ROS笔记本
创建工作空间
下面我们开始创建一个catkin 工作空间:
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
即使这个工作空间是空的(在’src’目录中没有任何软件包,只有一个CMakeLists.txt链接文件),你依然可以编译它:
$ cd ~/catkin_ws/ (在工作空间目录进行编译)
$ catkin_make
catkin_make命令在catkin 工作空间中是一个非常方便的工具。如果你查看一下当前目录应该能看到’build’和’devel’这两个文件夹。在’devel’文件夹里面你可以看到几个setup.*sh文件。source这些文件中的任何一个都可以将当前工作空间设置在ROS工作环境的最顶层
接下来首先source一下新生成的setup.*sh文件:
$ source devel/setup.bash (打开新的终端后使用roscd命令发现找不到你自己创建的package,这是因为你的source devel/setup.bash并没有写进~/.bashrc中,新的终端下需要重新source)
要想保证工作空间已配置正确需确保ROS_PACKAGE_PATH环境变量包含你的工作空间目录,采用以下命令查看
echo $ROS_PACKAGE_PATH
/home//catkin_ws/src:/opt/ros/indigo/share:/opt/ros/indigo/stacks
ROS文件系统介绍
快速了解文件系统概念
Packages: 软件包,是ROS应用程序代码的组织单元,每个软件包都可以包含程序库、可执行文件、脚本或者其它手动创建的东西。Manifest (package.xml): 清单,是对于'软件包'相关信息的描述,用于定义软件包相关元信息之间的依赖关系,这些信息包括版本、维护者和许可协议等。
rospack允许你获取软件包的有关信息
rospack find [包名称] 可以返回软件包的路径信息。
roscd是rosbash命令集中的一部分,它允许你直接切换(cd)工作目录到某个软件包或者软件包集当中。
roscd [本地包名称[/子目录]]
像ROS中的其它工具一样,roscd只能切换到那些路径已经包含在ROS_PACKAGE_PATH环境变量中的软件包,要查看ROS_PACKAGE_PATH中包含的路径可以输入:
$ echo $ROS_PACKAGE_PATH
rosls是rosbash命令集中的一部分,它允许你直接按软件包的名称而不是绝对路径执行ls命令(罗列目录)。
用法:
rosls [本地包名称[/子目录]]
创建ROS程序包
一个catkin程序包由什么组成?
一个程序包要想称为catkin程序包必须符合以下要求:
1 该程序包必须包含catkin compliant package.xml文件
这个package.xml文件提供有关程序包的元信息。
2 程序包必须包含一个catkin 版本的CMakeLists.txt文件,而Catkin metapackages中必须包含一个对CMakeList.txt文件的引用。
3*每个目录下只能有一个程序包。
这意味着在同一个目录下不能有嵌套的或者多个程序包存在。*
最简单的程序包也许看起来就像这样:
my_package/CMakeLists.txtpackage.xml开发catkin程序包的一个推荐方法是使用catkin工作空间,但是你也可以单独开发(standalone)catkin 软件包。一个简单的工作空间也许看起来像这样:workspace_folder/ -- WORKSPACEsrc/ -- SOURCE SPACECMakeLists.txt -- 'Toplevel' CMake file, provided by catkinpackage_1/CMakeLists.txt -- CMakeLists.txt file for package_1package.xml -- Package manifest for package_1...package_n/CMakeLists.txt -- CMakeLists.txt file for package_npackage.xml -- Package manifest for package_n
创建一个catkin程序包
首先切换到之前通过创建catkin工作空间教程创建的catkin工作空间中的src目录下:
$ cd ~/catkin_ws/src
现在使用catkin_create_pkg命令来创建一个名为’beginner_tutorials’的新程序包,这个程序包依赖于std_msgs、roscpp和rospy:
$ catkin_create_pkg beginner_tutorials std_msgs rospy roscpp
这将会创建一个名为beginner_tutorials的文件夹,这个文件夹里面包含一个package.xml文件和一个CMakeLists.txt文件,这两个文件都已经自动包含了部分你在执行catkin_create_pkg命令时提供的信息。
catkin_create_pkg命令会要求你输入package_name,如果有需要你还可以在后面添加一些需要依赖的其它程序包:
#catkin_create_pkg <package_name> [depend1] [depend2] [depend3]
程序包依赖关系
一级依赖
之前在使用catkin_create_pkg命令时提供了几个程序包作为依赖包,现在我们可以使用rospack命令工具来查看一级依赖包。
$ rospack depends1 beginner_tutorials
std_msgs
rospy
roscpp
一个程序包还可以有好几个间接的依赖包,幸运的是使用rospack可以递归检测出所有的依赖包。
$ rospack depends beginner_tutorials
自定义你的程序包
自定义 package.xml
主要修改依赖关系
自定义 CMakeLists.txt
编译ROS程序包
使用 catkin_make
catkin_make 是一个命令行工具,它简化了catkin的标准工作流程。你可以认为catkin_make是在CMake标准工作流程中依次调用了cmake 和 make。
#在一个CMake项目里
$ mkdir build
$ cd build
$ cmake …
$ make
$ make install # (可选)
每个CMake工程在编译时都会执行这个操作过程。相反,多个catkin项目可以放在工作空间中一起编译,工作流程如下:
#In a catkin workspace
$ catkin_make
$ catkin_make install # (可选)
如果你的源代码不在默认工作空间中(~/catkin_ws/src),比如说存放在了my_src中,那么你可以这样来使用catkin_make:
In a catkin workspace
$ catkin_make --source my_src
build 目录是build space的默认所在位置,同时cmake 和 make也是在这里被调用来配置并编译你的程序包。devel (development)目录是devel space的默认所在位置, 同时也是在你安装程序包之前存放可执行文件和库文件的地方。
理解 ROS节点
节点
一个节点其实只不过是ROS程序包中的一个可执行文件。ROS节点可以使用ROS客户库与其他节点通信。节点可以发布或接收一个话题。节点也可以提供或使用某种服务。
(以遥控器控制小乌龟为例:我们编写一个节点,这个节点有订阅器和发布器,订阅器订阅遥控器的话题,接受遥控器的数据,然后经过处理发布到另一个小乌龟也订阅的话题上,这样小乌龟就可以遥控啦。暂时的理解,之后更新)
(节点是ros中非常重要的一个概念,为了帮助初学者理解这个概念,这里举一个通俗的例子:
例如,咱们有一个机器人,和一个遥控器,那么这个机器人和遥控器开始工作后,就是两个节点。遥控器起到了下达指 令的作用;机器人负责监听遥控器下达的指令,完成相应动作。从这里我们可以看出,节点是一个能执行特定工作任 务的工作单元,并且能够相互通信,从而实现一个机器人系统整体的功能。在这里我们把遥控器和机器人简单定义为两个节点,实际上在机器人中根据控制器、传感器、执行机构等不同组成模块,还可以将其进一步细分为更多的节点,这个是根据用户编写的程序来定义的。)
客户端库
ROS客户端库允许使用不同编程语言编写的节点之间互相通信:
rospy = python 客户端库
roscpp = c++ 客户端库
roscore
roscore 是你在运行所有ROS程序前首先要运行的命令。
如果 roscore 运行后无法正常初始化,很有可能是存在网络配置问题。参见[网络设置——单机设置](http://www.ros.org/wiki/ROS/NetworkSetup#Single_machine_configuration)
如果 roscore 不能初始化并提示缺少权限,这可能是因为~/.ros文件夹归属于root用户(只有root用户才能访问),修改该文件夹的用户归属关系:
$ sudo chown -R <your_username> ~/.ros
使用rosnode
当打开一个新的终端时,你的运行环境会复位,同时你的~/.bashrc文件会复原。如果你在运行类似于rosnode的指令时出现一些问题,也许你需要添加
一些环境设置文件到你的~/.bashrc或者手动重新配置他们。 (source 一下)
rosnode list 指令列出活跃的节点:
$ rosnode list
你会看到:
/rosout
这表示当前只有一个节点在运行: rosout。因为这个节点用于收集和记录节点调试输出信息,所以它总是在运行的。
rosnode info 命令返回的是关于一个特定节点的信息。
使用 rosrun
rosrun 允许你使用包名直接运行一个包内的节点(而不需要知道这个包的路径)。
用法:
$ rosrun [package_name] [node_name]
rosrun turtlesim turtlesim_node(怎么知道一个包有哪些节点,使用TAB键)
ROS的一个强大特性就是你可以通过命令行重新配置名称。
使用Remapping Argument改变节点名称:
$ rosrun turtlesim turtlesim_node __name:=my_turtle
清除rosnode列表,通过: $ rosnode cleanup (应该是清除已经不再运行的节点)
另外一个 rosnode 指令, ping, 来测试:
$ rosnode ping my_turtle
理解ROS话题
ROS Topics
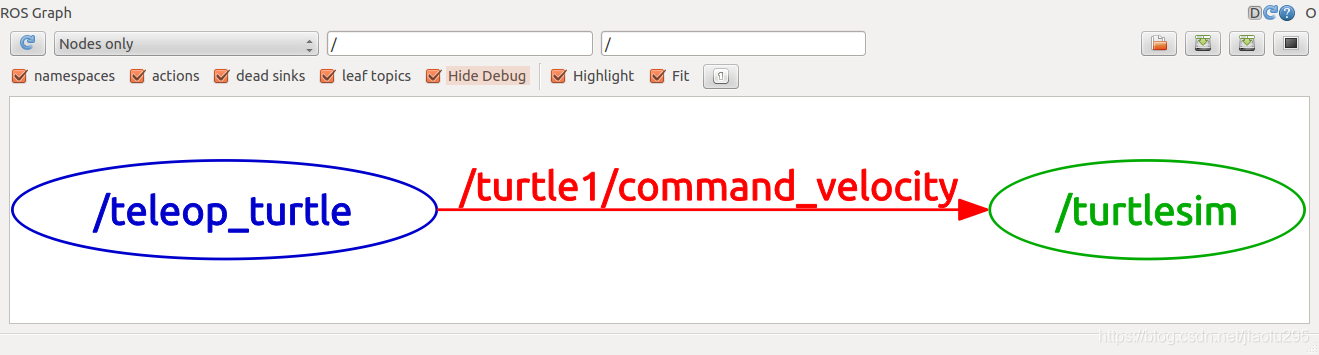
turtlesim_node节点和turtle_teleop_key节点之间是通过一个ROS话题来互相通信的。turtle_teleop_key在一个话题上发布按键输入消息,而turtlesim则订阅该话题以接收该消息。
使用 rqt_graph
rqt_graph能够创建一个显示当前系统运行情况的动态图形。rqt_graph是rqt程序包中的一部分。如果你没有安装,请通过以下命令来安装:
$ sudo apt-get install ros-<distro>-rqt
$ sudo apt-get install ros-<distro>-rqt-common-plugins
请使用你的ROS版本名称(比如fuerte、groovy、hydro等)来替换掉。
在一个新终端中运行:
$ rosrun rqt_graph rqt_graph
rostopic
rostopic is a command-line tool for printing information about ROS Topics.
Commands:
rostopic bw display bandwidth used by topic
rostopic delay display delay of topic from timestamp in header
rostopic echo print messages to screen
rostopic find find topics by type
rostopic hz display publishing rate of topic
rostopic info print information about active topic
rostopic list list active topics
rostopic pub publish data to topic
rostopic type print topic or field type
ROS Messages
话题之间的通信是通过在节点之间发送ROS消息实现的。对于发布器(turtle_teleop_key)和订阅器(turtulesim_node)之间的通信,发布器和订阅器之间必须发送和接收相同类型的消息。
这意味着话题的类型是由发布在它上面的消息类型决定的。使用rostopic type命令可以查看发布在某个话题上的消息类型。
使用 rostopic type
rostopic type 命令用来查看所发布话题的消息类型。
rostopic type /turtle1/cmd_vel
你应该会看到:
geometry_msgs/Twist
我们可以使用rosmsg命令来查看消息的详细情况
rosmsg show geometry_msgs/Twist
geometry_msgs/Vector3 linearfloat64 xfloat64 yfloat64 z
geometry_msgs/Vector3 angularfloat64 xfloat64 yfloat64 z
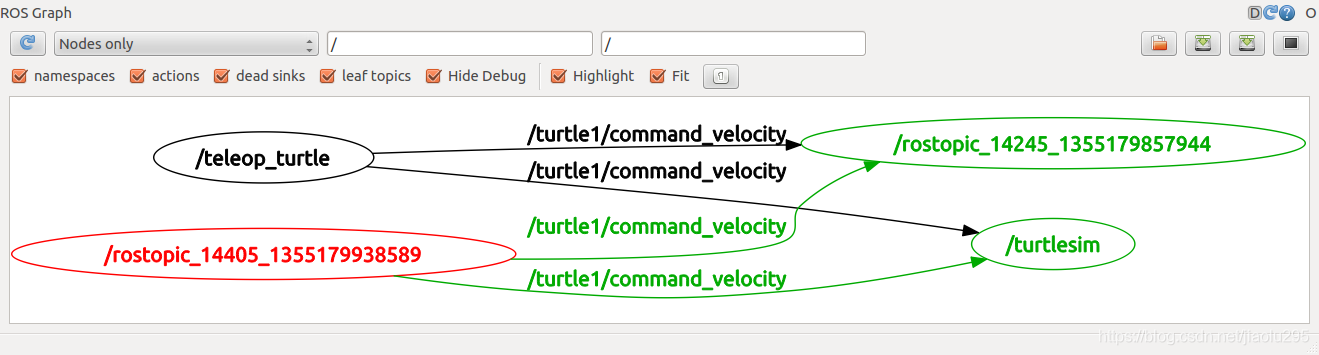
使用 rostopic pub
rostopic pub可以把数据发布到当前某个正在广播的话题上。
用法:
rostopic pub [topic] [msg_type] [args]
$ rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
这是一个非常复杂的例子,因此让我们来详细分析一下其中的每一个参数。
rostopic pub这条命令将会发布消息到某个给定的话题。 -1(单个破折号)这个参数选项使rostopic发布一条消息后马上退出。 /turtle1/command_velocity这是消息所发布到的话题名称。 turtlesim/Velocity这是所发布消息的类型。 --(双破折号)这会告诉命令选项解析器接下来的参数部分都不是命令选项。这在参数里面包含有破折号-(比如负号)时是必须要添加的。2.0 1.8正如之前提到的,在一个turtlesim/Velocity消息里面包含有两个浮点型元素:linear和angular。在本例中,2.0是linear的值,1.8是angular的值。这些参数其实是按照YAML语法格式编写的,这在YAML文档中有更多的描述。
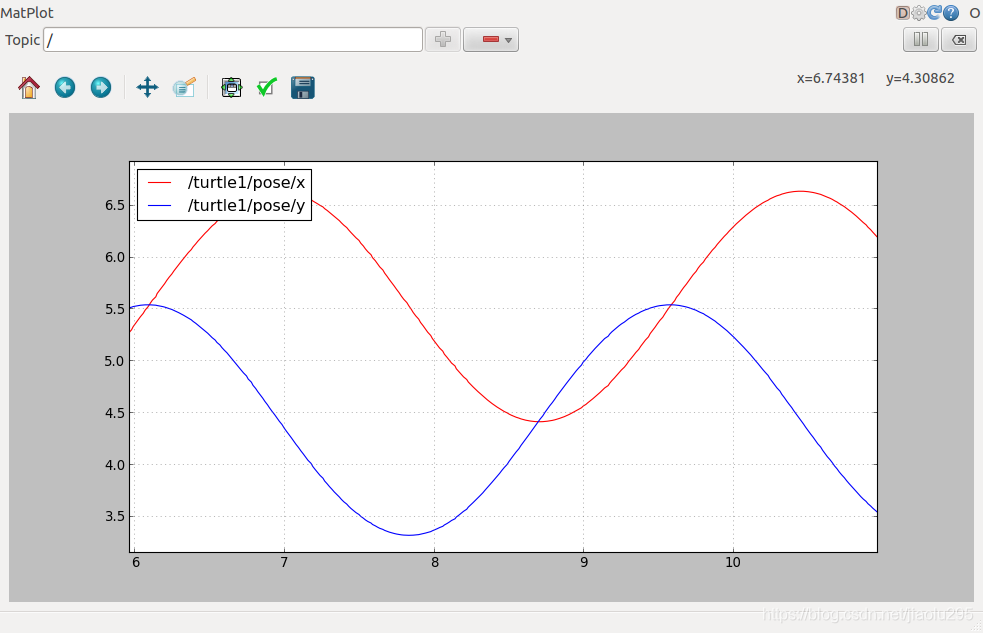
使用 rqt_plot
rqt_plot命令可以实时显示一个发布到某个话题上的数据变化图形。这里我们将使用rqt_plot命令来绘制正在发布到/turtle1/pose话题上的数据变化图形。首先,在一个新终端中运行rqt_plot命令:
$ rosrun rqt_plot rqt_plot
这会弹出一个新窗口,在窗口左上角的一个文本框里面你可以添加需要绘制的话题。在里面输入/turtle1/pose/x后之前处于禁用状态的加号按钮将会被使能变亮。按一下该按钮,并对/turtle1/pose/y重复相同的过程。现在你会在图形中看到turtle的x-y位置坐标图。
理解ROS服务和参数
ROS Services
服务(services)是节点之间通讯的另一种方式。服务允许节点发送请求(request) 并获得一个响应(response)
使用rosservice
rosservice可以很轻松的使用 ROS 客户端/服务器框架提供的服务。rosservice提供了很多可以在topic上使用的命令,如下所示:
使用方法:
rosservice list 输出可用服务的信息
rosservice call 调用带参数的服务
rosservice type 输出服务类型
rosservice find 依据类型寻找服务find services by service type
rosservice uri 输出服务的ROSRPC uri
rosservice list
$ rosservice list
list 命令显示turtlesim节点提供了9个服务:重置(reset), 清除(clear), 再生(spawn), 终止(kill), turtle1/set_pen, /turtle1/teleport_absolute, /turtle1/teleport_relative, turtlesim/get_loggers, and turtlesim/set_logger_level. 同时还有另外两个rosout节点提供的服务: /rosout/get_loggers and /rosout/set_logger_level.
/clear
/kill
/reset
/rosout/get_loggers
/rosout/set_logger_level
/spawn
/teleop_turtle/get_loggers
/teleop_turtle/set_logger_level
/turtle1/set_pen
/turtle1/teleport_absolute
/turtle1/teleport_relative
/turtlesim/get_loggers
/turtlesim/set_logger_level
我们使用rosservice type命令更进一步查看clear服务:
rosservice type
使用方法:
rosservice type [service]
我们来看看clear服务的类型:
$ rosservice type clear
std_srvs/Empty
服务的类型为空(empty),这表明在调用这个服务是不需要参数(比如,请求不需要发送数据,响应也没有数据)。下面我们使用rosservice call命令调用服务:
rosservice call
使用方法:
rosservice call [service] [args]
因为服务类型是空,所以进行无参数调用:
$ rosservice call clear
正如我们所期待的,服务清除了turtlesim_node的背景上的轨迹。
通过查看再生(spawn)服务的信息,我们来了解带参数的服务:
$ rosservice type spawn| rossrv show
float32 x
float32 y
float32 theta
string name
---
string name
这个服务使得我们可以在给定的位置和角度生成一只新的乌龟。名字参数是可选的,这里我们不设具体的名字,让turtlesim自动创建一个。
$ rosservice call spawn 2 2 0.2 ""
服务返回了新产生的乌龟的名字:
name: turtle2
Using rosparam
rosparam使得我们能够存储并操作ROS 参数服务器(Parameter Server)上的数据。参数服务器能够存储整型、浮点、布尔、字符串、字典和列表等数据类型。rosparam使用YAML标记语言的语法。一般而言,YAML的表述很自然:1 是整型, 1.0 是浮点型, one是字符串, true是布尔, [1, 2, 3]是整型列表, {a: b, c: d}是字典. rosparam有很多指令可以用来操作参数,如下所示:
使用方法:
rosparam set 设置参数
rosparam get 获取参数
rosparam load 从文件读取参数
rosparam dump 向文件中写入参数
rosparam delete 删除参数
rosparam list 列出参数名
我们来看看现在参数服务器上都有哪些参数:
rosparam list
$ rosparam list
我们可以看到turtlesim节点在参数服务器上有3个参数用于设定背景颜色:
/background_b
/background_g
/background_r
/roslaunch/uris/aqy:51932
/run_id
rosparam set and rosparam get
rosparam set [param_name]
rosparam get [param_name]
现在我们修改背景颜色的红色通道:
$ rosparam set background_r 150
上述指令修改了参数的值,现在我们调用清除服务使得修改后的参数生效:
$ rosservice call clear
现在我们来查看参数服务器上的参数值——获取背景的绿色通道的值:
$ rosparam get background_g
86
我们可以使用rosparam get /来显示参数服务器上的所有内容:
$ rosparam get /
background_b: 255
background_g: 86
background_r: 150
roslaunch:uris: {'aqy:51932': 'http://aqy:51932/'}
run_id: e07ea71e-98df-11de-8875-001b21201aa8
你可能希望存储这些信息以备今后重新读取。这通过rosparam很容易就可以实现:
rosparam dump and rosparam load
使用方法:
rosparam dump [file_name]
rosparam load [file_name] [namespace]
现在我们将所有的参数写入params.yaml文件:
$ rosparam dump params.yaml
你甚至可以将yaml文件重载入新的命名空间,比如说copy空间:
$ rosparam load params.yaml copy
$ rosparam get copy/background_b
255
使用 rqt_console 和 roslaunch
rqt_console属于ROS日志框架(logging framework)的一部分,用来显示节点的输出信息。rqt_logger_level允许我们修改节点运行时输出信息的日志等级(logger levels)(包括 DEBUG、WARN、INFO和ERROR)。
现在让我们来看一下turtlesim在rqt_console中的输出信息,同时在rqt_logger_level中修改日志等级。在启动turtlesim之前先在另外两个新终端中运行rqt_console和rqt_logger_level:
$ rosrun rqt_console rqt_console
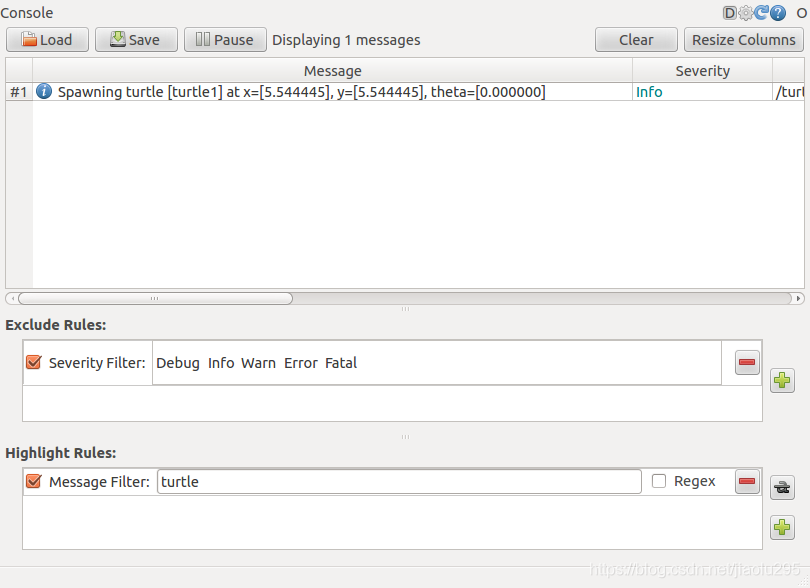
$ rosrun rqt_logger_level rqt_logger_level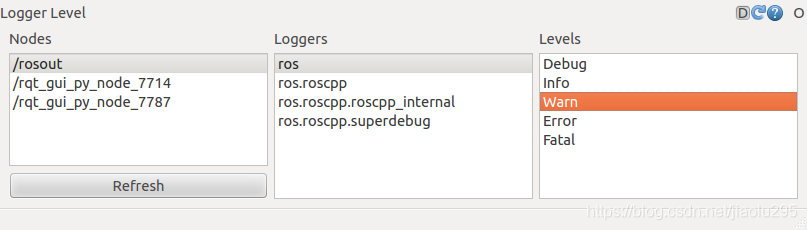
日志等级说明
日志等级按以下优先顺序排列:
Fatal
Error
Warn
Info
Debug
Fatal是最高优先级,Debug是最低优先级。通过设置日志等级你可以获取该等级及其以上优先等级的所有日志消息。比如,将日志等级设为Warn时,你会得到Warn、Error和Fatal这三个等级的所有日志消息。
使用roslaunch
roslaunch可以用来启动定义在launch文件中的多个节点。
用法:
$ roslaunch [package] [filename.launch]
先切换到beginner_tutorials程序包目录下:
$ roscd beginner_tutorials
然后创建一个launch文件夹:
$ mkdir launch
$ cd launch
现在我们来创建一个名为turtlemimic.launch的launch文件并复制粘贴以下内容到该文件里面:
<launch><group ns="turtlesim1"><node pkg="turtlesim" name="sim" type="turtlesim_node"/></group><group ns="turtlesim2"><node pkg="turtlesim" name="sim" type="turtlesim_node"/></group><node pkg="turtlesim" name="mimic" type="mimic"><remap from="input" to="turtlesim1/turtle1"/><remap from="output" to="turtlesim2/turtle1"/></node></launch>
使用rosed编辑ROS中的文件
rosed 是 rosbash 的一部分。利用它可以直接通过package名来获取到待编辑的文件而无需指定该文件的存储路径了。
使用方法:
$ rosed [package_name] [filename]
创建ROS消息和ROS服务
消息(msg)和服务(srv)介绍
消息(msg): msg文件就是一个描述ROS中所使用消息类型的简单文本。它们会被用来生成不同语言的源代码。服务(srv): 一个srv文件描述一项服务。它包含两个部分:请求和响应。
msg文件存放在package的msg目录下,srv文件则存放在srv目录下。
msg文件实际上就是每行声明一个数据类型和变量名。可以使用的数据类型如下:
int8, int16, int32, int64 (plus uint*)
float32, float64
string
time, duration
other msg files
variable-length array[] and fixed-length array[C]
在ROS中有一个特殊的数据类型:Header,它含有时间戳和坐标系信息。在msg文件的第一行经常可以看到Header header的声明.
下面是一个msg文件的样例,它使用了Header,string,和其他另外两个消息类型。
Header header
string child_frame_id
geometry_msgs/PoseWithCovariance pose
geometry_msgs/TwistWithCovariance twist
srv文件分为请求和响应两部分,由’—'分隔。下面是srv的一个样例:
int64 A
int64 B
int64 Sum
其中 A 和 B 是请求, 而Sum 是响应。
创建一个 msg
1、定义msg
例:
$ cd ~/catkin_ws/src/beginner_tutorials
$ mkdir msg
$ echo "int64 num" > msg/Num.msg`
2、查看package.xml, 确保它包含一下两条语句:(确保msg文件被转换成为C++,Python和其他语言的源代码)
<build_depend>message_generation</build_depend><exec_depend>message_runtime</exec_depend>
如果没有,添加进去。 注意,在构建的时候,我们只需要"message_generation"。然而,在运行的时候,我们只需要"message_runtime"。
3、在 CMakeLists.txt文件中,
3-1 利用find_packag函数,增加对message_generation的依赖,这样就可以生成消息了。
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs message_generation)
3-2 设置运行依赖:
catkin_package(...CATKIN_DEPENDS message_runtime ......)
3-3 找到如下代码块:
#add_message_files(
#FILES
#Message1.msg
#Message2.msg
#)
去掉注释符号#,用你的.msg文件替代Message*.msg,就像下边这样:
add_message_files(FILESNum.msg
)
3-4 确保CMake知道在什么时候重新配置我们的project:
generate_messages()
现在,可以生成自己的消息源代码了。
使用 rosmsg
通过rosmsg show命令,检查ROS是否能够识消息。
使用方法:
$ rosmsg show [message type]
样例:
$ rosmsg show beginner_tutorials/Num
你将会看到:
int64 num
在上边的样例中,消息类型包含两部分:
beginner_tutorials -- 消息所在的packageNum -- 消息名Num.
如果你忘记了消息所在的package,你也可以省略掉package名。输入:
$ rosmsg show Num
你将会看到:
[beginner_tutorials/Num]:
int64 num
创建一个srv
1、定义srv
在刚刚那个package中创建一个服务:
$ roscd beginner_tutorials
$ mkdir srv
这次我们不再手动创建服务,而是从其他的package中复制一个服务。 roscp是一个很实用的命令行工具,它实现了将文件从一个package复制到另外一个package的功能。
使用方法:
$ roscp [package_name] [file_to_copy_path] [copy_path]
现在我们可以从rospy_tutorials package中复制一个服务文件了:
$ roscp rospy_tutorials AddTwoInts.srv srv/AddTwoInts.srv
2、确保srv文件被转换成C++,Python和其他语言的源代码。
在CMakeLists.txt文件中增加了对message_generation的依赖
find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgsmessage_generation)
(对的, message_generation 对msg和srv都起作用)
3、删掉#,去除对下边语句的注释:
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
用你自己的srv文件名替换掉那些Service*.srv文件:
add_service_files(FILESAddTwoInts.srv
)
现在,可以生成自己的服务源代码了。
使用 rossrv
通过rosmsg show命令,检查ROS是否能够识该服务。
使用方法:
$ rossrv show <service type>
例子:
$ rossrv show beginner_tutorials/AddTwoInts
你将会看到:
int64 a
int64 b
---
int64 sum
msg和srv都需要的步骤
1、在CMakeLists.txt中找到如下部分:
# generate_messages(
# DEPENDENCIES
# # std_msgs # Or other packages containing msgs
# )
去掉注释并附加上所有你消息文件所依赖的那些含有.msg文件的package(这个例子是依赖std_msgs,不要添加roscpp,rospy),结果如下:
generate_messages(DEPENDENCIESstd_msgs
)
2、重新编译我们的package:
# In your catkin workspace
$ cd ../..
$ catkin_make
$ cd -
所有在msg路径下的.msg文件都将转换为ROS所支持语言的源代码。
生成的C++头文件将会放置在~/catkin_ws/devel/include/beginner_tutorials/。
Python脚本语言会在~/catkin_ws/devel/lib/python2.7/dist-packages/beginner_tutorials/msg目录下创建。
lisp文件会出现在~/catkin_ws/devel/share/common-lisp/ros/beginner_tutorials/msg/ 路径下.
获得帮助
我们已经接触到不少的ROS工具了。有时候很难记住他们所需要的参数。还好大多数ROS工具都提供了帮助。
输入:
$ rosmsg -h
你可以看到一系列的rosmsg子命令.Commands:rosmsg show Show message descriptionrosmsg users Find files that use messagerosmsg md5 Display message md5sumrosmsg package List messages in a packagerosmsg packages List packages that contain messages
同样你也可以获得子命令的帮助:
$ rosmsg show -h
这会显示rosmsg show 所需的参数:Usage: rosmsg show [options] <message type>Options:-h, --help show this help message and exit-r, --raw show raw message text, including comments
如若内容造成侵权/违法违规/事实不符,请联系编程学习网邮箱:809451989@qq.com进行投诉反馈,一经查实,立即删除!
相关文章
- ROS入门笔记(四):ROS实践(小海龟仿真)— ROS Topics
ROS入门笔记(四):ROS实践(小海龟仿真)— ROS Topics 文章目录1 基础知识1.1 运行ROS Master所在主机的资源地址1.2 ROS常用命令1.2.1 查看所有以ros开头的命令1.2.2 命令的快捷方式1.3 重要命令2 ROS Topics2.1 使用rq…...
2024/4/15 18:03:42 - ros常用命令整理[持续更新]
会陆续添加 文章目录1 基本操作相关1.1 查看ROS_PACKAGE_PATH环境变量1.2 rosrun 命令1.3 rosls 命令1.4 roscd 命令1.5 roscd log命令1.6 rosed 命令1.7 rospack 命令2 Node相关2.1 rosnode 命令3 rostopic 命令3.1 rostopic list3.2 rostopic echo3.3 rostopic type & ro…...
2024/4/11 23:32:54 - 物体跟踪器object_tracker.py解读
物体跟踪器object_tracker.py 1.先安装rbx1这个包; 2.代码文档位置:rbx1_apps/nodes 3.代码解读:源码注释 import rospy from sensor_msgs.msg import RegionOfInterest, CameraInfo from geometry_msgs.msg import Twist import thread c…...
2024/4/12 14:41:51 - javascript 库_评估任何新JavaScript库时需要考虑的12件事
javascript 库by Sacha Greif由Sacha Greif 评估任何新JavaScript库时需要考虑的12件事 (The 12 Things You Need to Consider When Evaluating Any New JavaScript Library) 您如何知道一项新技术是否值得投入时间? (How do you know if a new technology is wort…...
2024/4/18 6:12:49 - ROS常用命令汇总
ROS系统也是通过命令行操作,总结了下平时工作中使用的命令工具,以后使用多会陆续添加. 查看ROS_PACKAGE_PATH环境变量 $ echo $ROS_PACKAGE_PATH /home/saneri/catkin_ws/src:/opt/ros/kinetic/share roscore 命令是你在运行所有ROS程序前首先要运行的命令。 $ ros…...
2024/4/9 12:43:57 - ROS快速入门使用
文章目录:1 ROS的安装2 ROS的文件系统命令rosls、roscd、rospack find的快速使用2.1 rosls:快速列举ros文件目录下的文件2.2 roscd:快速切换到ros文件系统的指定目录2.3 rospack find <文件名/目录名>查找指定文件或目录的路径3 创建RO…...
2024/4/19 22:19:22 - 单眼皮整割双眼皮后怕
...
2024/4/11 23:33:18 - 空总割威海埋眼线双眼皮多少钱
...
2024/4/13 5:43:08 - 埋眼线和割双眼皮比较
...
2024/4/19 12:30:53 - 贺小虎做拉双眼皮寻诊?星
...
2024/4/20 11:10:54 - 一般双眼皮什么情况会失败
...
2024/4/19 22:09:14 - 常用技术网站
一些常用网站吧,不定期添加 技术网站 http://www.eoeandroid.com 优亿开发 http://www.iteye.com http://www.cnblogs.com 博客园 http://www.csdn.net CSDN http://my.csdn.net/my/favorite http://www.apkbus.com 安卓巴士 http://android.blog.51cto.com…...
2024/4/20 14:40:09 - 2018 ngChina —— “跨平台”版块简介
跨平台开发已经是很多应用的首选项,这次的大会带来了三个跨平台相关的主题: 趋势:Web 即原生 | Web Is The New Native 2018 年,我们把赌注完全压在了 Web 技术上!每隔一个月就会有一个新的 Web API,而浏览…...
2024/4/20 14:40:07 - 南医大二附院 割双眼皮怎样
...
2024/4/20 14:40:05 - 沈干博士割完双眼皮后眼角单了
...
2024/4/11 23:33:18 - 做双眼皮哪家医院最好
...
2024/4/13 5:21:26 - 西安开眼角和双眼皮权威艺星
...
2024/4/11 23:33:18 - 长春做韩式双眼皮疼吗
...
2024/4/19 20:52:26 - CryptoJS 加密的使用方法
因为公司的项目中用到了接口加密解密,所以百度了一下前端JS加密相关的文章,发现谷歌的CryptoJS挺好用的,因为项目用的是vue框架,记录一下项目中使用经验: 首先使用npm安装CryptoJS npm install crypto-js 引用 imp…...
2024/4/11 23:33:12 - 多层嵌套json解析与构建|vuejs初探
出于一些原因,码哥最近接触到了vuejs,不可否认,这个前端框架近来确实特别热。抱着求知的心态,点开了vuejs的官方教程。 理解Vuejs 首先看到的是这么一个定义:Vue.js(读音 /vjuː/, 类似于 view࿰…...
2024/4/12 12:20:41
最新文章
- 如何查看微信公众号发布文章的主图,如何看微信文章的主图,怎么才能拿到主图
如何查看,微信公众号发布文章的主图,如何看微信文章的主图 起因是这样的,当我看到一篇文章的时候,他的主图很漂亮,但是,正文里没有,而我又想看到,并且使用这张图片,该怎么…...
2024/4/20 21:26:52 - 梯度消失和梯度爆炸的一些处理方法
在这里是记录一下梯度消失或梯度爆炸的一些处理技巧。全当学习总结了如有错误还请留言,在此感激不尽。 权重和梯度的更新公式如下: w w − η ⋅ ∇ w w w - \eta \cdot \nabla w ww−η⋅∇w 个人通俗的理解梯度消失就是网络模型在反向求导的时候出…...
2024/3/20 10:50:27 - java的gradle,maven工程中使用selenium
一、下载selenium库 (1)gradle工程 工程中会有一个build.gradle.kts的文件,这个文件可以定制 Gradle 的行为 在文件中添加下面代码,然后sync // implementation ("org.seleniumhq.selenium:selenium-java:4.19.1") …...
2024/4/19 3:29:46 - 巨控科技新品发布:全方位升级,引领智能控制新纪元
标签: #巨控科技 #智能控制 #新品发布 #GRM560 #OPC560 #NET400 在智能控制领域,巨控科技始终以其前沿技术和创新产品引领着市场的潮流。近日,巨控科技再次以其行业领先的研发实力,推出了三大系列的新产品,旨在为各行各业提供更…...
2024/4/16 10:23:07 - 【外汇早评】美通胀数据走低,美元调整
原标题:【外汇早评】美通胀数据走低,美元调整昨日美国方面公布了新一期的核心PCE物价指数数据,同比增长1.6%,低于前值和预期值的1.7%,距离美联储的通胀目标2%继续走低,通胀压力较低,且此前美国一季度GDP初值中的消费部分下滑明显,因此市场对美联储后续更可能降息的政策…...
2024/4/19 14:24:02 - 【原油贵金属周评】原油多头拥挤,价格调整
原标题:【原油贵金属周评】原油多头拥挤,价格调整本周国际劳动节,我们喜迎四天假期,但是整个金融市场确实流动性充沛,大事频发,各个商品波动剧烈。美国方面,在本周四凌晨公布5月份的利率决议和新闻发布会,维持联邦基金利率在2.25%-2.50%不变,符合市场预期。同时美联储…...
2024/4/19 18:20:22 - 【外汇周评】靓丽非农不及疲软通胀影响
原标题:【外汇周评】靓丽非农不及疲软通胀影响在刚结束的周五,美国方面公布了新一期的非农就业数据,大幅好于前值和预期,新增就业重新回到20万以上。具体数据: 美国4月非农就业人口变动 26.3万人,预期 19万人,前值 19.6万人。 美国4月失业率 3.6%,预期 3.8%,前值 3…...
2024/4/19 11:57:31 - 【原油贵金属早评】库存继续增加,油价收跌
原标题:【原油贵金属早评】库存继续增加,油价收跌周三清晨公布美国当周API原油库存数据,上周原油库存增加281万桶至4.692亿桶,增幅超过预期的74.4万桶。且有消息人士称,沙特阿美据悉将于6月向亚洲炼油厂额外出售更多原油,印度炼油商预计将每日获得至多20万桶的额外原油供…...
2024/4/19 11:57:31 - 【外汇早评】日本央行会议纪要不改日元强势
原标题:【外汇早评】日本央行会议纪要不改日元强势近两日日元大幅走强与近期市场风险情绪上升,避险资金回流日元有关,也与前一段时间的美日贸易谈判给日本缓冲期,日本方面对汇率问题也避免继续贬值有关。虽然今日早间日本央行公布的利率会议纪要仍然是支持宽松政策,但这符…...
2024/4/19 11:57:52 - 【原油贵金属早评】欧佩克稳定市场,填补伊朗问题的影响
原标题:【原油贵金属早评】欧佩克稳定市场,填补伊朗问题的影响近日伊朗局势升温,导致市场担忧影响原油供给,油价试图反弹。此时OPEC表态稳定市场。据消息人士透露,沙特6月石油出口料将低于700万桶/日,沙特已经收到石油消费国提出的6月份扩大出口的“适度要求”,沙特将满…...
2024/4/19 11:57:53 - 【外汇早评】美欲与伊朗重谈协议
原标题:【外汇早评】美欲与伊朗重谈协议美国对伊朗的制裁遭到伊朗的抗议,昨日伊朗方面提出将部分退出伊核协议。而此行为又遭到欧洲方面对伊朗的谴责和警告,伊朗外长昨日回应称,欧洲国家履行它们的义务,伊核协议就能保证存续。据传闻伊朗的导弹已经对准了以色列和美国的航…...
2024/4/19 11:58:14 - 【原油贵金属早评】波动率飙升,市场情绪动荡
原标题:【原油贵金属早评】波动率飙升,市场情绪动荡因中美贸易谈判不安情绪影响,金融市场各资产品种出现明显的波动。随着美国与中方开启第十一轮谈判之际,美国按照既定计划向中国2000亿商品征收25%的关税,市场情绪有所平复,已经开始接受这一事实。虽然波动率-恐慌指数VI…...
2024/4/19 11:58:20 - 【原油贵金属周评】伊朗局势升温,黄金多头跃跃欲试
原标题:【原油贵金属周评】伊朗局势升温,黄金多头跃跃欲试美国和伊朗的局势继续升温,市场风险情绪上升,避险黄金有向上突破阻力的迹象。原油方面稍显平稳,近期美国和OPEC加大供给及市场需求回落的影响,伊朗局势并未推升油价走强。近期中美贸易谈判摩擦再度升级,美国对中…...
2024/4/20 7:40:48 - 【原油贵金属早评】市场情绪继续恶化,黄金上破
原标题:【原油贵金属早评】市场情绪继续恶化,黄金上破周初中国针对于美国加征关税的进行的反制措施引发市场情绪的大幅波动,人民币汇率出现大幅的贬值动能,金融市场受到非常明显的冲击。尤其是波动率起来之后,对于股市的表现尤其不安。隔夜美国股市出现明显的下行走势,这…...
2024/4/19 11:58:39 - 【外汇早评】美伊僵持,风险情绪继续升温
原标题:【外汇早评】美伊僵持,风险情绪继续升温昨日沙特两艘油轮再次发生爆炸事件,导致波斯湾局势进一步恶化,市场担忧美伊可能会出现摩擦生火,避险品种获得支撑,黄金和日元大幅走强。美指受中美贸易问题影响而在低位震荡。继5月12日,四艘商船在阿联酋领海附近的阿曼湾、…...
2024/4/19 11:58:51 - 【原油贵金属早评】贸易冲突导致需求低迷,油价弱势
原标题:【原油贵金属早评】贸易冲突导致需求低迷,油价弱势近日虽然伊朗局势升温,中东地区几起油船被袭击事件影响,但油价并未走高,而是出于调整结构中。由于市场预期局势失控的可能性较低,而中美贸易问题导致的全球经济衰退风险更大,需求会持续低迷,因此油价调整压力较…...
2024/4/20 3:12:02 - 氧生福地 玩美北湖(上)——为时光守候两千年
原标题:氧生福地 玩美北湖(上)——为时光守候两千年一次说走就走的旅行,只有一张高铁票的距离~ 所以,湖南郴州,我来了~ 从广州南站出发,一个半小时就到达郴州西站了。在动车上,同时改票的南风兄和我居然被分到了一个车厢,所以一路非常愉快地聊了过来。 挺好,最起…...
2024/4/19 11:59:15 - 氧生福地 玩美北湖(中)——永春梯田里的美与鲜
原标题:氧生福地 玩美北湖(中)——永春梯田里的美与鲜一觉醒来,因为大家太爱“美”照,在柳毅山庄去寻找龙女而错过了早餐时间。近十点,向导坏坏还是带着饥肠辘辘的我们去吃郴州最富有盛名的“鱼头粉”。说这是“十二分推荐”,到郴州必吃的美食之一。 哇塞!那个味美香甜…...
2024/4/19 11:59:23 - 氧生福地 玩美北湖(下)——奔跑吧骚年!
原标题:氧生福地 玩美北湖(下)——奔跑吧骚年!让我们红尘做伴 活得潇潇洒洒 策马奔腾共享人世繁华 对酒当歌唱出心中喜悦 轰轰烈烈把握青春年华 让我们红尘做伴 活得潇潇洒洒 策马奔腾共享人世繁华 对酒当歌唱出心中喜悦 轰轰烈烈把握青春年华 啊……啊……啊 两…...
2024/4/19 11:59:44 - 扒开伪装医用面膜,翻六倍价格宰客,小姐姐注意了!
原标题:扒开伪装医用面膜,翻六倍价格宰客,小姐姐注意了!扒开伪装医用面膜,翻六倍价格宰客!当行业里的某一品项火爆了,就会有很多商家蹭热度,装逼忽悠,最近火爆朋友圈的医用面膜,被沾上了污点,到底怎么回事呢? “比普通面膜安全、效果好!痘痘、痘印、敏感肌都能用…...
2024/4/19 11:59:48 - 「发现」铁皮石斛仙草之神奇功效用于医用面膜
原标题:「发现」铁皮石斛仙草之神奇功效用于医用面膜丽彦妆铁皮石斛医用面膜|石斛多糖无菌修护补水贴19大优势: 1、铁皮石斛:自唐宋以来,一直被列为皇室贡品,铁皮石斛生于海拔1600米的悬崖峭壁之上,繁殖力差,产量极低,所以古代仅供皇室、贵族享用 2、铁皮石斛自古民间…...
2024/4/19 12:00:06 - 丽彦妆\医用面膜\冷敷贴轻奢医学护肤引导者
原标题:丽彦妆\医用面膜\冷敷贴轻奢医学护肤引导者【公司简介】 广州华彬企业隶属香港华彬集团有限公司,专注美业21年,其旗下品牌: 「圣茵美」私密荷尔蒙抗衰,产后修复 「圣仪轩」私密荷尔蒙抗衰,产后修复 「花茵莳」私密荷尔蒙抗衰,产后修复 「丽彦妆」专注医学护…...
2024/4/20 21:12:02 - 广州械字号面膜生产厂家OEM/ODM4项须知!
原标题:广州械字号面膜生产厂家OEM/ODM4项须知!广州械字号面膜生产厂家OEM/ODM流程及注意事项解读: 械字号医用面膜,其实在我国并没有严格的定义,通常我们说的医美面膜指的应该是一种「医用敷料」,也就是说,医用面膜其实算作「医疗器械」的一种,又称「医用冷敷贴」。 …...
2024/4/19 12:00:25 - 械字号医用眼膜缓解用眼过度到底有无作用?
原标题:械字号医用眼膜缓解用眼过度到底有无作用?医用眼膜/械字号眼膜/医用冷敷眼贴 凝胶层为亲水高分子材料,含70%以上的水分。体表皮肤温度传导到本产品的凝胶层,热量被凝胶内水分子吸收,通过水分的蒸发带走大量的热量,可迅速地降低体表皮肤局部温度,减轻局部皮肤的灼…...
2024/4/19 12:00:40 - 配置失败还原请勿关闭计算机,电脑开机屏幕上面显示,配置失败还原更改 请勿关闭计算机 开不了机 这个问题怎么办...
解析如下:1、长按电脑电源键直至关机,然后再按一次电源健重启电脑,按F8健进入安全模式2、安全模式下进入Windows系统桌面后,按住“winR”打开运行窗口,输入“services.msc”打开服务设置3、在服务界面,选中…...
2022/11/19 21:17:18 - 错误使用 reshape要执行 RESHAPE,请勿更改元素数目。
%读入6幅图像(每一幅图像的大小是564*564) f1 imread(WashingtonDC_Band1_564.tif); subplot(3,2,1),imshow(f1); f2 imread(WashingtonDC_Band2_564.tif); subplot(3,2,2),imshow(f2); f3 imread(WashingtonDC_Band3_564.tif); subplot(3,2,3),imsho…...
2022/11/19 21:17:16 - 配置 已完成 请勿关闭计算机,win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机...
win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机”问题的解决方法在win7系统关机时如果有升级系统的或者其他需要会直接进入一个 等待界面,在等待界面中我们需要等待操作结束才能关机,虽然这比较麻烦,但是对系统进行配置和升级…...
2022/11/19 21:17:15 - 台式电脑显示配置100%请勿关闭计算机,“准备配置windows 请勿关闭计算机”的解决方法...
有不少用户在重装Win7系统或更新系统后会遇到“准备配置windows,请勿关闭计算机”的提示,要过很久才能进入系统,有的用户甚至几个小时也无法进入,下面就教大家这个问题的解决方法。第一种方法:我们首先在左下角的“开始…...
2022/11/19 21:17:14 - win7 正在配置 请勿关闭计算机,怎么办Win7开机显示正在配置Windows Update请勿关机...
置信有很多用户都跟小编一样遇到过这样的问题,电脑时发现开机屏幕显现“正在配置Windows Update,请勿关机”(如下图所示),而且还需求等大约5分钟才干进入系统。这是怎样回事呢?一切都是正常操作的,为什么开时机呈现“正…...
2022/11/19 21:17:13 - 准备配置windows 请勿关闭计算机 蓝屏,Win7开机总是出现提示“配置Windows请勿关机”...
Win7系统开机启动时总是出现“配置Windows请勿关机”的提示,没过几秒后电脑自动重启,每次开机都这样无法进入系统,此时碰到这种现象的用户就可以使用以下5种方法解决问题。方法一:开机按下F8,在出现的Windows高级启动选…...
2022/11/19 21:17:12 - 准备windows请勿关闭计算机要多久,windows10系统提示正在准备windows请勿关闭计算机怎么办...
有不少windows10系统用户反映说碰到这样一个情况,就是电脑提示正在准备windows请勿关闭计算机,碰到这样的问题该怎么解决呢,现在小编就给大家分享一下windows10系统提示正在准备windows请勿关闭计算机的具体第一种方法:1、2、依次…...
2022/11/19 21:17:11 - 配置 已完成 请勿关闭计算机,win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机”的解决方法...
今天和大家分享一下win7系统重装了Win7旗舰版系统后,每次关机的时候桌面上都会显示一个“配置Windows Update的界面,提示请勿关闭计算机”,每次停留好几分钟才能正常关机,导致什么情况引起的呢?出现配置Windows Update…...
2022/11/19 21:17:10 - 电脑桌面一直是清理请关闭计算机,windows7一直卡在清理 请勿关闭计算机-win7清理请勿关机,win7配置更新35%不动...
只能是等着,别无他法。说是卡着如果你看硬盘灯应该在读写。如果从 Win 10 无法正常回滚,只能是考虑备份数据后重装系统了。解决来方案一:管理员运行cmd:net stop WuAuServcd %windir%ren SoftwareDistribution SDoldnet start WuA…...
2022/11/19 21:17:09 - 计算机配置更新不起,电脑提示“配置Windows Update请勿关闭计算机”怎么办?
原标题:电脑提示“配置Windows Update请勿关闭计算机”怎么办?win7系统中在开机与关闭的时候总是显示“配置windows update请勿关闭计算机”相信有不少朋友都曾遇到过一次两次还能忍但经常遇到就叫人感到心烦了遇到这种问题怎么办呢?一般的方…...
2022/11/19 21:17:08 - 计算机正在配置无法关机,关机提示 windows7 正在配置windows 请勿关闭计算机 ,然后等了一晚上也没有关掉。现在电脑无法正常关机...
关机提示 windows7 正在配置windows 请勿关闭计算机 ,然后等了一晚上也没有关掉。现在电脑无法正常关机以下文字资料是由(历史新知网www.lishixinzhi.com)小编为大家搜集整理后发布的内容,让我们赶快一起来看一下吧!关机提示 windows7 正在配…...
2022/11/19 21:17:05 - 钉钉提示请勿通过开发者调试模式_钉钉请勿通过开发者调试模式是真的吗好不好用...
钉钉请勿通过开发者调试模式是真的吗好不好用 更新时间:2020-04-20 22:24:19 浏览次数:729次 区域: 南阳 > 卧龙 列举网提醒您:为保障您的权益,请不要提前支付任何费用! 虚拟位置外设器!!轨迹模拟&虚拟位置外设神器 专业用于:钉钉,外勤365,红圈通,企业微信和…...
2022/11/19 21:17:05 - 配置失败还原请勿关闭计算机怎么办,win7系统出现“配置windows update失败 还原更改 请勿关闭计算机”,长时间没反应,无法进入系统的解决方案...
前几天班里有位学生电脑(windows 7系统)出问题了,具体表现是开机时一直停留在“配置windows update失败 还原更改 请勿关闭计算机”这个界面,长时间没反应,无法进入系统。这个问题原来帮其他同学也解决过,网上搜了不少资料&#x…...
2022/11/19 21:17:04 - 一个电脑无法关闭计算机你应该怎么办,电脑显示“清理请勿关闭计算机”怎么办?...
本文为你提供了3个有效解决电脑显示“清理请勿关闭计算机”问题的方法,并在最后教给你1种保护系统安全的好方法,一起来看看!电脑出现“清理请勿关闭计算机”在Windows 7(SP1)和Windows Server 2008 R2 SP1中,添加了1个新功能在“磁…...
2022/11/19 21:17:03 - 请勿关闭计算机还原更改要多久,电脑显示:配置windows更新失败,正在还原更改,请勿关闭计算机怎么办...
许多用户在长期不使用电脑的时候,开启电脑发现电脑显示:配置windows更新失败,正在还原更改,请勿关闭计算机。。.这要怎么办呢?下面小编就带着大家一起看看吧!如果能够正常进入系统,建议您暂时移…...
2022/11/19 21:17:02 - 还原更改请勿关闭计算机 要多久,配置windows update失败 还原更改 请勿关闭计算机,电脑开机后一直显示以...
配置windows update失败 还原更改 请勿关闭计算机,电脑开机后一直显示以以下文字资料是由(历史新知网www.lishixinzhi.com)小编为大家搜集整理后发布的内容,让我们赶快一起来看一下吧!配置windows update失败 还原更改 请勿关闭计算机&#x…...
2022/11/19 21:17:01 - 电脑配置中请勿关闭计算机怎么办,准备配置windows请勿关闭计算机一直显示怎么办【图解】...
不知道大家有没有遇到过这样的一个问题,就是我们的win7系统在关机的时候,总是喜欢显示“准备配置windows,请勿关机”这样的一个页面,没有什么大碍,但是如果一直等着的话就要两个小时甚至更久都关不了机,非常…...
2022/11/19 21:17:00 - 正在准备配置请勿关闭计算机,正在准备配置windows请勿关闭计算机时间长了解决教程...
当电脑出现正在准备配置windows请勿关闭计算机时,一般是您正对windows进行升级,但是这个要是长时间没有反应,我们不能再傻等下去了。可能是电脑出了别的问题了,来看看教程的说法。正在准备配置windows请勿关闭计算机时间长了方法一…...
2022/11/19 21:16:59 - 配置失败还原请勿关闭计算机,配置Windows Update失败,还原更改请勿关闭计算机...
我们使用电脑的过程中有时会遇到这种情况,当我们打开电脑之后,发现一直停留在一个界面:“配置Windows Update失败,还原更改请勿关闭计算机”,等了许久还是无法进入系统。如果我们遇到此类问题应该如何解决呢࿰…...
2022/11/19 21:16:58 - 如何在iPhone上关闭“请勿打扰”
Apple’s “Do Not Disturb While Driving” is a potentially lifesaving iPhone feature, but it doesn’t always turn on automatically at the appropriate time. For example, you might be a passenger in a moving car, but your iPhone may think you’re the one dri…...
2022/11/19 21:16:57