深度学习基于摄像头和激光雷达融合的3-D目标检测
论文地址:https://arxiv.org/abs/2004.03080
源码地址:https://gitee.com/long_xiao_wyh/pseudo-LiDAR_e2e
以前在传感器融合讲过数据级的融合(深度图)和任务级的融合(比如检测),大家有时候讨论前融合和后融合的区别,或者是一种中间层融合。提到过的摄像头和激光雷达在目标检测任务的融合方法,有AVOD、PointFusion、RoarNet和F-PointNets等。这里列出一些论文讨论。
“MLOD: A multi-view 3D object detection based on robust feature fusion method”, 2019, 9
本文是一个多视图标记的目标检测器(MLOD)。检测器将RGB图像和激光雷达点云作为输入,并遵循两步目标检测框架。区域提议网络(RPN)在点云的鸟瞰视图(BEV)投影中生成3D提议。第二步将3D提议边框投影到图像和BEV特征图,并将相应的图截取发送到检测头(detector head)以进行分类和边界框回归。与其他多视图方法不同,裁剪的图像特征不直接馈送到检测头,而是被深度信息掩盖以过滤掉3D边框外的部分。图像和BEV特征的融合具有挑战性,因为它们来自不同的视角。这里引入了一种新检测头,不仅可以从融合层提供检测结果,还可以从每个传感器通道提供检测结果。因此,可以用不同视图标记的数据训练目标检测器,以避免特征提取器的退化。
本文提出的两步神经网络结构如图所示。BEV图和RGB图像被馈入两个卷积神经网络获得特征。 为了提高计算效率,仅使用RPN的鸟瞰视图(BEV)特征生成3D提议。 基于提议的深度信息,3D提议之外的图像特征被前景掩码层(foreground mask layer)掩盖。 然后,掩码的图像特征图和BEV特征图被裁剪并传递到多视图头(multi-view header),提供最终的分类、定位和定向结果。
 为在提议的3D边框内正确捕获目标的图像特征,本文引入了前景掩码层来过滤掉前景特征。下图显示了前景掩码层的流程:首先,该层用3D提议投影的前视2D边框裁剪并调整其(稀疏)深度图的大小;然后将nk×nk深度图等分成k×k网格;该层计算每个网格单元中非零深度值的中值mij,因为零值表示该像素没有激光雷达点信息。
为在提议的3D边框内正确捕获目标的图像特征,本文引入了前景掩码层来过滤掉前景特征。下图显示了前景掩码层的流程:首先,该层用3D提议投影的前视2D边框裁剪并调整其(稀疏)深度图的大小;然后将nk×nk深度图等分成k×k网格;该层计算每个网格单元中非零深度值的中值mij,因为零值表示该像素没有激光雷达点信息。

在多视图3D目标检测方法中,基于BEV的IoU来分配提议标签。但前视图的IoU可能与BEV的IoU明显不同。如图所示是将3D边框分配给负标签但在图像视图中IoU > 0.7的示例。 当仅基于BEV IoU分配标签来训练目标检测器时,(前视图)图像通道的性能降低。

作者提出了一种多视图检测头,以避免RGB图像特征的衰减。 下图显示了头部网络结构:关键想法是在融合层(concat)之前为每个通道添加额外的输出层;两个输出的每一个馈入到相应的子输出(sub-output)损失中。

下图给出一些直观的结果例子:每张图像检测车辆为绿色,行人为蓝色,骑车者为黄色。
 “Multi-Sensor 3D Object Box Refinement for Autonomous Driving”,2019,9
“Multi-Sensor 3D Object Box Refinement for Autonomous Driving”,2019,9
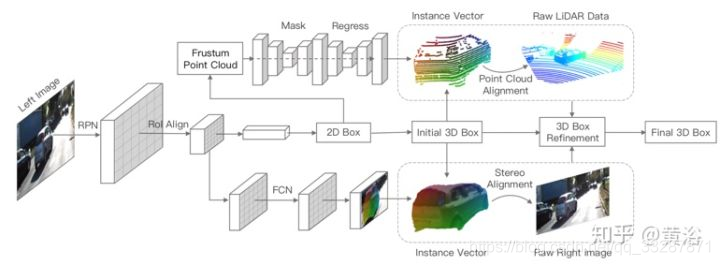
这是一个在自动驾驶中多传感器细化的3D对象检测系统。单目摄像头充当2D目标提议和初始3D边框预测的基本传感器,而立体相机和激光雷达视为自适应插入式传感器,改善3D边框的定位性能。对于原始观测的每个观察元素(例如,立体视觉的像素,激光雷达的3D点),该方法将局部几何模型建模为实例向量(instance vector)表示,代表每个元素相对于目标帧的3D坐标。使用这样统一的几何表示,有利于立体视觉光度对齐(stereo photometric alignment)或点云对齐(point cloud alignment)来统一地细化3D目标位置估计。
如下图所示,首先是一个单目3D目标检测器设计。给定单个图像作为基本输入,将Faster R-CNN扩展到轻量级单目3D目标检测器,其中预测几个空间信息、2D框和目标类,以此推断初始的3D边框。如前所说,将图像或点云的目标结构信息建模为统一的实例向量表示。具体来说,如果有立体图像可用,用基于区域的FCN预测RoIAlign层之后的目标实例向量和分割掩码。将掩码实例向量锚框到初始3D边框,获得密集的目标级3D重构(图下半部分)。然后,将形状-觉察的目标补丁从左图扭曲到右图,并优化最小光度误差提高初始3D边框精度。
如果有点云数据,采用PointNet 来预测逐点实例向量。与F-PointNet类似,将视锥中包含的点云作为输入,并依次执行掩码分割和实例向量回归。基于逐点实例向量,每个3D点都与目标中心相关联,在相同表示下形成稀疏的局部形状(图上半部分)。同样,将局部结构重新投影到原始激光雷达点云,并最小化逐点距离,进一步重定位3D目标。
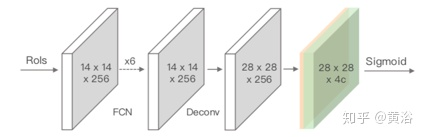
下图是本文单目3D目标检测的数据流:该3D检测器采用与Faster R-CNN类似的架构,使用相同区域提议网络(RPN)生成2D RoIs;RoI Align之后,特征图映射到R-CNN头部提取高级语义信息;除了目标分类和2D框回归之外,还利用其他全连接(FC)层预测几个空间属性以恢复3D边框;由于位置信息和尺寸信息的丢失,直接从裁剪图像RoI回归3D目标姿态是个病态问题,这里用基于残差的回归来预测2D投影和3D目标中心的深度;同样,采用了一个基于多格(Multi-Bin)的朝向估计策略:对目标角度位于k个格的概率进行分类,并对目标角度与边框的射线方向之间偏移角的余弦和正弦进行回归。
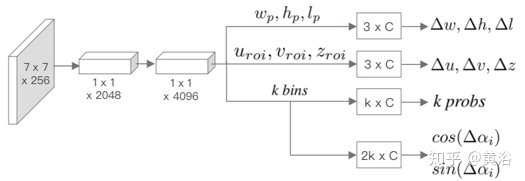
看到其输出的,是维度偏差、图像位置和深度偏差、多个朝向角度的概率以及偏移角度的余弦和正弦。
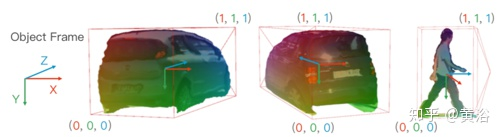
下图是定义实例向量的示意图:为了一致性,物理坐标归一化为[0,1]。
而如图是用于逐像素实例向量预测和掩码分割的R-CNN头架构图。
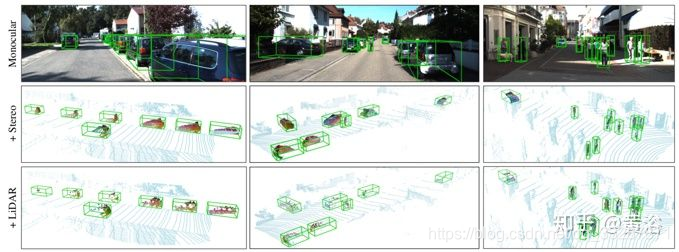
最后看一些结果示例:从上到下依次是使用单目、立体图像和激光雷达点云的3D检测结果,这里还使用实例向量表示形式可视化重建的目标形状。
“Pseudo-LiDAR++: Accurate Depth for 3D Object Detection in Autonomous Driving“, 2019,8
在3D空间检测汽车和行人等物体在自动驾驶中起着不可或缺的作用。现有方法在很大程度上依靠昂贵的激光雷达传感器来获得准确的深度信息。最近已经将伪激光雷达(pseudo-LiDAR)用作一种有前途的替代方案,仅基于立体图像的话其成本要低得多,但仍然存在明显的性能差距。
本文通过改进立体深度估计,为pseudo-LiDAR框架做出了实质性的进步。具体而言,调整立体视觉网络架构和损失函数,使其远目标的深度估计更加精确(当前这是pseudo-LiDAR的主要缺点)。这里基准的深度估计算法是CVPR‘18发表的PSM-Net(Pyramid stereo matching net work)模型。
进一步,用便宜但极稀疏的激光雷达传感器,虽然作为3D检测信息不足,但能使原来的深度估算偏移减小。这是一种在初始深度估计指导下进行深度传播的算法,将这几个精确的测深度值分散到整个深度图上。
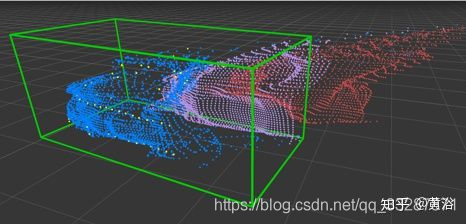
下图是深度估计和校正方法的效果说明。绿色框是KITTI数据集车辆的真实位置。 红点是通过立体视差网络获得的。 通过立体深度网络(SDN,stereo depth network)获得的紫色点更接近真实。 经过一些激光雷达测量值(黄色)的深度传播(蓝点)后,汽车正好位于绿色框内。
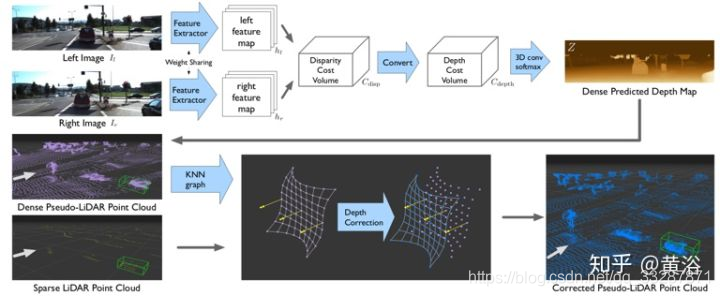
下图是改进的立体深度估计流程图:(顶部)立体深度网络(SDN)从左右图像构建深度成本容积(cost volume),并对直接深度估计进行了优化; (底部)基于图的深度校正算法(GDC)通过稀疏激光雷达测量来细化深度图。其中灰色箭头表示观察点。
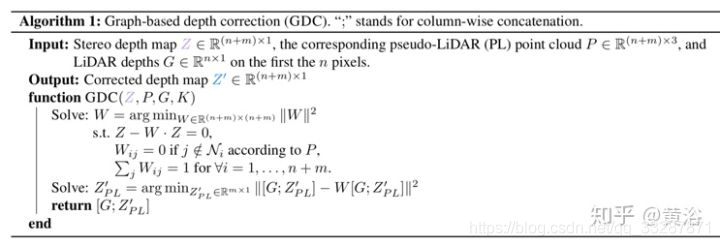
附上一个伪代码实现的GDC算法。
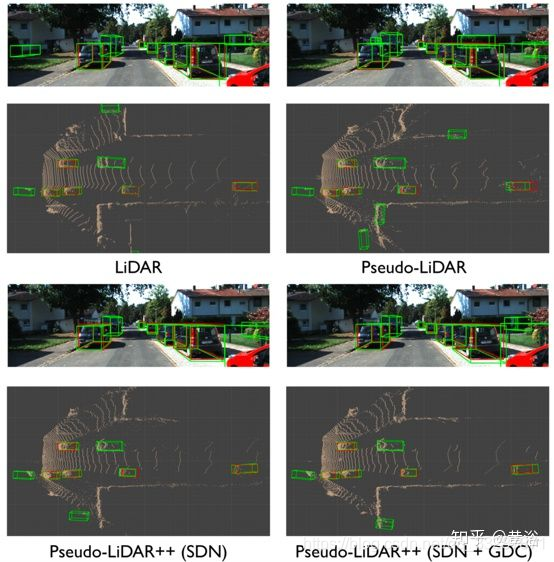
最后看一些结果图:本文在获得pseudo-LiDAR数据后,采用三个基于激光雷达点云数据的3-D目标检测算法,即AVOD、PIXOR和Point-RCNN;这里展示的是P-RCNN在KITTI验证场景不同输入点云的检测结果,包括前视图图像和鸟瞰(BEV)点图;真实边框为红色,预测边框为绿色。 观察者从BEV图的左手边向右看。 换句话说,右侧的真实框离观察者更远(即更深),因此很难定位。
“Improving 3D Object Detection for Pedestrians with Virtual Multi-View Synthesis Orientation Estimation”,2019,7
对于自动驾驶,准确估计行人的方向是一项重要且具有挑战性的任务。该文提出一个灵活的虚拟多视图合成(Virtual Multi-View Synthesis)模块,用于3D目标检测方法改善朝向估计。为实现精确的朝向估计,该模块使用多步过程获取所需的细粒度语义信息。
首先,使用结构保留的深度完整(depth completion)算法对场景的点云进行致密化,并用对应的RGB像素对每个点进行着色。接下来,将虚拟摄像机放置在致密点云中的每个目标周围,生成新的视点,从而保留目标的外观。该模块极大地改善了KITTI基准中具有挑战性的行人朝向估计。
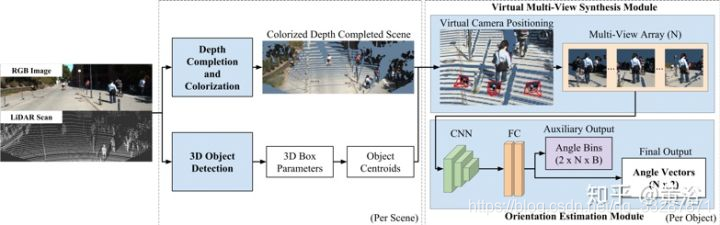
如图概述3D行人姿势(pose)估计的流程图。给定一组3D检测,每个检测由质心T =(tx,ty,tz),尺寸D =(dx,dy,dz)和基于欧拉角的朝向O =(θ,φ,ψ)参数化,目的是提供感兴趣目标朝向更准确的估计。对于KITTI基准,假定俯仰角(pitch)和横滚角(roll)为零,仅考虑偏航角或航向角θyaw。
该方法核心思想是从带RGB颜色的致密点云中生成目标逼真的新视点,依此提取目标的丰富语义信息,得到更准确的朝向估计。首先,基于现有3D检测器的性能,把3D检测作为质心提议。这些提议由虚拟多视图合成模块处理,该模块用密集点云重构得到一组新视图。重要的是,这些视图是将虚拟摄像机放在和每个目标质心一致的位置在一组规范的摄像机视点中创建的。与剪裁的ROI相比,这些虚拟相机生成的目标视图更好地保留目标的3D形状和外观。
每个生成的新视图分别通过CNN,然后通过朝向回归输出头估计各自朝向。合并这些朝向估计得到最终朝向的输出。最后,由于流水线中使用的3D检测器是基于具有较高召回率(recall)的基础上选择的,这里使用鲁棒的2D检测器进行误报抑制(false positive suppression)。
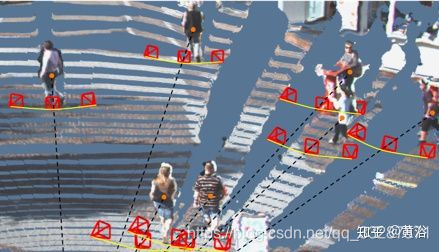
如下图是虚拟相机放置示意图。虚拟相机放置在与每个目标质心等距的位置,相对于从原始相机中心到目标质心的光线,这个视点的范围是−25º至25º,如图中黑色虚线所示 (仅显示11个摄像机位置中的3个)。
最后是结果例子:文章工作采用AVOD-FPN作为3D检测器,如下图是有和无朝向模块的AVOD-FPN检测的比较。 从左到右:AVOD-FPN,VMVS,真实值。 AVOD-FPN可检测到所有行人实例,但对于几个目标的朝向估计很差,在检测中还包括误报。 VMVS估计的朝向与实际情况更接近,同时还消除了误报。

“Class-specific Anchoring Proposal for 3D Object Recognition in LIDAR and RGB Images”,2019,7
在现实生活应用中,例如自动驾驶汽车,通常二维空间检测是不够的,需要的是对周围环境的3D精确识别和定向。因此,在3D环境下准确有效地检测目标与广泛的工业应用变得越来越相关。但是,构建检测3D目标系统是一项艰巨的任务,因为它依赖于来自不同传感数据的多模式融合。
该文工作用当前最好的3D目标检测器研究锚(anchoring)框的效果。基于目标大小和纵横比的锚框聚类,其提出一种类特定的锚框提议(CAP,Class-specific Anchoring Proposal)策略。实验看出,锚框聚类可显着增强RPN所提出的RoI性能。
如图所示,该研究RGB图像和激光雷达点云数据,探索针对3D目标识别的AVOD算法(CVPR‘17)的CAP策略的影响。该框架采用RBG图像和相应的3D点云输入,预测3维边框,将目标分为三类:自行车,行人和汽车。 该框架的主要组成部分是鸟瞰视角(BEV,Bird-Eye-View)图生成、CAP策略和AVOD模型,其中模型包含三个网络:编码器-解码器网络、区域提议网络网络(RPN)和最终检测和姿态估计网络。
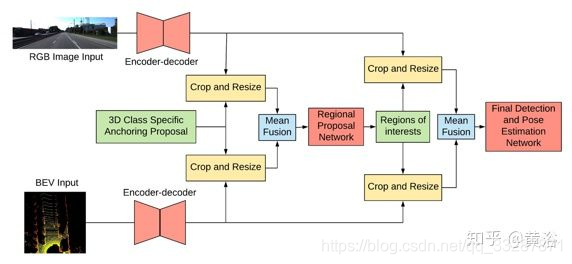
为了找到适合特定类锚框的大小,它用K-均值聚类和高斯混合模型(GMM)方法。根据RGB和BEV特征图对锚框进行裁剪和大小调整,生成的张量进行融合保持来自两个来源的信息。基于建议的锚框,RPN生成兴趣区域(ROI)。所选ROI覆盖了包含要检测的所需目标的区域。最终检测和姿态估计网络对ROI偏移量进行回归,并确定每个ROI的类。
最后,下图给出实验结果例子。左边是AVOD框架,而右边是CAP-AVOD框架。

“MVX-Net: Multimodal VoxelNet for 3D Object Detection”,2019,4
尽管一些方法融合了来自不同模态的数据,但是要么在复杂的流水线中依次处理模态,要么做后融合而无法在早期学习不同模态之间的交互。多模式VoxelNet(MVXNet)用语义图像特征增强激光雷达点云,并在早期学习做到图像和激光雷达特征的融合,实现精确的3D目标检测。
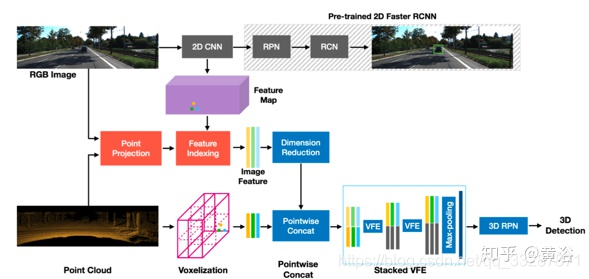
其中有两个融合模块:1)PointFusion,早期融合,将激光雷达传感器的点投影到图像平面,然后从预训练的2D检测器提取图像特征。然后在VoxelNet架构共同处理图像特征和相应点云的联合;2)VoxelFusion,将VoxelNet创建的非空3D体素(voxel)投影到图像上,然后用预训练的CNN模型从每个投影体素提取图像特征,之后池化这些特征并附加到每个体素的VFE(voxel feature encoding)特征编码中,由3D RPN进一步生成3D边框。最后,对KITTI数据集的评估表明,与仅用点云数据方法比,该方法性能有了显着提高。
如图是MVX-Net PointFusion方法概述。该方法用预训练的2D faster-RCNN卷积滤波器计算图像特征图。 用标定信息将3D点投影到图像上,并将相应的图像特征附加到3D点上。 VFE层和3D RPN处理汇总的数据并产生3D检测。
而下一个图是MVX-Net VoxelFusion方法概述。同样地,该方法用预训练的2D faster-RCNN卷积滤波器来计算图像特征图。 用标定信息将非空体素投影到图像获得ROI。 每个ROI的特征放入池化,并附加到VFE层计算的体素特征。3D RPN处理汇总数据并产生3D检测。

采用的Faster-RCNN框架由区域提议网络(RPN)和区域分类网络(RCN)组成。将ImageNet预训练的VGG16模型用作基本网络,并用2D检测数据集的标注数据对Faster-RCNN网络进行微调。
文章选择VoxelNet体系结构作为基础3D检测网络是因为两个主要原因:(i)消费原始点云并消除对手工特征的需求;(ii)提供自然有效的界面,用于在3D空间组合不同粒度的图像特征,即点和体素。
VoxelNet算法由三个模块组成:(i)体素特征编码(VFE)层(ii)卷积中间层,以及(iii)3D区域提议网络。
最后,下图是结果例子:(a)VoxelNet,(b)带VoxelFusion的MVX-Net,(c)带PointFusion的MVX-Net。 绿色框表示检测结果,红色框突出显示漏检和误报。

“Sensor Fusion for Joint 3D Object Detection and Semantic Segmentation”,2019,4
是Uber自动驾驶的工作,是对其纯激光雷达数据的目标检测器LaserNet(CVPR‘19论文“LaserNet: An Efficient Probabilistic 3D Object Detector for Autonomous Driving”)的推广,一种图像数据与LiDAR数据融合的方法,实验表明这种传感器融合方法,特别是在长距离情况下,提高了模型的检测性能。图像数据的添加非常简单,不需要图像标注。先前的工作多是将3D目标检测和语义分割作为单独的任务进行处理,而该方法扩展了模型的功能,除了执行3D对象检测之外,还执行3D语义分割。将两个任务合并为一个模型能够更好地利用自动驾驶汽车可用的计算资源。另外,该方法可以端到端地训练无需其他2D图像标注。
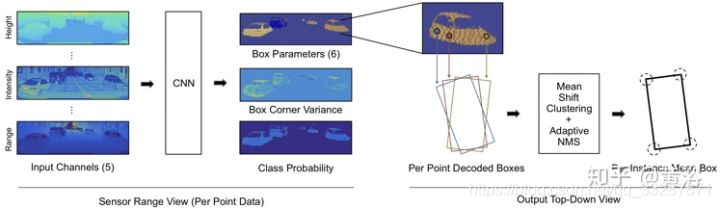
首先,看看LaserNet的架构,如图所示:传感器的固有距离的视图表示构建致密的输入图像;图像通过全卷积网络传递产生一组预测;对图像中的每个激光雷达点,预测一个类别概率,然后在顶视图回归边框的概率分布;这些点分布通过mean shift聚类组合减少各个预测的噪声;整个检测器经过端到端的训练,损失在边框角点计算;在推断时,用一种自适应的非最大抑制(NMS)算法消除重复的边框分布。
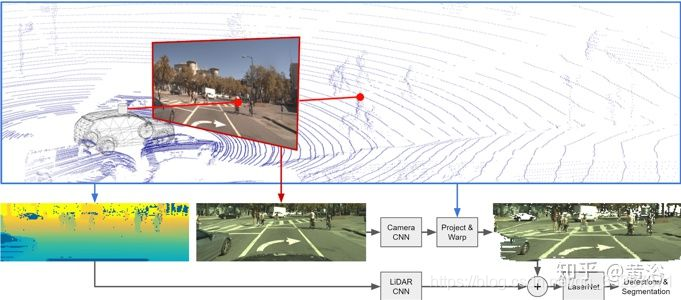
现在和摄像头图像融合的方法如下图所示:两种传感器形式均表示为图像,特别是3D数据使用激光雷达的原始距离视图表示;该方法将3D点投影到2D图像上,将激光雷达点与相机的像素关联,并且此映射也用于从相机图像的信息变换(warp)到激光雷达图像;该方法并没有如图所示的将RGB值变换,而是融合CNN提取的特征;然后,将激光雷达和相机特征合为一体传递给LaserNet,然后对整个模型进行端到端训练,执行3D目标检测和语义分割。
最后,看结果如下图给出的一些有趣的成功和失败例子。(顶图)检测到一大排停放的摩托车中的每辆摩托车。 (第二行)检测到距离自动驾驶车约50-60米的几辆自行车,这时候激光雷达点云是比较稀疏的。 (第三行)网络将下车的大多数人点云分类为车,但是仍然产生正确的边框,这是在激光雷达点云预测边框的好处。 (下图)由于右侧道路的高度陡峭变化,模型错误地将道路的点预测为背景。

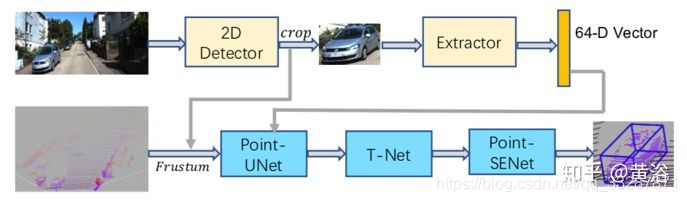
“3D Object Detection Using Scale Invariant and Feature Reweighting Networks”,2019,1
该方法叫尺度不变和特征权重网络(SIFRNet,Scale Invariant and Feature Reweighting Network),用集合抽象(Set Abstraction,SA)模块和点特征传播(Feature Propagation,FP)模块改进网络。
其中Point-Unet子网实现尺度不变性并捕获朝向信息,重点是利用前视图图像和视锥(frustum)点云生成3D检测结果,T-Net子网最初是用于兴趣点的集中,在网络中使用SA模块不仅学习全局特征还考虑额外的激光雷达反射强度特征。
同时,系统中PointSIFT模块提高3D分割的性能,捕获空间不同朝向的信息以及不同尺度形状的鲁棒性;Point-SENet模块获得有用的特征并抑制较少信息的特征,该模块重新加权通道特征并更有效地估计3D边框。
如图是整个系统的流程图:注意三个模块,即Point-Unet,T-Net和Point-SENet。
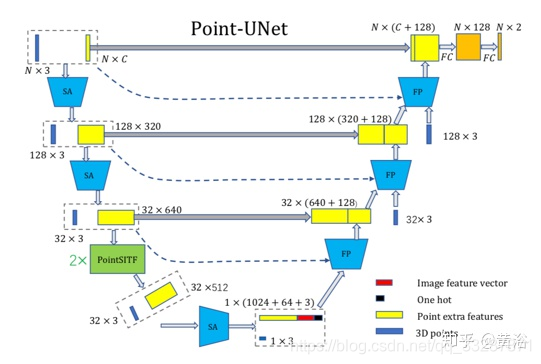
关于Point-UNet的体系结构,如图所示:网络输入数据是N×3 维的3D点云,相应额外数据是3通道的N×3 RGB图像和N×1激光雷达反射强度图(N是点云数);首先,通过两个集合抽象(SA)模块提取点云特征,这些模块包括卷积和池化操作;由于Pointnet无法考虑点云的朝向信息以及缺乏形状尺度的适应性,因此引入基于Pointnet ++分割网络的PointSIFT模块;在全局SA模块之前,有两个PointSIFT模块。
再看T-Net的体系结构,如图所示,其主要估计3D边框中心,并将兴趣点转换到边框中心。 在此过程之后,后续网络仅需要进一步预测最终3D边框的残差位移量。网络的输入是Point-UNet的兴趣点。提取的特征是激光雷达的反射强度。SA模块提取3D点云的全局特征。接着两个全连接层预测负中心坐标,其添加到原始输入点即实现点云的平移。该网络在功能上类似于残留网络结构的平移网络(translation network)。

Point-SENet的输入是来自T-Net的3D点云,没有用额外的特征。首先,执行2个逐点卷积以获得高维点云特征。由于一般CNN并未考虑所有通道特征的关系,导致一些无用的特征传播到后续网络,降低整个网络的性能。这里将SENet模块扩展到3D空间,直接在3D点云运行。
Point-SENet模型的第三次卷积获取SENet模块的输入特征。首先,压缩(squeeze)操作由全局最大池化层而不是全局平均池化层实现,将空间信息聚合到通道特征。其次,两个全连接层和一个sigmoid函数完成激励操作。
最后是一些结果图:第一列2D图像的2D检测结果。 第二列投影在2D图像的3D框。 最后一列展示激光雷达上的3D检测结果。 其中真实框为红色,预测框为蓝色。

如若内容造成侵权/违法违规/事实不符,请联系编程学习网邮箱:809451989@qq.com进行投诉反馈,一经查实,立即删除!
相关文章
- java防止重复提交解决方案
java开发防止重复提交问题问题描述解决思路代码解释 问题描述 1.在我们项目开发过程中会出现用户保存操作时候快速点击两次会出现一条数据在数据库保存多条数据。 2.遇见上述问题我们首先跟前端开发沟通,在前端开发过程中可以将操作按钮在操作完后就行置灰操作,虽然这样做了,…...
2024/5/2 12:44:56 - python串口收发数据
python串口收发数据一、虚拟串口安装二、利用虚拟串口工具,将com2和com3串口连接起来三、程序示例 一、虚拟串口安装 链接:https://pan.baidu.com/s/1_0bwdg-XYFNYelWui7WaZA 提取码:prnz 安装过程见:虚拟串口安装与破解 二、利用虚拟串口工具,将com2和com3串口连接起来 如…...
2024/4/16 14:23:26 - VSCode彩虹屁:你就是因为想太多如果,所以才交不到女朋友吧?
最近一款VSCode内置语音插件rainbow fart横空出世,rainbow fart翻译过来就是彩虹屁,该插件的定位就是: 真*程序员鼓励师,在您枯燥的编程时刻,它可以根据代码关键字播放贴近代码意义的可爱的女孩子的真人语音, 夸你写代码牛逼!安装目前VSCode的插件商场已经上架这个插件了…...
2024/4/30 7:29:28 - 入门篇 | 亚马逊卖家如何利用YouTube自己寻找红人?
亚马逊刚起步,可能没有太多预算在红人费用上,那么小卖家自己怎么找YouTube红人呢?首先,可以在YouTube平台有效利用关键词。除了产品关键词,还可以利用产品大分类关键词以及深入分析产品功能,利用产品适用人群其他相关关键词来寻找红人。二是利用过滤功能筛选直接找频道、…...
2024/5/2 10:06:13 - 享受高质量的音频体验,这些卓越的mac音频管理软件不能错过~
想要简便的更改单个应用的音量和输出设备?一些mac音频控制工具必不可少,今天整理的这四款在音频控制管理方面堪称是神器,随时随地调整Mac的音频设备设置和级别。甚至可以将内置和第三方音频效果应用于Mac上的任何音频,话不多说来看看吧~ 享受高质量的音频体验,这些卓越的m…...
2024/4/16 14:23:26 - 公司短信平台上的2万块钱,瞬间就被黑光了
我是风筝,公众号「古时的风筝」,一个兼具深度与广度的程序员鼓励师,一个本打算写诗却写起了代码的田园码农! 文章会收录在 JavaNewBee ,还要更多文章合集。前两天的中午像往常一样热,太阳不知疲倦的在天空燃烧,热跑了云彩和鸟儿,马上就要点燃空气和我的脑神经。为我和电…...
2024/4/19 19:58:25 - 7.3冲击强压失利,比特币进一步走弱
资讯:1.上半年全国11省市出台区块链专项政策 “区块链+政务”被寄予厚望。2.比特币一度跌至9000美元,不过基本面仍然强健。行情:昨天文章中提到:今天凌晨比特币在上攻9300点失败后收9296点,回调至9230附近,从盘面来看,1小时线、4小时、6小时线都有下行的态势。做单的朋友…...
2024/4/16 14:23:26 - 亚马逊Prime Day或将于10月3日拉开序幕?
据卖家爆料,2020年亚马逊Prime Day大促或将定于10月举行,并发出一张与Prime Day有关的通知截图。截图显示↓↓↓通知显示,2020年亚马逊Prime Day FBA入库交付时间的截止日期定为2020年9月25日,Prime Day优惠券提交截止日期为会员日开始前1周,Prime Day秒杀申请报名截止日期…...
2024/4/26 12:41:34 - 给折腾ramdisk的朋友们一点建议
Ramdisk是什么,恐怕不需要我多说大家都知道。至于ramdisk有什么优点,百度一下你能看到因为ramsik有着很快的读写速度所以“放临时文件能加快速度”,“装软件可以秒开”等等各种优化的方法,比较犀利的言论还认为使用ramdisk可以延长续航时间,保护硬盘等等“高阶应用” 在此…...
2024/4/19 18:15:21 - Java 手机号 和邮箱 脱敏处理
WorkOrderEntity jobEntity = this.workOrderMapper.selectWorkOrderById(id);String phone=jobEntity.getReporterPhone(); //手机号脱敏处理phone = phone.replaceAll("(^\\d{3})\\d.*(\\d{4})", "$1****$2");String email=jobEntity.getReporterEmail()…...
2024/5/2 10:38:15 - QT笔记:键盘按下事件多次触发问题
问题 重写键盘按下事件,发现当键盘按下时,按键按下事件在不停的触发解决方法 利用QKeyEvent的成员函数:bool isAutoRepeat() const可以判断当前事件是否是重复事件...
2024/5/2 2:58:46 - C语言项目-超市销售系统
功能 数据存储结构 实现方法 采用的库 部分实现截图 功能 结算 会员手机号识别,对识别的会员进行商品打折,对商品总额进行计算。 营收金额 记录总营收金额与今日营收金额。 订单查找 对订单进行查找(基于时间) 商品管理 对商品进行添加 会员…...
2024/4/19 13:29:50 - mysql left join中on后加条件判断和where中加条件的区别
left join中关于where和on条件的几个知识点: 1.多表left join是会生成一张临时表,并返回给用户 2.where条件是针对最后生成的这张临时表进行过滤,过滤掉不符合where条件的记录,是真正的不符合就过滤掉。 3.on条件是对left join的右表进行条件过滤,但依然返回左表的所有行,…...
2024/4/16 14:23:51 - .Net面试简答题——每日掌握(二)
1.面向对象的三个特性?继承性:就是让一个类型的对象拥有另一个类型的对象的属性的方法。继承后,子类拥有父类的属性和方法。封装性:就是将数据和代码捆绑在一起,防止外界干扰。多态性:就是一个事物拥有不同形式的能力。2.C#中的委托是什么?事件是不是一种委托?事件和委…...
2024/4/16 14:23:36 - 【leetcode】-5. Longest Palindromic Substring最长回文子串
Longest Palindromic Substring题目动态规划python代码 题目 Given a string s, find the longest palindromic substring in s. You may assume that the maximum length of s is 1000. Example 1: Input: “babad” Output: “bab” Note: “aba” is also a valid answer. E…...
2024/4/16 14:24:53 - SQL核心语句,非常实用的小技巧
目录1.INSERTDELETEUPDATESELECT INTO 1.INSERT 向表中添加一个新记录。 例 : INSERT student(people1) VALUES (some data)以上语句是把字符串’some data’插入表student的people1字段中。将要被插入数据的字段的名字在第一个括号中指定,实际的数据在第二个括号中给出。 IN…...
2024/4/1 0:16:13 - 双系统安装(win10 + Ubuntu18.04)的博文推荐与收藏
双系统安装的教程 双系统安装后ubuntu卡死的解决方法 ubuntu18.04获取root权限并用root用户登录教程 感谢博主,教程很好用,亲测有效,推荐给大家!...
2024/4/16 14:24:33 - (C++/python)LeetCode 543. 二叉树的直径
题目描述: 给定一棵二叉树,你需要计算它的直径长度。一棵二叉树的直径长度是任意两个结点路径长度中的最大值。这条路径可能穿过也可能不穿过根结点。 示例 : 给定二叉树1/ \2 3/ \ 4 5 返回 3, 它的长度是路径 [4,2,1,3] 或者 [5,2,1,3]。 思路: 二叉树的直径:…...
2024/4/16 14:24:43 - 【Linux学习手册--新手必看篇】命令:groupdel
Linux笔记 ——Linux命令 【若对该知识点有更多想了解的,欢迎私信博主~~】 groupdel 说明 用于删除群组 语法 groupdel 群组名称注:如果有任何一个群组的使用者在线上的话就不能移除该群组,最好先移除使用者后再移除群组...
2024/5/2 7:57:00 - java中sleep、interrupt、wait、notify、join、yield用法
1) interrupt是Thread对象的方法,用于修改线程的打断状态为true(可以用isInterrupted()来获取),除此之外未做任何其他事,所以interrupt并不会去真正的打断某个线程的运行状态或杀死某个线程;但是,当本线程在sleep阻塞或者wait阻塞或者join阻塞(本质还会wait阻塞)时,如…...
2024/4/18 4:39:46
最新文章
- 十三、大模型项目部署与交付
1 硬件选型 CUDA 核心和 Tensor 核心 CUDA 核心:是NVIDIA开发的并行计算平台和编程模型,用于GPU上的能用计算,可做很多的工作。应用在游戏、图形渲染、天气预测和电影特效Tensor 核心:张量核心,专门设计用于深度学习…...
2024/5/2 14:12:42 - 梯度消失和梯度爆炸的一些处理方法
在这里是记录一下梯度消失或梯度爆炸的一些处理技巧。全当学习总结了如有错误还请留言,在此感激不尽。 权重和梯度的更新公式如下: w w − η ⋅ ∇ w w w - \eta \cdot \nabla w ww−η⋅∇w 个人通俗的理解梯度消失就是网络模型在反向求导的时候出…...
2024/3/20 10:50:27 - Java最短路径算法知识点(含面试大厂题和源码)
最短路径算法是计算机科学和图论中的核心问题之一,它旨在找到从一个顶点到另一个顶点或在所有顶点之间的最短路径。这个问题在多种实际应用中都非常重要,如网络路由、交通规划、社交网络分析等。以下是一些与最短路径算法相关的知识点: Dijks…...
2024/5/1 6:43:28 - 【教程】iOS如何抓取HTTP和HTTPS数据包经验分享
📱 在日常的App开发和研发调研中,对各类App进行深入的研究分析时,我们需要借助专业的抓包应用来协助工作。本文将介绍如何使用iOS手机抓包工具来获取HTTP和HTTPS数据包,并推荐一款实用的抓包应用——克魔助手,希望能够…...
2024/5/1 9:43:40 - 【外汇早评】美通胀数据走低,美元调整
原标题:【外汇早评】美通胀数据走低,美元调整昨日美国方面公布了新一期的核心PCE物价指数数据,同比增长1.6%,低于前值和预期值的1.7%,距离美联储的通胀目标2%继续走低,通胀压力较低,且此前美国一季度GDP初值中的消费部分下滑明显,因此市场对美联储后续更可能降息的政策…...
2024/5/1 17:30:59 - 【原油贵金属周评】原油多头拥挤,价格调整
原标题:【原油贵金属周评】原油多头拥挤,价格调整本周国际劳动节,我们喜迎四天假期,但是整个金融市场确实流动性充沛,大事频发,各个商品波动剧烈。美国方面,在本周四凌晨公布5月份的利率决议和新闻发布会,维持联邦基金利率在2.25%-2.50%不变,符合市场预期。同时美联储…...
2024/4/30 18:14:14 - 【外汇周评】靓丽非农不及疲软通胀影响
原标题:【外汇周评】靓丽非农不及疲软通胀影响在刚结束的周五,美国方面公布了新一期的非农就业数据,大幅好于前值和预期,新增就业重新回到20万以上。具体数据: 美国4月非农就业人口变动 26.3万人,预期 19万人,前值 19.6万人。 美国4月失业率 3.6%,预期 3.8%,前值 3…...
2024/4/29 2:29:43 - 【原油贵金属早评】库存继续增加,油价收跌
原标题:【原油贵金属早评】库存继续增加,油价收跌周三清晨公布美国当周API原油库存数据,上周原油库存增加281万桶至4.692亿桶,增幅超过预期的74.4万桶。且有消息人士称,沙特阿美据悉将于6月向亚洲炼油厂额外出售更多原油,印度炼油商预计将每日获得至多20万桶的额外原油供…...
2024/5/2 9:28:15 - 【外汇早评】日本央行会议纪要不改日元强势
原标题:【外汇早评】日本央行会议纪要不改日元强势近两日日元大幅走强与近期市场风险情绪上升,避险资金回流日元有关,也与前一段时间的美日贸易谈判给日本缓冲期,日本方面对汇率问题也避免继续贬值有关。虽然今日早间日本央行公布的利率会议纪要仍然是支持宽松政策,但这符…...
2024/4/27 17:58:04 - 【原油贵金属早评】欧佩克稳定市场,填补伊朗问题的影响
原标题:【原油贵金属早评】欧佩克稳定市场,填补伊朗问题的影响近日伊朗局势升温,导致市场担忧影响原油供给,油价试图反弹。此时OPEC表态稳定市场。据消息人士透露,沙特6月石油出口料将低于700万桶/日,沙特已经收到石油消费国提出的6月份扩大出口的“适度要求”,沙特将满…...
2024/4/27 14:22:49 - 【外汇早评】美欲与伊朗重谈协议
原标题:【外汇早评】美欲与伊朗重谈协议美国对伊朗的制裁遭到伊朗的抗议,昨日伊朗方面提出将部分退出伊核协议。而此行为又遭到欧洲方面对伊朗的谴责和警告,伊朗外长昨日回应称,欧洲国家履行它们的义务,伊核协议就能保证存续。据传闻伊朗的导弹已经对准了以色列和美国的航…...
2024/4/28 1:28:33 - 【原油贵金属早评】波动率飙升,市场情绪动荡
原标题:【原油贵金属早评】波动率飙升,市场情绪动荡因中美贸易谈判不安情绪影响,金融市场各资产品种出现明显的波动。随着美国与中方开启第十一轮谈判之际,美国按照既定计划向中国2000亿商品征收25%的关税,市场情绪有所平复,已经开始接受这一事实。虽然波动率-恐慌指数VI…...
2024/4/30 9:43:09 - 【原油贵金属周评】伊朗局势升温,黄金多头跃跃欲试
原标题:【原油贵金属周评】伊朗局势升温,黄金多头跃跃欲试美国和伊朗的局势继续升温,市场风险情绪上升,避险黄金有向上突破阻力的迹象。原油方面稍显平稳,近期美国和OPEC加大供给及市场需求回落的影响,伊朗局势并未推升油价走强。近期中美贸易谈判摩擦再度升级,美国对中…...
2024/4/27 17:59:30 - 【原油贵金属早评】市场情绪继续恶化,黄金上破
原标题:【原油贵金属早评】市场情绪继续恶化,黄金上破周初中国针对于美国加征关税的进行的反制措施引发市场情绪的大幅波动,人民币汇率出现大幅的贬值动能,金融市场受到非常明显的冲击。尤其是波动率起来之后,对于股市的表现尤其不安。隔夜美国股市出现明显的下行走势,这…...
2024/4/25 18:39:16 - 【外汇早评】美伊僵持,风险情绪继续升温
原标题:【外汇早评】美伊僵持,风险情绪继续升温昨日沙特两艘油轮再次发生爆炸事件,导致波斯湾局势进一步恶化,市场担忧美伊可能会出现摩擦生火,避险品种获得支撑,黄金和日元大幅走强。美指受中美贸易问题影响而在低位震荡。继5月12日,四艘商船在阿联酋领海附近的阿曼湾、…...
2024/4/28 1:34:08 - 【原油贵金属早评】贸易冲突导致需求低迷,油价弱势
原标题:【原油贵金属早评】贸易冲突导致需求低迷,油价弱势近日虽然伊朗局势升温,中东地区几起油船被袭击事件影响,但油价并未走高,而是出于调整结构中。由于市场预期局势失控的可能性较低,而中美贸易问题导致的全球经济衰退风险更大,需求会持续低迷,因此油价调整压力较…...
2024/4/26 19:03:37 - 氧生福地 玩美北湖(上)——为时光守候两千年
原标题:氧生福地 玩美北湖(上)——为时光守候两千年一次说走就走的旅行,只有一张高铁票的距离~ 所以,湖南郴州,我来了~ 从广州南站出发,一个半小时就到达郴州西站了。在动车上,同时改票的南风兄和我居然被分到了一个车厢,所以一路非常愉快地聊了过来。 挺好,最起…...
2024/4/29 20:46:55 - 氧生福地 玩美北湖(中)——永春梯田里的美与鲜
原标题:氧生福地 玩美北湖(中)——永春梯田里的美与鲜一觉醒来,因为大家太爱“美”照,在柳毅山庄去寻找龙女而错过了早餐时间。近十点,向导坏坏还是带着饥肠辘辘的我们去吃郴州最富有盛名的“鱼头粉”。说这是“十二分推荐”,到郴州必吃的美食之一。 哇塞!那个味美香甜…...
2024/4/30 22:21:04 - 氧生福地 玩美北湖(下)——奔跑吧骚年!
原标题:氧生福地 玩美北湖(下)——奔跑吧骚年!让我们红尘做伴 活得潇潇洒洒 策马奔腾共享人世繁华 对酒当歌唱出心中喜悦 轰轰烈烈把握青春年华 让我们红尘做伴 活得潇潇洒洒 策马奔腾共享人世繁华 对酒当歌唱出心中喜悦 轰轰烈烈把握青春年华 啊……啊……啊 两…...
2024/5/1 4:32:01 - 扒开伪装医用面膜,翻六倍价格宰客,小姐姐注意了!
原标题:扒开伪装医用面膜,翻六倍价格宰客,小姐姐注意了!扒开伪装医用面膜,翻六倍价格宰客!当行业里的某一品项火爆了,就会有很多商家蹭热度,装逼忽悠,最近火爆朋友圈的医用面膜,被沾上了污点,到底怎么回事呢? “比普通面膜安全、效果好!痘痘、痘印、敏感肌都能用…...
2024/4/27 23:24:42 - 「发现」铁皮石斛仙草之神奇功效用于医用面膜
原标题:「发现」铁皮石斛仙草之神奇功效用于医用面膜丽彦妆铁皮石斛医用面膜|石斛多糖无菌修护补水贴19大优势: 1、铁皮石斛:自唐宋以来,一直被列为皇室贡品,铁皮石斛生于海拔1600米的悬崖峭壁之上,繁殖力差,产量极低,所以古代仅供皇室、贵族享用 2、铁皮石斛自古民间…...
2024/4/28 5:48:52 - 丽彦妆\医用面膜\冷敷贴轻奢医学护肤引导者
原标题:丽彦妆\医用面膜\冷敷贴轻奢医学护肤引导者【公司简介】 广州华彬企业隶属香港华彬集团有限公司,专注美业21年,其旗下品牌: 「圣茵美」私密荷尔蒙抗衰,产后修复 「圣仪轩」私密荷尔蒙抗衰,产后修复 「花茵莳」私密荷尔蒙抗衰,产后修复 「丽彦妆」专注医学护…...
2024/4/30 9:42:22 - 广州械字号面膜生产厂家OEM/ODM4项须知!
原标题:广州械字号面膜生产厂家OEM/ODM4项须知!广州械字号面膜生产厂家OEM/ODM流程及注意事项解读: 械字号医用面膜,其实在我国并没有严格的定义,通常我们说的医美面膜指的应该是一种「医用敷料」,也就是说,医用面膜其实算作「医疗器械」的一种,又称「医用冷敷贴」。 …...
2024/5/2 9:07:46 - 械字号医用眼膜缓解用眼过度到底有无作用?
原标题:械字号医用眼膜缓解用眼过度到底有无作用?医用眼膜/械字号眼膜/医用冷敷眼贴 凝胶层为亲水高分子材料,含70%以上的水分。体表皮肤温度传导到本产品的凝胶层,热量被凝胶内水分子吸收,通过水分的蒸发带走大量的热量,可迅速地降低体表皮肤局部温度,减轻局部皮肤的灼…...
2024/4/30 9:42:49 - 配置失败还原请勿关闭计算机,电脑开机屏幕上面显示,配置失败还原更改 请勿关闭计算机 开不了机 这个问题怎么办...
解析如下:1、长按电脑电源键直至关机,然后再按一次电源健重启电脑,按F8健进入安全模式2、安全模式下进入Windows系统桌面后,按住“winR”打开运行窗口,输入“services.msc”打开服务设置3、在服务界面,选中…...
2022/11/19 21:17:18 - 错误使用 reshape要执行 RESHAPE,请勿更改元素数目。
%读入6幅图像(每一幅图像的大小是564*564) f1 imread(WashingtonDC_Band1_564.tif); subplot(3,2,1),imshow(f1); f2 imread(WashingtonDC_Band2_564.tif); subplot(3,2,2),imshow(f2); f3 imread(WashingtonDC_Band3_564.tif); subplot(3,2,3),imsho…...
2022/11/19 21:17:16 - 配置 已完成 请勿关闭计算机,win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机...
win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机”问题的解决方法在win7系统关机时如果有升级系统的或者其他需要会直接进入一个 等待界面,在等待界面中我们需要等待操作结束才能关机,虽然这比较麻烦,但是对系统进行配置和升级…...
2022/11/19 21:17:15 - 台式电脑显示配置100%请勿关闭计算机,“准备配置windows 请勿关闭计算机”的解决方法...
有不少用户在重装Win7系统或更新系统后会遇到“准备配置windows,请勿关闭计算机”的提示,要过很久才能进入系统,有的用户甚至几个小时也无法进入,下面就教大家这个问题的解决方法。第一种方法:我们首先在左下角的“开始…...
2022/11/19 21:17:14 - win7 正在配置 请勿关闭计算机,怎么办Win7开机显示正在配置Windows Update请勿关机...
置信有很多用户都跟小编一样遇到过这样的问题,电脑时发现开机屏幕显现“正在配置Windows Update,请勿关机”(如下图所示),而且还需求等大约5分钟才干进入系统。这是怎样回事呢?一切都是正常操作的,为什么开时机呈现“正…...
2022/11/19 21:17:13 - 准备配置windows 请勿关闭计算机 蓝屏,Win7开机总是出现提示“配置Windows请勿关机”...
Win7系统开机启动时总是出现“配置Windows请勿关机”的提示,没过几秒后电脑自动重启,每次开机都这样无法进入系统,此时碰到这种现象的用户就可以使用以下5种方法解决问题。方法一:开机按下F8,在出现的Windows高级启动选…...
2022/11/19 21:17:12 - 准备windows请勿关闭计算机要多久,windows10系统提示正在准备windows请勿关闭计算机怎么办...
有不少windows10系统用户反映说碰到这样一个情况,就是电脑提示正在准备windows请勿关闭计算机,碰到这样的问题该怎么解决呢,现在小编就给大家分享一下windows10系统提示正在准备windows请勿关闭计算机的具体第一种方法:1、2、依次…...
2022/11/19 21:17:11 - 配置 已完成 请勿关闭计算机,win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机”的解决方法...
今天和大家分享一下win7系统重装了Win7旗舰版系统后,每次关机的时候桌面上都会显示一个“配置Windows Update的界面,提示请勿关闭计算机”,每次停留好几分钟才能正常关机,导致什么情况引起的呢?出现配置Windows Update…...
2022/11/19 21:17:10 - 电脑桌面一直是清理请关闭计算机,windows7一直卡在清理 请勿关闭计算机-win7清理请勿关机,win7配置更新35%不动...
只能是等着,别无他法。说是卡着如果你看硬盘灯应该在读写。如果从 Win 10 无法正常回滚,只能是考虑备份数据后重装系统了。解决来方案一:管理员运行cmd:net stop WuAuServcd %windir%ren SoftwareDistribution SDoldnet start WuA…...
2022/11/19 21:17:09 - 计算机配置更新不起,电脑提示“配置Windows Update请勿关闭计算机”怎么办?
原标题:电脑提示“配置Windows Update请勿关闭计算机”怎么办?win7系统中在开机与关闭的时候总是显示“配置windows update请勿关闭计算机”相信有不少朋友都曾遇到过一次两次还能忍但经常遇到就叫人感到心烦了遇到这种问题怎么办呢?一般的方…...
2022/11/19 21:17:08 - 计算机正在配置无法关机,关机提示 windows7 正在配置windows 请勿关闭计算机 ,然后等了一晚上也没有关掉。现在电脑无法正常关机...
关机提示 windows7 正在配置windows 请勿关闭计算机 ,然后等了一晚上也没有关掉。现在电脑无法正常关机以下文字资料是由(历史新知网www.lishixinzhi.com)小编为大家搜集整理后发布的内容,让我们赶快一起来看一下吧!关机提示 windows7 正在配…...
2022/11/19 21:17:05 - 钉钉提示请勿通过开发者调试模式_钉钉请勿通过开发者调试模式是真的吗好不好用...
钉钉请勿通过开发者调试模式是真的吗好不好用 更新时间:2020-04-20 22:24:19 浏览次数:729次 区域: 南阳 > 卧龙 列举网提醒您:为保障您的权益,请不要提前支付任何费用! 虚拟位置外设器!!轨迹模拟&虚拟位置外设神器 专业用于:钉钉,外勤365,红圈通,企业微信和…...
2022/11/19 21:17:05 - 配置失败还原请勿关闭计算机怎么办,win7系统出现“配置windows update失败 还原更改 请勿关闭计算机”,长时间没反应,无法进入系统的解决方案...
前几天班里有位学生电脑(windows 7系统)出问题了,具体表现是开机时一直停留在“配置windows update失败 还原更改 请勿关闭计算机”这个界面,长时间没反应,无法进入系统。这个问题原来帮其他同学也解决过,网上搜了不少资料&#x…...
2022/11/19 21:17:04 - 一个电脑无法关闭计算机你应该怎么办,电脑显示“清理请勿关闭计算机”怎么办?...
本文为你提供了3个有效解决电脑显示“清理请勿关闭计算机”问题的方法,并在最后教给你1种保护系统安全的好方法,一起来看看!电脑出现“清理请勿关闭计算机”在Windows 7(SP1)和Windows Server 2008 R2 SP1中,添加了1个新功能在“磁…...
2022/11/19 21:17:03 - 请勿关闭计算机还原更改要多久,电脑显示:配置windows更新失败,正在还原更改,请勿关闭计算机怎么办...
许多用户在长期不使用电脑的时候,开启电脑发现电脑显示:配置windows更新失败,正在还原更改,请勿关闭计算机。。.这要怎么办呢?下面小编就带着大家一起看看吧!如果能够正常进入系统,建议您暂时移…...
2022/11/19 21:17:02 - 还原更改请勿关闭计算机 要多久,配置windows update失败 还原更改 请勿关闭计算机,电脑开机后一直显示以...
配置windows update失败 还原更改 请勿关闭计算机,电脑开机后一直显示以以下文字资料是由(历史新知网www.lishixinzhi.com)小编为大家搜集整理后发布的内容,让我们赶快一起来看一下吧!配置windows update失败 还原更改 请勿关闭计算机&#x…...
2022/11/19 21:17:01 - 电脑配置中请勿关闭计算机怎么办,准备配置windows请勿关闭计算机一直显示怎么办【图解】...
不知道大家有没有遇到过这样的一个问题,就是我们的win7系统在关机的时候,总是喜欢显示“准备配置windows,请勿关机”这样的一个页面,没有什么大碍,但是如果一直等着的话就要两个小时甚至更久都关不了机,非常…...
2022/11/19 21:17:00 - 正在准备配置请勿关闭计算机,正在准备配置windows请勿关闭计算机时间长了解决教程...
当电脑出现正在准备配置windows请勿关闭计算机时,一般是您正对windows进行升级,但是这个要是长时间没有反应,我们不能再傻等下去了。可能是电脑出了别的问题了,来看看教程的说法。正在准备配置windows请勿关闭计算机时间长了方法一…...
2022/11/19 21:16:59 - 配置失败还原请勿关闭计算机,配置Windows Update失败,还原更改请勿关闭计算机...
我们使用电脑的过程中有时会遇到这种情况,当我们打开电脑之后,发现一直停留在一个界面:“配置Windows Update失败,还原更改请勿关闭计算机”,等了许久还是无法进入系统。如果我们遇到此类问题应该如何解决呢࿰…...
2022/11/19 21:16:58 - 如何在iPhone上关闭“请勿打扰”
Apple’s “Do Not Disturb While Driving” is a potentially lifesaving iPhone feature, but it doesn’t always turn on automatically at the appropriate time. For example, you might be a passenger in a moving car, but your iPhone may think you’re the one dri…...
2022/11/19 21:16:57