
2022/11/19 21:17:11 - 配置 已完成 请勿关闭计算机,win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机”的解决方法...
今天和大家分享一下win7系统重装了Win7旗舰版系统后,每次关机的时候桌面上都会显示一个“配置Windows Update的界面,提示请勿关闭计算机”,每次停留好几分钟才能正常关机,导致什么情况引起的呢?出现配置Windows Update…...
2022/11/19 21:17:10 - 电脑桌面一直是清理请关闭计算机,windows7一直卡在清理 请勿关闭计算机-win7清理请勿关机,win7配置更新35%不动...
只能是等着,别无他法。说是卡着如果你看硬盘灯应该在读写。如果从 Win 10 无法正常回滚,只能是考虑备份数据后重装系统了。解决来方案一:管理员运行cmd:net stop WuAuServcd %windir%ren SoftwareDistribution SDoldnet start WuA…...
2022/11/19 21:17:09 - 计算机配置更新不起,电脑提示“配置Windows Update请勿关闭计算机”怎么办?
原标题:电脑提示“配置Windows Update请勿关闭计算机”怎么办?win7系统中在开机与关闭的时候总是显示“配置windows update请勿关闭计算机”相信有不少朋友都曾遇到过一次两次还能忍但经常遇到就叫人感到心烦了遇到这种问题怎么办呢?一般的方…...
2022/11/19 21:17:08 - 计算机正在配置无法关机,关机提示 windows7 正在配置windows 请勿关闭计算机 ,然后等了一晚上也没有关掉。现在电脑无法正常关机...
关机提示 windows7 正在配置windows 请勿关闭计算机 ,然后等了一晚上也没有关掉。现在电脑无法正常关机以下文字资料是由(历史新知网www.lishixinzhi.com)小编为大家搜集整理后发布的内容,让我们赶快一起来看一下吧!关机提示 windows7 正在配…...
2022/11/19 21:17:05 - 钉钉提示请勿通过开发者调试模式_钉钉请勿通过开发者调试模式是真的吗好不好用...
钉钉请勿通过开发者调试模式是真的吗好不好用 更新时间:2020-04-20 22:24:19 浏览次数:729次 区域: 南阳 > 卧龙 列举网提醒您:为保障您的权益,请不要提前支付任何费用! 虚拟位置外设器!!轨迹模拟&虚拟位置外设神器 专业用于:钉钉,外勤365,红圈通,企业微信和…...
2022/11/19 21:17:05 - 配置失败还原请勿关闭计算机怎么办,win7系统出现“配置windows update失败 还原更改 请勿关闭计算机”,长时间没反应,无法进入系统的解决方案...
前几天班里有位学生电脑(windows 7系统)出问题了,具体表现是开机时一直停留在“配置windows update失败 还原更改 请勿关闭计算机”这个界面,长时间没反应,无法进入系统。这个问题原来帮其他同学也解决过,网上搜了不少资料&#x…...
2022/11/19 21:17:04 - 一个电脑无法关闭计算机你应该怎么办,电脑显示“清理请勿关闭计算机”怎么办?...
本文为你提供了3个有效解决电脑显示“清理请勿关闭计算机”问题的方法,并在最后教给你1种保护系统安全的好方法,一起来看看!电脑出现“清理请勿关闭计算机”在Windows 7(SP1)和Windows Server 2008 R2 SP1中,添加了1个新功能在“磁…...
2022/11/19 21:17:03 - 请勿关闭计算机还原更改要多久,电脑显示:配置windows更新失败,正在还原更改,请勿关闭计算机怎么办...
许多用户在长期不使用电脑的时候,开启电脑发现电脑显示:配置windows更新失败,正在还原更改,请勿关闭计算机。。.这要怎么办呢?下面小编就带着大家一起看看吧!如果能够正常进入系统,建议您暂时移…...
2022/11/19 21:17:02 - 还原更改请勿关闭计算机 要多久,配置windows update失败 还原更改 请勿关闭计算机,电脑开机后一直显示以...
配置windows update失败 还原更改 请勿关闭计算机,电脑开机后一直显示以以下文字资料是由(历史新知网www.lishixinzhi.com)小编为大家搜集整理后发布的内容,让我们赶快一起来看一下吧!配置windows update失败 还原更改 请勿关闭计算机&#x…...
2022/11/19 21:17:01 - 电脑配置中请勿关闭计算机怎么办,准备配置windows请勿关闭计算机一直显示怎么办【图解】...
不知道大家有没有遇到过这样的一个问题,就是我们的win7系统在关机的时候,总是喜欢显示“准备配置windows,请勿关机”这样的一个页面,没有什么大碍,但是如果一直等着的话就要两个小时甚至更久都关不了机,非常…...
2022/11/19 21:17:00 - 正在准备配置请勿关闭计算机,正在准备配置windows请勿关闭计算机时间长了解决教程...
当电脑出现正在准备配置windows请勿关闭计算机时,一般是您正对windows进行升级,但是这个要是长时间没有反应,我们不能再傻等下去了。可能是电脑出了别的问题了,来看看教程的说法。正在准备配置windows请勿关闭计算机时间长了方法一…...
2022/11/19 21:16:59 - 配置失败还原请勿关闭计算机,配置Windows Update失败,还原更改请勿关闭计算机...
我们使用电脑的过程中有时会遇到这种情况,当我们打开电脑之后,发现一直停留在一个界面:“配置Windows Update失败,还原更改请勿关闭计算机”,等了许久还是无法进入系统。如果我们遇到此类问题应该如何解决呢࿰…...
2022/11/19 21:16:58 - 如何在iPhone上关闭“请勿打扰”
Apple’s “Do Not Disturb While Driving” is a potentially lifesaving iPhone feature, but it doesn’t always turn on automatically at the appropriate time. For example, you might be a passenger in a moving car, but your iPhone may think you’re the one dri…...
2022/11/19 21:16:57