论文翻译:C-box: A scalable and consistent TSDF-based dense mapping approach
摘要
维护一个一致性的环境稠密地图对于机器人进行高层次决策是重要的。然而,在长时空的建图过程中,累积漂移误差将导致地图不一致性。本文提出了一个新的稠密建图方法,解决建图一致性挑战的时候实现了可扩展性。我们方法的中心是将环境表示为一个TSDF子地图的集合。这些子地图通过基于特征的相机跟踪和BA优化进行定位。我们的主要贡献在于一个能够识别地图中稳定区域的pipeline,以及对子地图的融合。所提出的方法使得我们在降低地图增长的同时保持了一致性。我们在公共数据集上证明了我们方法的有效性。
引言
稀疏地图是目前主要SLAM方法所采取的地图形式,但是不适用于机器人任务执行。稠密建图能够提供任务执行所需要的环境信息但是受到漂移误差的影响,容易产生不一致的环境表达。
本文提出c-blox,一种新的建图方法能够使得地图具有一致性和可扩展性。本文将环境表示为相互重叠的TSDF子地图集合,对于每个子地图,限制其体素变形的程度,针对地图规模随着环境规模上升而增大的问题,通过子地图融合限制地图的增长。首先基于特征共视关系识别包含潜在冗余视角的子地图,然而判断这些候选子地图是否相比于另外一个具有准确的相对位置关系。这种certain measure是在同步构建的稀疏地图中提取得到的。
本文的贡献:
- 一种新的TSDF地图
- 基于CPU的建图方法
- the addition of threading infrastructure and an approximate fast intergrator to the open-source TSDF library Voxblox
相关工作
总的来说,目前的稠密建图方法在解决地图一致性问题上存在的挑战如下:(1) 所维护的地图的形式需要后续的进一步的处理,比如,点云地图和surfel地图,或者关键帧深度图;(2) 将新的信息融入到先前的地图中存在困难,例如mesh-based表达方法;(3) 在重建过程中的全局优化中使用离线或者计算代价较高的技术;(4) 构建的地图的尺寸增长没有界限,就算在限定的环境中也是如此。
本文的工作主要针对上述挑战,提出一种有效的解决方案。
系统框架
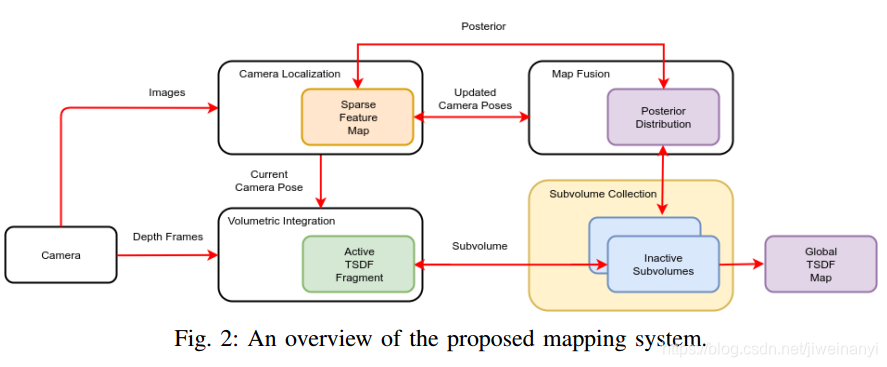
系统
在将观测数据融合到一个地图中的时候,传感器的定位误差会导致数据融合的不一致性。尤其在稠密地图中,这种误差很难被及时回复,因为观测和定位信息之间的关联通常丢失了,为了保证建图的效率。我们将环境表示为一个局部地图构成的集合,但是我们不对全局空间进行划分,使得地图和环境之间存在多对一的关系。保持环境结构的多假设对于维护地图一致性具有重要优势,使得能够在conflcit被消除之前维护独立的地图。
每个TSDF子地图对环境中的小部分区域进行表达,整个环境是这些子地图的集合。每个子地图有一个局部的坐标系。在子地图上三种操作包括:(1) 增加一个新的子地图;(2) 修正子地图的位姿;(3) 将一个子地图与另外一个子地图进行融合。
相机定位
本文使用稀疏的,基于特征的SLAM方法用来提供当前传感器的位姿,并对历史的位姿进行更新。传统的TSDF系统依赖于深度信息的注册进行相机跟踪,但是,在本文的方法中,基于稀疏特征的定位方法提供两个优势:现在的稀疏建图系统在CPU上能够高效运行,使得可以应用到轻量级的机器人系统中;(2) 一个稀疏特征地图能够保持定位信息和环境之间的关联关系,能够进行基于概率的决策。
本文使用ORB-SLAM2作为框架。
体素融合
新观测到的图像数据融合到子地图集合中。我们首先将估计的传感器位姿,变换到当前活动的子地图的坐标系中。
周期性的,一个新的子TSDF地图被创建,标记为active。最后一个active子地图被转移到集合中,使得地图增长。一个子地图与第一个关键帧是严格关联在一起的,二者的使用同一个坐标系。我们假设在一个子地图中的数据是一致的。Therefore our approach is to generate new subvolumes early and often, relying on the map fusion module to ameliorate the scalability cost of doing so. 我们选择创建一个新的子地图按照下述条件:属于一个子地图的关键帧的数量达到了最大值;或者稀疏特征地图中出现了较大的变化,导致在相机跟踪中产生了跳变。
地图融合
主要是基于闭环的校正。
两个子地图之间的融合

如若内容造成侵权/违法违规/事实不符,请联系编程学习网邮箱:809451989@qq.com进行投诉反馈,一经查实,立即删除!
相关文章
- [经验] 4K HDMI 接收发送 FMC子板(图像处理LVDS to HDMI 转换立体声双通道 )
4K HDMI 接收发送 FMC子板(图像处理LVDS to HDMI 转换立体声双通道 ) 4K HDMI FMC开发模块是明德扬公司自主研发的一款支持4K 60帧的HDMI 输入输出开发模块。该模块采用IT68051作为HDMI接收器,接收到的数据通过FMC接口与FPGA相连;采用LT2611UX作为HDMI发送器,通过FMC接口接…...
2024/4/25 11:45:25 - 悼念512汶川大地震遇难同胞——珍惜现在,感恩生活 hdu
悼念512汶川大地震遇难同胞——珍惜现在,感恩生活 Time Limit: 1000/1000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others) Total Submission(s): 41251 Accepted Submission(s): 17498 Problem Description 急!灾区的食物依然短缺! 为了挽救灾区同胞的生…...
2024/4/21 0:38:15 - MCU的技术原理、区别
摘自:http://bbs.21ic.com/icview-2886774-1-1.html 微控制单元(Microcontroller Unit;MCU) ,又称单片微型计算机(Single Chip Microcomputer )或者单片机,是把中央处理器(Central Process Unit;CPU)的频率与规格做适当缩减,并将内存(memory)、计数器(Timer)、…...
2024/4/18 23:04:11 - Pytorch_LSTM与GRU
RNN循环网络在序列问题处理中得到了广泛的应用。但使用标准版本的RNN模型时,常遇到梯度消失gradient vanishing和梯度爆炸gradient explosion问题。RNN的缺点RNN的梯度消失和梯度爆炸不同于其它网络,全连接网络和卷积网络每一层有不同参数,而RNN 的每个处理单元Cell(处理单…...
2024/4/24 22:10:37 - https对称非对称加密
对称加密主要的不安全性来源:要将密钥发送给对方时可能遭受信息盗窃混合加密并不会有信息被盗窃的风险,因为的对称密钥传递是用非对称加密,只有服务器的私钥能打开,而最后一步也没有传递对称密钥,因为客户端本身就有对称密钥,只需把“盒子”传递过来即可点赞收藏分享文章…...
2024/4/24 13:14:05 - (转)技术评审,你拿什么来吐槽?
现在,给你一个机会,来吐槽别人的方案或者代码,该从何开始?是不是觉得有千言万语想要迸发,弄到最后只想起个代码命名问题?如果你是java,你会想到《粑粑开发规范》,可那还是代码层面的。包括把sonar给上了,也是发现一些浅显的问题。现在的开发人员良莠不齐,为了将风险尽…...
2024/4/24 6:32:44 - [小白到大牛之路] 交换机后台管理之权限判断
项目需求 判断用户名和密码是否正确。 项目实现 #include <stdio.h>int main(void) {// 定义变量,用来表示用户名和密码//char name;char name[32];//int password;char password[16];// 输入用户名和密码printf("请输入用户名:");scanf("%s", nam…...
2024/4/26 0:33:15 - 左神算法基础class2——例子1荷兰国旗问题
左神算法基础class2——例子1荷兰国旗问题预备题目:给定一个数组arr,和一个数num,请把小于等于num的数放在数组的左边,大于num的数放在数组的右边。要求额外空间复杂度O(1),时间复杂度O(N)分析核心代码完整代码荷兰国旗问题:给定一个数组arr,和一个数num,请把小于num的…...
2024/4/26 23:11:26 - web前端基础知识整合(新手)
Vue 文章目录Vuejs基础对象闭包原型链继承es6(ES2015)对象扩展class模块化AxiosWebpack介绍配置使用Vue基础生命周期组件注册父子组件通讯插槽(solt)devtoolsVue CLIVue LoaderVuex状态自管理全局变量状态管理Vue RouterElementFlex布局Vue相关文章 js基础 对象 JavaSc…...
2024/4/21 22:23:26 - 《吐血整理》-顶级程序员书单集
你知道的越多,你不知道的越多点赞再看,养成习惯给岁月以文明,而不是给文明以岁月本文 GitHub https://github.com/JavaFamily 上已经收录,有一线大厂面试点思维导图,也整理了很多我的文档,欢迎Star和完善,大家面试可以参照考点复习,希望我们一起有点东西。前言 王潇:…...
2024/4/23 1:23:33 - 热竞技:欧冠勒沃库森vs尤文图斯
热竞技Hot88体育讯 北京时间12月12日04:00,欧冠第6轮D组迎来一场抢分大战,由小组排名第3的勒沃库森主场迎战已经出线的尤文图斯。目前该组尤文已经铁定第一出线,莫斯科火车头已铁定无法出线,对两队来说本轮胜负已无关紧要,锻炼队伍是唯一目的。唯有7分的马德里竞技和6分的…...
2024/4/24 17:59:56 - Pod控制器Deployment使用详解(更新策略、回滚策略、暂停策略)以及金丝雀发布详解
文章目录Deployment更新策略关于金丝雀发布扩展知识发布规则发布流程回滚策略暂停策略 需要注意:在学习kubernetes时需要高清RC和deployment两着各自的不同点。 官方建议使用Deployment管理ReplicaSets,而不是直接使用ReplicaSet,这就意味着可能永远不需要直接操作ReplicaSe…...
2024/4/26 2:49:51 - 什么是CC攻击?如何有效防御?
CC攻击其实属于DDoS攻击的一种,其原理就是攻击者控制某些主机不停地发大量数据包给对方服务器造成服务器资源耗尽,一直到宕机崩溃。这种攻击普遍都是流量不是很高,但是破坏性非常大,直接导致系统服务挂了无法正常服务。CC攻击因其见效快、成本低、难追踪,是黑客最常用的攻…...
2024/4/26 10:47:27 - flowable核心数据库表详细表字段说明
数据模型设计清单数据表分类描述ACT_GE_*通用数据表ACT_RE_*流程定义存储表ACT_ID_*身份信息表ACT_RU_*运行时数据库表ACT_HI_*历史数据库表通用数据库数据表描述ACT_GE_PROPERTY属性表(保存流程引擎的kv键值属性)--PropertyEntityImplACT_GE_BTYEARRAY资源表(存储流程定义相关…...
2024/4/25 15:22:28 - 使用Istio治理微服务入门
近两年微服务架构流行,主流互联网厂商内部都已经微服务化,初创企业虽然技术积淀不行,但也通过各种开源工具拥抱微服务。再加上容器技术赋能,Kubernetes又添了一把火,微服务架构已然成为当前软件架构设计的首选。 但微服务化易弄,服务治理难搞!一、微服务的“痛点”微服务…...
2024/4/26 23:37:42 - SpringBoot2.X启动报错Could not resolve placeholder 'xxl.job.admin.address'
SpringBoot2.X启动报错Could not resolve placeholder xxl.job.admin.address解决思路 解决思路 想单独构建一个工程,依赖xxl-job的核心包做一个JOB任务服务,并且需要支持分环境打包,application.yml中配置为: profiles: active: @profileActive@同时pom.xml文件中,标签下…...
2024/4/27 0:51:42 - 如何在Bash中将字符串转换为小写?
bash中有一种方法可以将字符串转换为小写字符串? 例如,如果我有: a="Hi all"我想将其转换为: "hi all" #1楼 如果使用v4,则已烘焙 。 如果没有,这是一个简单的,广泛适用的解决方案。 此线程上的其他答案(和注释)对于创建下面的代码很有帮助。…...
2024/4/20 18:44:52 - IOS安全、逆向、反编译1-越狱知识讲解
之前开发了一个对安全性要求比较高的APP,所以对安全、逆向和反编译有了一些认识,最近有时间就想系统的把这些知识做一个整理。今天就开始把我的学习过程记录下来。iOS越狱环境搭建在学习iOS越狱之前,我们当然需要一台iOS设备,由于现在基本上都是64位系统为主,所以最好是使…...
2024/4/25 9:11:39 - yum的镜像源切换及yum安装软件常见错误解决方法、重新安装MariaDB、恢复原数据库文件到新库(一)
1、切换yum的镜像源 1.1 centOS7的镜像源文件的目录默认都在该路径下:/etc/yum.repos.d/ cd /etc/yum.repos.d/1.2 备份原来的yum镜像源【如果出现错误可以恢复原配置】 cp /etc/yum.repos.d/CentOS-Base.repo /etc/yum.repos.d/CentOS-Base.repo.bak1.3 下载国内常用的镜像源…...
2024/4/25 20:32:35 - 阿里云视频云正式支持AV1编码格式 为视频编码服务降本提效
今天我们要说的 AV1 可不是我们平时说的 .AVI 文件格式,它是由AOM(Alliance for Open Media,开放媒体联盟)制定的一个开源、免版权费的视频编码格式,可以解决H.265昂贵的专利费用和复杂的专利授权问题,是新一代领先的免版权费的编码标准。 随着短视频、直播的兴起,在线视…...
2024/4/25 22:07:51
最新文章
- 杰发科技AC7840——CAN通信简介(7)_波形分析
参考: CAN总线协议_stm32_mustfeng-GitCode 开源社区 0. 简介 隐形和显性波形 整帧数据表示 1. 字节描述 CAN数据帧标准格式域段域段名位宽:bit描述帧起始SOF(Start Of Frame)1数据帧起始标志,固定为1bit显性(b0)仲裁段dentify(ID)11本数…...
2024/4/27 7:24:01 - 梯度消失和梯度爆炸的一些处理方法
在这里是记录一下梯度消失或梯度爆炸的一些处理技巧。全当学习总结了如有错误还请留言,在此感激不尽。 权重和梯度的更新公式如下: w w − η ⋅ ∇ w w w - \eta \cdot \nabla w ww−η⋅∇w 个人通俗的理解梯度消失就是网络模型在反向求导的时候出…...
2024/3/20 10:50:27 - JRT高效率开发
得益于前期的基础投入,借助代码生成的加持,本来计划用一周实现质控物维护界面,实际用来四小时左右完成质控物维护主体,效率大大超过预期。 JRT从设计之初就是为了证明Spring打包模式不适合软件服务模式,觉得Spring打包…...
2024/4/26 22:07:51 - app上架-您的应用存在最近任务列表隐藏风险活动的行为,不符合华为应用市场审核标准。
上架提示 您的应用存在最近任务列表隐藏风险活动的行为,不符合华为应用市场审核标准。 修改建议:请参考测试结果进行修改。 请参考《审核指南》第2.19相关审核要求:https://developer.huawei.com/consumer/cn/doc/app/50104-02 造成原因 …...
2024/4/26 2:20:33 - 【外汇早评】美通胀数据走低,美元调整
原标题:【外汇早评】美通胀数据走低,美元调整昨日美国方面公布了新一期的核心PCE物价指数数据,同比增长1.6%,低于前值和预期值的1.7%,距离美联储的通胀目标2%继续走低,通胀压力较低,且此前美国一季度GDP初值中的消费部分下滑明显,因此市场对美联储后续更可能降息的政策…...
2024/4/26 18:09:39 - 【原油贵金属周评】原油多头拥挤,价格调整
原标题:【原油贵金属周评】原油多头拥挤,价格调整本周国际劳动节,我们喜迎四天假期,但是整个金融市场确实流动性充沛,大事频发,各个商品波动剧烈。美国方面,在本周四凌晨公布5月份的利率决议和新闻发布会,维持联邦基金利率在2.25%-2.50%不变,符合市场预期。同时美联储…...
2024/4/26 20:12:18 - 【外汇周评】靓丽非农不及疲软通胀影响
原标题:【外汇周评】靓丽非农不及疲软通胀影响在刚结束的周五,美国方面公布了新一期的非农就业数据,大幅好于前值和预期,新增就业重新回到20万以上。具体数据: 美国4月非农就业人口变动 26.3万人,预期 19万人,前值 19.6万人。 美国4月失业率 3.6%,预期 3.8%,前值 3…...
2024/4/26 23:05:52 - 【原油贵金属早评】库存继续增加,油价收跌
原标题:【原油贵金属早评】库存继续增加,油价收跌周三清晨公布美国当周API原油库存数据,上周原油库存增加281万桶至4.692亿桶,增幅超过预期的74.4万桶。且有消息人士称,沙特阿美据悉将于6月向亚洲炼油厂额外出售更多原油,印度炼油商预计将每日获得至多20万桶的额外原油供…...
2024/4/27 4:00:35 - 【外汇早评】日本央行会议纪要不改日元强势
原标题:【外汇早评】日本央行会议纪要不改日元强势近两日日元大幅走强与近期市场风险情绪上升,避险资金回流日元有关,也与前一段时间的美日贸易谈判给日本缓冲期,日本方面对汇率问题也避免继续贬值有关。虽然今日早间日本央行公布的利率会议纪要仍然是支持宽松政策,但这符…...
2024/4/25 18:39:22 - 【原油贵金属早评】欧佩克稳定市场,填补伊朗问题的影响
原标题:【原油贵金属早评】欧佩克稳定市场,填补伊朗问题的影响近日伊朗局势升温,导致市场担忧影响原油供给,油价试图反弹。此时OPEC表态稳定市场。据消息人士透露,沙特6月石油出口料将低于700万桶/日,沙特已经收到石油消费国提出的6月份扩大出口的“适度要求”,沙特将满…...
2024/4/25 18:39:22 - 【外汇早评】美欲与伊朗重谈协议
原标题:【外汇早评】美欲与伊朗重谈协议美国对伊朗的制裁遭到伊朗的抗议,昨日伊朗方面提出将部分退出伊核协议。而此行为又遭到欧洲方面对伊朗的谴责和警告,伊朗外长昨日回应称,欧洲国家履行它们的义务,伊核协议就能保证存续。据传闻伊朗的导弹已经对准了以色列和美国的航…...
2024/4/26 21:56:58 - 【原油贵金属早评】波动率飙升,市场情绪动荡
原标题:【原油贵金属早评】波动率飙升,市场情绪动荡因中美贸易谈判不安情绪影响,金融市场各资产品种出现明显的波动。随着美国与中方开启第十一轮谈判之际,美国按照既定计划向中国2000亿商品征收25%的关税,市场情绪有所平复,已经开始接受这一事实。虽然波动率-恐慌指数VI…...
2024/4/25 16:48:44 - 【原油贵金属周评】伊朗局势升温,黄金多头跃跃欲试
原标题:【原油贵金属周评】伊朗局势升温,黄金多头跃跃欲试美国和伊朗的局势继续升温,市场风险情绪上升,避险黄金有向上突破阻力的迹象。原油方面稍显平稳,近期美国和OPEC加大供给及市场需求回落的影响,伊朗局势并未推升油价走强。近期中美贸易谈判摩擦再度升级,美国对中…...
2024/4/26 16:00:35 - 【原油贵金属早评】市场情绪继续恶化,黄金上破
原标题:【原油贵金属早评】市场情绪继续恶化,黄金上破周初中国针对于美国加征关税的进行的反制措施引发市场情绪的大幅波动,人民币汇率出现大幅的贬值动能,金融市场受到非常明显的冲击。尤其是波动率起来之后,对于股市的表现尤其不安。隔夜美国股市出现明显的下行走势,这…...
2024/4/25 18:39:16 - 【外汇早评】美伊僵持,风险情绪继续升温
原标题:【外汇早评】美伊僵持,风险情绪继续升温昨日沙特两艘油轮再次发生爆炸事件,导致波斯湾局势进一步恶化,市场担忧美伊可能会出现摩擦生火,避险品种获得支撑,黄金和日元大幅走强。美指受中美贸易问题影响而在低位震荡。继5月12日,四艘商船在阿联酋领海附近的阿曼湾、…...
2024/4/25 18:39:16 - 【原油贵金属早评】贸易冲突导致需求低迷,油价弱势
原标题:【原油贵金属早评】贸易冲突导致需求低迷,油价弱势近日虽然伊朗局势升温,中东地区几起油船被袭击事件影响,但油价并未走高,而是出于调整结构中。由于市场预期局势失控的可能性较低,而中美贸易问题导致的全球经济衰退风险更大,需求会持续低迷,因此油价调整压力较…...
2024/4/26 19:03:37 - 氧生福地 玩美北湖(上)——为时光守候两千年
原标题:氧生福地 玩美北湖(上)——为时光守候两千年一次说走就走的旅行,只有一张高铁票的距离~ 所以,湖南郴州,我来了~ 从广州南站出发,一个半小时就到达郴州西站了。在动车上,同时改票的南风兄和我居然被分到了一个车厢,所以一路非常愉快地聊了过来。 挺好,最起…...
2024/4/26 22:01:59 - 氧生福地 玩美北湖(中)——永春梯田里的美与鲜
原标题:氧生福地 玩美北湖(中)——永春梯田里的美与鲜一觉醒来,因为大家太爱“美”照,在柳毅山庄去寻找龙女而错过了早餐时间。近十点,向导坏坏还是带着饥肠辘辘的我们去吃郴州最富有盛名的“鱼头粉”。说这是“十二分推荐”,到郴州必吃的美食之一。 哇塞!那个味美香甜…...
2024/4/25 18:39:14 - 氧生福地 玩美北湖(下)——奔跑吧骚年!
原标题:氧生福地 玩美北湖(下)——奔跑吧骚年!让我们红尘做伴 活得潇潇洒洒 策马奔腾共享人世繁华 对酒当歌唱出心中喜悦 轰轰烈烈把握青春年华 让我们红尘做伴 活得潇潇洒洒 策马奔腾共享人世繁华 对酒当歌唱出心中喜悦 轰轰烈烈把握青春年华 啊……啊……啊 两…...
2024/4/26 23:04:58 - 扒开伪装医用面膜,翻六倍价格宰客,小姐姐注意了!
原标题:扒开伪装医用面膜,翻六倍价格宰客,小姐姐注意了!扒开伪装医用面膜,翻六倍价格宰客!当行业里的某一品项火爆了,就会有很多商家蹭热度,装逼忽悠,最近火爆朋友圈的医用面膜,被沾上了污点,到底怎么回事呢? “比普通面膜安全、效果好!痘痘、痘印、敏感肌都能用…...
2024/4/25 2:10:52 - 「发现」铁皮石斛仙草之神奇功效用于医用面膜
原标题:「发现」铁皮石斛仙草之神奇功效用于医用面膜丽彦妆铁皮石斛医用面膜|石斛多糖无菌修护补水贴19大优势: 1、铁皮石斛:自唐宋以来,一直被列为皇室贡品,铁皮石斛生于海拔1600米的悬崖峭壁之上,繁殖力差,产量极低,所以古代仅供皇室、贵族享用 2、铁皮石斛自古民间…...
2024/4/25 18:39:00 - 丽彦妆\医用面膜\冷敷贴轻奢医学护肤引导者
原标题:丽彦妆\医用面膜\冷敷贴轻奢医学护肤引导者【公司简介】 广州华彬企业隶属香港华彬集团有限公司,专注美业21年,其旗下品牌: 「圣茵美」私密荷尔蒙抗衰,产后修复 「圣仪轩」私密荷尔蒙抗衰,产后修复 「花茵莳」私密荷尔蒙抗衰,产后修复 「丽彦妆」专注医学护…...
2024/4/26 19:46:12 - 广州械字号面膜生产厂家OEM/ODM4项须知!
原标题:广州械字号面膜生产厂家OEM/ODM4项须知!广州械字号面膜生产厂家OEM/ODM流程及注意事项解读: 械字号医用面膜,其实在我国并没有严格的定义,通常我们说的医美面膜指的应该是一种「医用敷料」,也就是说,医用面膜其实算作「医疗器械」的一种,又称「医用冷敷贴」。 …...
2024/4/25 18:38:58 - 械字号医用眼膜缓解用眼过度到底有无作用?
原标题:械字号医用眼膜缓解用眼过度到底有无作用?医用眼膜/械字号眼膜/医用冷敷眼贴 凝胶层为亲水高分子材料,含70%以上的水分。体表皮肤温度传导到本产品的凝胶层,热量被凝胶内水分子吸收,通过水分的蒸发带走大量的热量,可迅速地降低体表皮肤局部温度,减轻局部皮肤的灼…...
2024/4/25 18:38:57 - 配置失败还原请勿关闭计算机,电脑开机屏幕上面显示,配置失败还原更改 请勿关闭计算机 开不了机 这个问题怎么办...
解析如下:1、长按电脑电源键直至关机,然后再按一次电源健重启电脑,按F8健进入安全模式2、安全模式下进入Windows系统桌面后,按住“winR”打开运行窗口,输入“services.msc”打开服务设置3、在服务界面,选中…...
2022/11/19 21:17:18 - 错误使用 reshape要执行 RESHAPE,请勿更改元素数目。
%读入6幅图像(每一幅图像的大小是564*564) f1 imread(WashingtonDC_Band1_564.tif); subplot(3,2,1),imshow(f1); f2 imread(WashingtonDC_Band2_564.tif); subplot(3,2,2),imshow(f2); f3 imread(WashingtonDC_Band3_564.tif); subplot(3,2,3),imsho…...
2022/11/19 21:17:16 - 配置 已完成 请勿关闭计算机,win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机...
win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机”问题的解决方法在win7系统关机时如果有升级系统的或者其他需要会直接进入一个 等待界面,在等待界面中我们需要等待操作结束才能关机,虽然这比较麻烦,但是对系统进行配置和升级…...
2022/11/19 21:17:15 - 台式电脑显示配置100%请勿关闭计算机,“准备配置windows 请勿关闭计算机”的解决方法...
有不少用户在重装Win7系统或更新系统后会遇到“准备配置windows,请勿关闭计算机”的提示,要过很久才能进入系统,有的用户甚至几个小时也无法进入,下面就教大家这个问题的解决方法。第一种方法:我们首先在左下角的“开始…...
2022/11/19 21:17:14 - win7 正在配置 请勿关闭计算机,怎么办Win7开机显示正在配置Windows Update请勿关机...
置信有很多用户都跟小编一样遇到过这样的问题,电脑时发现开机屏幕显现“正在配置Windows Update,请勿关机”(如下图所示),而且还需求等大约5分钟才干进入系统。这是怎样回事呢?一切都是正常操作的,为什么开时机呈现“正…...
2022/11/19 21:17:13 - 准备配置windows 请勿关闭计算机 蓝屏,Win7开机总是出现提示“配置Windows请勿关机”...
Win7系统开机启动时总是出现“配置Windows请勿关机”的提示,没过几秒后电脑自动重启,每次开机都这样无法进入系统,此时碰到这种现象的用户就可以使用以下5种方法解决问题。方法一:开机按下F8,在出现的Windows高级启动选…...
2022/11/19 21:17:12 - 准备windows请勿关闭计算机要多久,windows10系统提示正在准备windows请勿关闭计算机怎么办...
有不少windows10系统用户反映说碰到这样一个情况,就是电脑提示正在准备windows请勿关闭计算机,碰到这样的问题该怎么解决呢,现在小编就给大家分享一下windows10系统提示正在准备windows请勿关闭计算机的具体第一种方法:1、2、依次…...
2022/11/19 21:17:11 - 配置 已完成 请勿关闭计算机,win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机”的解决方法...
今天和大家分享一下win7系统重装了Win7旗舰版系统后,每次关机的时候桌面上都会显示一个“配置Windows Update的界面,提示请勿关闭计算机”,每次停留好几分钟才能正常关机,导致什么情况引起的呢?出现配置Windows Update…...
2022/11/19 21:17:10 - 电脑桌面一直是清理请关闭计算机,windows7一直卡在清理 请勿关闭计算机-win7清理请勿关机,win7配置更新35%不动...
只能是等着,别无他法。说是卡着如果你看硬盘灯应该在读写。如果从 Win 10 无法正常回滚,只能是考虑备份数据后重装系统了。解决来方案一:管理员运行cmd:net stop WuAuServcd %windir%ren SoftwareDistribution SDoldnet start WuA…...
2022/11/19 21:17:09 - 计算机配置更新不起,电脑提示“配置Windows Update请勿关闭计算机”怎么办?
原标题:电脑提示“配置Windows Update请勿关闭计算机”怎么办?win7系统中在开机与关闭的时候总是显示“配置windows update请勿关闭计算机”相信有不少朋友都曾遇到过一次两次还能忍但经常遇到就叫人感到心烦了遇到这种问题怎么办呢?一般的方…...
2022/11/19 21:17:08 - 计算机正在配置无法关机,关机提示 windows7 正在配置windows 请勿关闭计算机 ,然后等了一晚上也没有关掉。现在电脑无法正常关机...
关机提示 windows7 正在配置windows 请勿关闭计算机 ,然后等了一晚上也没有关掉。现在电脑无法正常关机以下文字资料是由(历史新知网www.lishixinzhi.com)小编为大家搜集整理后发布的内容,让我们赶快一起来看一下吧!关机提示 windows7 正在配…...
2022/11/19 21:17:05 - 钉钉提示请勿通过开发者调试模式_钉钉请勿通过开发者调试模式是真的吗好不好用...
钉钉请勿通过开发者调试模式是真的吗好不好用 更新时间:2020-04-20 22:24:19 浏览次数:729次 区域: 南阳 > 卧龙 列举网提醒您:为保障您的权益,请不要提前支付任何费用! 虚拟位置外设器!!轨迹模拟&虚拟位置外设神器 专业用于:钉钉,外勤365,红圈通,企业微信和…...
2022/11/19 21:17:05 - 配置失败还原请勿关闭计算机怎么办,win7系统出现“配置windows update失败 还原更改 请勿关闭计算机”,长时间没反应,无法进入系统的解决方案...
前几天班里有位学生电脑(windows 7系统)出问题了,具体表现是开机时一直停留在“配置windows update失败 还原更改 请勿关闭计算机”这个界面,长时间没反应,无法进入系统。这个问题原来帮其他同学也解决过,网上搜了不少资料&#x…...
2022/11/19 21:17:04 - 一个电脑无法关闭计算机你应该怎么办,电脑显示“清理请勿关闭计算机”怎么办?...
本文为你提供了3个有效解决电脑显示“清理请勿关闭计算机”问题的方法,并在最后教给你1种保护系统安全的好方法,一起来看看!电脑出现“清理请勿关闭计算机”在Windows 7(SP1)和Windows Server 2008 R2 SP1中,添加了1个新功能在“磁…...
2022/11/19 21:17:03 - 请勿关闭计算机还原更改要多久,电脑显示:配置windows更新失败,正在还原更改,请勿关闭计算机怎么办...
许多用户在长期不使用电脑的时候,开启电脑发现电脑显示:配置windows更新失败,正在还原更改,请勿关闭计算机。。.这要怎么办呢?下面小编就带着大家一起看看吧!如果能够正常进入系统,建议您暂时移…...
2022/11/19 21:17:02 - 还原更改请勿关闭计算机 要多久,配置windows update失败 还原更改 请勿关闭计算机,电脑开机后一直显示以...
配置windows update失败 还原更改 请勿关闭计算机,电脑开机后一直显示以以下文字资料是由(历史新知网www.lishixinzhi.com)小编为大家搜集整理后发布的内容,让我们赶快一起来看一下吧!配置windows update失败 还原更改 请勿关闭计算机&#x…...
2022/11/19 21:17:01 - 电脑配置中请勿关闭计算机怎么办,准备配置windows请勿关闭计算机一直显示怎么办【图解】...
不知道大家有没有遇到过这样的一个问题,就是我们的win7系统在关机的时候,总是喜欢显示“准备配置windows,请勿关机”这样的一个页面,没有什么大碍,但是如果一直等着的话就要两个小时甚至更久都关不了机,非常…...
2022/11/19 21:17:00 - 正在准备配置请勿关闭计算机,正在准备配置windows请勿关闭计算机时间长了解决教程...
当电脑出现正在准备配置windows请勿关闭计算机时,一般是您正对windows进行升级,但是这个要是长时间没有反应,我们不能再傻等下去了。可能是电脑出了别的问题了,来看看教程的说法。正在准备配置windows请勿关闭计算机时间长了方法一…...
2022/11/19 21:16:59 - 配置失败还原请勿关闭计算机,配置Windows Update失败,还原更改请勿关闭计算机...
我们使用电脑的过程中有时会遇到这种情况,当我们打开电脑之后,发现一直停留在一个界面:“配置Windows Update失败,还原更改请勿关闭计算机”,等了许久还是无法进入系统。如果我们遇到此类问题应该如何解决呢࿰…...
2022/11/19 21:16:58 - 如何在iPhone上关闭“请勿打扰”
Apple’s “Do Not Disturb While Driving” is a potentially lifesaving iPhone feature, but it doesn’t always turn on automatically at the appropriate time. For example, you might be a passenger in a moving car, but your iPhone may think you’re the one dri…...
2022/11/19 21:16:57