Ardupilot飞控姿态角与姿态角速度控制过程
目录
-
- 目录
- 摘要
- 1.自稳模式初始化
- 2.自稳模式更新函数
- 这个代码主要把横滚输入,俯仰输入量转换成目标角度需要的范围,也就是+4500,-4500
- 3.姿态角速度代码控制过程分析
- 4.电机PWM控制运算
摘要
本节主要记录自己学习ardupilot飞控代码的姿态角速度的控制过程
分析过程:主要从ardupilot自稳模式开始,然后到角速度控制,最后到输出PWM控制电机实现无人机的基本运动模式的过程。思考:无人机工作在自稳模式,需要输入的是什么,自稳模式工作后输出了什么,输出的值怎么传到姿态角速度控制,姿态角速度控制最后输出了的PID怎么控制无人机的?
1.自稳模式初始化
从bool Copter::set_mode(control_mode_t mode, mode_reason_t reason)函数开始
寻找自稳模式初始化:
success = stabilize_init(ignore_checks); //姿态自我稳定模式
bool Copter::stabilize_init(bool ignore_checks)
{// if landed and the mode we're switching from does not have manual throttle and the throttle stick is too high//如果着陆,我们切换的模式不能是手动控制模式并且油门值不能太高,否则返回。if (motors->armed() && ap.land_complete && !mode_has_manual_throttle(control_mode) &&(get_pilot_desired_throttle(channel_throttle->get_control_in()) > get_non_takeoff_throttle())){return false;}//将目标高度设置为零以用于报告--------set target altitude to zero for reportingpos_control->set_alt_target(0);return true;
}
看下其中一个函数:void set_alt_target(float alt_cm) //设置目标高度{ _pos_target.z = alt_cm; }这个函数就是设置目标高度的函数,我们是自稳模式,定高不需要设置,自稳模式设置不是特别复杂。下面看下自稳模式运行函数2.自稳模式更新函数
(1)从update_flight_mode()函数开始;
(2) stabilize_run(); //自稳控制
自稳模式作用完一定会把运算的PID数据作为姿态角速度环的目标输入量,我们看下这个函数的实现过程:
void Copter::stabilize_run()
{float target_roll, target_pitch;float target_yaw_rate;float pilot_throttle_scaled;//如果没有解锁,油门死区没有设置,获取电机安全锁没有开,立即返回---------if not armed set throttle to zero and exit immediatelyif (!motors->armed() || ap.throttle_zero || !motors->get_interlock()) //要想解锁,这些条件全部是假的,才可以;_flags.interlock=0,不转{motors->set_desired_spool_state(AP_Motors::DESIRED_SPIN_WHEN_ARMED);attitude_control->set_throttle_out_unstabilized(0,true,g.throttle_filt);return;}//清空着落标志------------------------clear landing flagset_land_complete(false); //ap.land_complete=0没有着落motors->set_desired_spool_state(AP_Motors::DESIRED_THROTTLE_UNLIMITED); //设置油门限制不使能//申请简单的模式到飞行器-----------------------------------------apply SIMPLE mode transform to pilot inputsupdate_simple_mode();//将遥控器输入转换成倾斜角度----------------------------------------convert pilot input to lean angles//要做的:转换成无人机的倾斜角度作为期望的角度(单位是浮点数据)-----------To-Do: convert get_pilot_desired_lean_angles to return angles as floatsget_pilot_desired_lean_angles(channel_roll->get_control_in(), channel_pitch->get_control_in(), target_roll, target_pitch, aparm.angle_max);//获取目标偏航角速度-----------------------------------------------get pilot's desired yaw ratetarget_yaw_rate = get_pilot_desired_yaw_rate(channel_yaw->get_control_in());//获取飞行目标所需要的油门值-----------------------------------------get pilot's desired throttlepilot_throttle_scaled = get_pilot_desired_throttle(channel_throttle->get_control_in());//调用姿态控制器---------------------------------------------------call attitude controllerattitude_control->input_euler_angle_roll_pitch_euler_rate_yaw(target_roll, target_pitch, target_yaw_rate, get_smoothing_gain());//机体坐标角速率控制器运行周期100hz-----------------------------------body-frame rate controller is run directly from 100hz loop//输出飞行油门值--------------------------------------------------output pilot's throttleattitude_control->set_throttle_out(pilot_throttle_scaled, true, g.throttle_filt);
}对这个代码重点分析:
1》基本需要检查
if (!motors->armed() || ap.throttle_zero || !motors->get_interlock()) //要想解锁,这些条件全部是假的,才可以;_flags.interlock=0,不转{motors->set_desired_spool_state(AP_Motors::DESIRED_SPIN_WHEN_ARMED); //电机不解锁attitude_control->set_throttle_out_unstabilized(0,true,g.throttle_filt); //油门输出0return;}2》清空着陆标志
set_land_complete(false); //ap.land_complete=0没有着落3》油门限制不使能
motors->set_desired_spool_state(AP_Motors::DESIRED_THROTTLE_UNLIMITED); //设置油门限制不使能4》更新遥控器控制机头飞行模式
update_simple_mode();
void Copter::update_simple_mode(void)
{float rollx, pitchx;//如果没有新遥控器数据,再简单模式下立即退出------exit immediately if no new radio frame or not in simple modeif (ap.simple_mode == 0 || !ap.new_radio_frame) //没有配置简单模式就是直接正常模式{return;}//标记无线帧消耗---------- mark radio frame as consumedap.new_radio_frame = false;//总结:简单模式就是飞行器起飞时头部对准的方向始终为机体坐标系的pitch轴,//也就是说启动的时候就定死了机体坐标系,所以遥控器需要传入的 roll 和 pitch//值需要转到机体坐标系,在转到地球坐标中。if (ap.simple_mode == 1)//简单模式,头部对准的方向始终为机体方向{//旋转滚转,俯仰输入-初始简单航向(即面向北)---------rotate roll, pitch input by -initial simple heading (i.e. north facing)rollx = channel_roll->get_control_in()*simple_cos_yaw - channel_pitch->get_control_in()*simple_sin_yaw; //机体坐标pitchx = channel_roll->get_control_in()*simple_sin_yaw + channel_pitch->get_control_in()*simple_cos_yaw;}else //无头模式{//旋转滚转,俯仰输入-超简单航向(倒向回家)---------rotate roll, pitch input by -super simple heading (reverse of heading to home)rollx = channel_roll->get_control_in()*super_simple_cos_yaw - channel_pitch->get_control_in()*super_simple_sin_yaw;pitchx = channel_roll->get_control_in()*super_simple_sin_yaw + channel_pitch->get_control_in()*super_simple_cos_yaw;}// rotate roll, pitch input from north facing to vehicle's perspectivechannel_roll->set_control_in(rollx*ahrs.cos_yaw() + pitchx*ahrs.sin_yaw()); //旋转到地理坐标channel_pitch->set_control_in(-rollx*ahrs.sin_yaw() + pitchx*ahrs.cos_yaw()); //旋转到地理坐标
}5》从遥控器获取目标自稳控制量(target_roll,target_pitch,target_yaw_rate,pilot_throttle_scaled)
//获取目标横滚,俯仰,偏航自稳控制输入量
get_pilot_desired_lean_angles(channel_roll->get_control_in(), channel_pitch->get_control_in(), target_roll, target_pitch, aparm.angle_max);target_yaw_rate = get_pilot_desired_yaw_rate(channel_yaw->get_control_in());其中:channel_roll->get_control_in()
channel_pitch->get_control_in()
channel_yaw->get_control_in()
表示遥控器的输入量
RC_Channel *channel_roll;
RC_Channel *channel_pitch;
RC_Channel *channel_throttle;
RC_Channel *channel_yaw;
void Copter::get_pilot_desired_lean_angles(float roll_in, float pitch_in, float &roll_out, float &pitch_out, float angle_max)
{//安全检查角最大参数------------ sanity check angle max parameteraparm.angle_max = constrain_int16(aparm.angle_max,1000,8000);//限制最大倾斜角度-------------limit max lean angleangle_max = constrain_float(angle_max, 1000, aparm.angle_max);//求出系数--------------------scale roll_in, pitch_in to ANGLE_MAX parameter rangefloat scaler = aparm.angle_max/(float)ROLL_PITCH_YAW_INPUT_MAX; ///4500roll_in *= scaler;pitch_in *= scaler;//循环极限--------------------do circular limitfloat total_in = norm(pitch_in, roll_in); //横滚和俯仰合成限制if (total_in > angle_max){float ratio = angle_max / total_in;roll_in *= ratio;pitch_in *= ratio;}// do lateral tilt to euler roll conversionroll_in = (18000/M_PI) * atanf(cosf(pitch_in*(M_PI/18000))*tanf(roll_in*(M_PI/18000)));// returnroll_out = roll_in;pitch_out = pitch_in;
}这个代码主要把横滚输入,俯仰输入量转换成目标角度需要的范围,也就是+4500,-4500
float Copter::get_pilot_desired_yaw_rate(int16_t stick_angle)
{float yaw_request;// calculate yaw rate requestif (g2.acro_y_expo <= 0){yaw_request = stick_angle * g.acro_yaw_p; //g.acro_yaw_p=4.5} else{// expo variablesfloat y_in, y_in3, y_out;// range check expoif (g2.acro_y_expo > 1.0f || g2.acro_y_expo < 0.5f){g2.acro_y_expo = 1.0f;}// yaw expoy_in = float(stick_angle)/ROLL_PITCH_YAW_INPUT_MAX;y_in3 = y_in*y_in*y_in;y_out = (g2.acro_y_expo * y_in3) + ((1.0f - g2.acro_y_expo) * y_in);yaw_request = ROLL_PITCH_YAW_INPUT_MAX * y_out * g.acro_yaw_p;}// convert pilot input to the desired yaw ratereturn yaw_request;
}
偏航的控制,之间进行比例控制,然后把输出作为内环的控制量,由于偏航通道可以控制无人机顺时针旋转和逆时针旋转,所以这里怎么区分出来的呢?肯定是摇杆中立点是分界线,处理后,往左打是负值,往右是正,区分两个方向。最后得到偏航角速度目标控制量,偏航打杆控制速率,跟横滚,俯仰有所不同。油门函数处理;
pilot_throttle_scaled = get_pilot_desired_throttle(channel_throttle->get_control_in());
float Copter::get_pilot_desired_throttle(int16_t throttle_control, float thr_mid)
{if (thr_mid <= 0.0f){thr_mid = motors->get_throttle_hover();}int16_t mid_stick = channel_throttle->get_control_mid();// protect against unlikely divide by zeroif (mid_stick <= 0){mid_stick = 500;}// ensure reasonable throttle valuesthrottle_control = constrain_int16(throttle_control,0,1000); //确保数据值在0-1000// calculate normalised throttle inputfloat throttle_in;if (throttle_control < mid_stick){// below the deadbandthrottle_in = ((float)throttle_control)*0.5f/(float)mid_stick;}else if(throttle_control > mid_stick){// above the deadbandthrottle_in = 0.5f + ((float)(throttle_control-mid_stick)) * 0.5f / (float)(1000-mid_stick);}else{// must be in the deadbandthrottle_in = 0.5f;}float expo = constrain_float(-(thr_mid-0.5)/0.375, -0.5f, 1.0f);// calculate the output throttle using the given expo functionfloat throttle_out = throttle_in*(1.0f-expo) + expo*throttle_in*throttle_in*throttle_in;return throttle_out; //0---1
}最后得到的油门值范围是【0-1】
6》最重要的姿态控制器
attitude_control->input_euler_angle_roll_pitch_euler_rate_yaw(target_roll, target_pitch, target_yaw_rate, get_smoothing_gain());
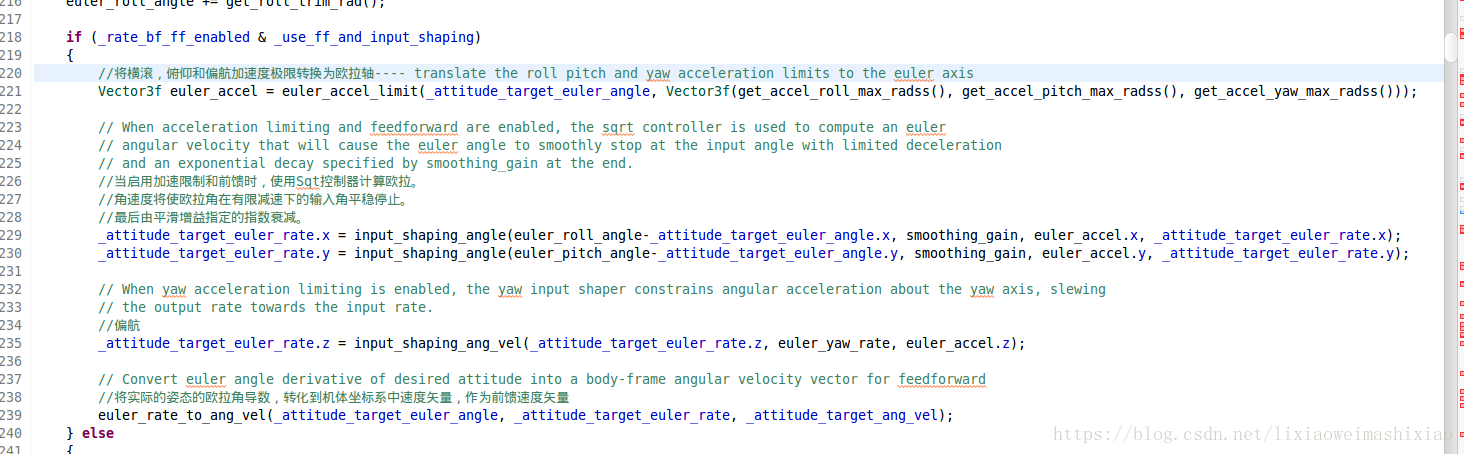
void AC_AttitudeControl::input_euler_angle_roll_pitch_euler_rate_yaw(float euler_roll_angle_cd, float euler_pitch_angle_cd, float euler_yaw_rate_cds, float smoothing_gain)
{//转换为弧度------Convert from centidegrees on public interface to radiansfloat euler_roll_angle = radians(euler_roll_angle_cd*0.01f); //缩小100倍float euler_pitch_angle = radians(euler_pitch_angle_cd*0.01f); //缩小100倍float euler_yaw_rate = radians(euler_yaw_rate_cds*0.01f); //缩小100倍//计算所需要的目标姿态欧拉角度--------calculate the attitude target euler angles_attitude_target_quat.to_euler(_attitude_target_euler_angle.x, _attitude_target_euler_angle.y, _attitude_target_euler_angle.z);//确保平滑增益不会引起过冲------------ensure smoothing gain can not cause overshootsmoothing_gain = constrain_float(smoothing_gain,1.0f,1/_dt);//增加辊纵倾以补偿Heli中的尾旋翼推力(将在多旋翼上返回零)----Add roll trim to compensate tail rotor thrust in heli (will return zero on multirotors)euler_roll_angle += get_roll_trim_rad();if (_rate_bf_ff_enabled & _use_ff_and_input_shaping){//将横滚,俯仰和偏航加速度极限转换为欧拉轴---- translate the roll pitch and yaw acceleration limits to the euler axisVector3f euler_accel = euler_accel_limit(_attitude_target_euler_angle, Vector3f(get_accel_roll_max_radss(), get_accel_pitch_max_radss(), get_accel_yaw_max_radss()));// When acceleration limiting and feedforward are enabled, the sqrt controller is used to compute an euler// angular velocity that will cause the euler angle to smoothly stop at the input angle with limited deceleration// and an exponential decay specified by smoothing_gain at the end.//当启用加速限制和前馈时,使用Sqt控制器计算欧拉。//角速度将使欧拉角在有限减速下的输入角平稳停止。//最后由平滑增益指定的指数衰减。_attitude_target_euler_rate.x = input_shaping_angle(euler_roll_angle-_attitude_target_euler_angle.x, smoothing_gain, euler_accel.x, _attitude_target_euler_rate.x);_attitude_target_euler_rate.y = input_shaping_angle(euler_pitch_angle-_attitude_target_euler_angle.y, smoothing_gain, euler_accel.y, _attitude_target_euler_rate.y);// When yaw acceleration limiting is enabled, the yaw input shaper constrains angular acceleration about the yaw axis, slewing// the output rate towards the input rate.//偏航_attitude_target_euler_rate.z = input_shaping_ang_vel(_attitude_target_euler_rate.z, euler_yaw_rate, euler_accel.z);// Convert euler angle derivative of desired attitude into a body-frame angular velocity vector for feedforward//将实际的姿态的欧拉角导数,转化到机体坐标系中速度矢量,作为前馈速度矢量euler_rate_to_ang_vel(_attitude_target_euler_angle, _attitude_target_euler_rate, _attitude_target_ang_vel);} else{// When feedforward is not enabled, the target euler angle is input into the target and the feedforward rate is zeroed._attitude_target_euler_angle.x = euler_roll_angle;_attitude_target_euler_angle.y = euler_pitch_angle;_attitude_target_euler_angle.z += euler_yaw_rate*_dt;// Compute quaternion target attitude_attitude_target_quat.from_euler(_attitude_target_euler_angle.x, _attitude_target_euler_angle.y, _attitude_target_euler_angle.z);// Set rate feedforward requests to zero_attitude_target_euler_rate = Vector3f(0.0f, 0.0f, 0.0f);_attitude_target_ang_vel = Vector3f(0.0f, 0.0f, 0.0f);}//呼叫四元数姿态控制器-------------Call quaternion attitude controllerattitude_controller_run_quat();
}对代码进行分析:
1》》转换得到需要的目标弧度值
float euler_roll_angle = radians(euler_roll_angle_cd*0.01f); //缩小100倍–[-45,45]
float euler_pitch_angle = radians(euler_pitch_angle_cd*0.01f); //缩小100倍
float euler_yaw_rate = radians(euler_yaw_rate_cds*0.01f); //缩小100倍
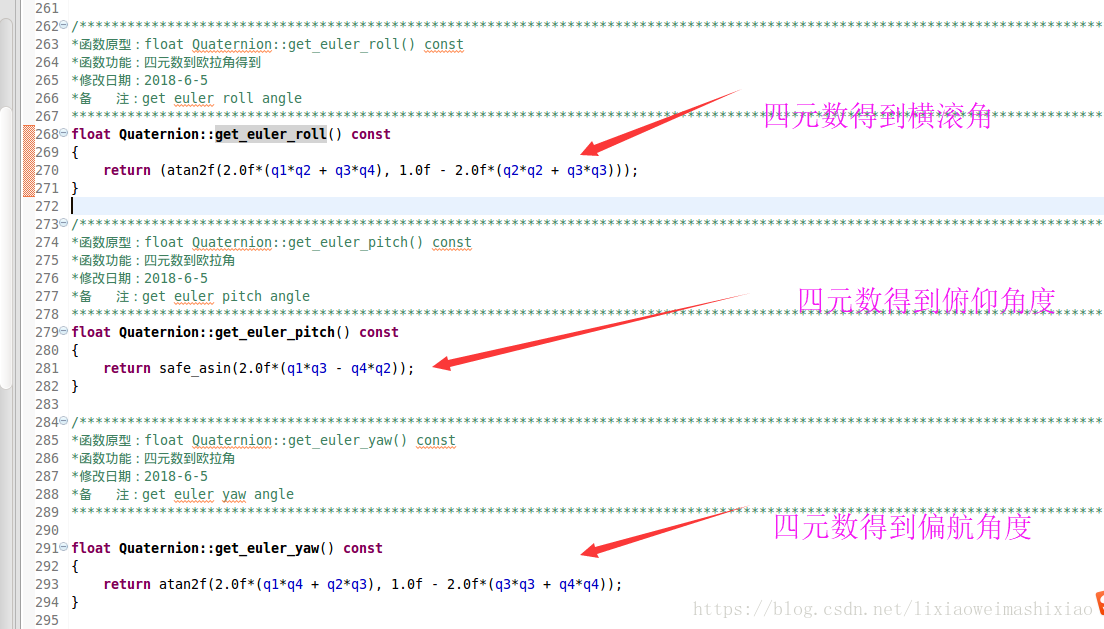
2》》获取当前无人机实际的姿态角
_attitude_target_quat.to_euler(_attitude_target_euler_angle.x, _attitude_target_euler_angle.y, _attitude_target_euler_angle.z);
到这里我们得到了无人机的实际姿态角度
_attitude_target_euler_angle.x—–实际横滚角度
_attitude_target_euler_angle.y—-实际的俯仰角度
_attitude_target_euler_angle.z—-实际的偏航角度
3》》油门值处理
smoothing_gain = constrain_float(smoothing_gain,1.0f,1/_dt);
4》》补偿处理: euler_roll_angle += get_roll_trim_rad();
5》》姿态PID运算
f (_rate_bf_ff_enabled & _use_ff_and_input_shaping){//将横滚,俯仰和偏航加速度极限转换为欧拉轴---- translate the roll pitch and yaw acceleration limits to the euler axisVector3f euler_accel = euler_accel_limit(_attitude_target_euler_angle, Vector3f(get_accel_roll_max_radss(), get_accel_pitch_max_radss(), get_accel_yaw_max_radss()));// When acceleration limiting and feedforward are enabled, the sqrt controller is used to compute an euler// angular velocity that will cause the euler angle to smoothly stop at the input angle with limited deceleration// and an exponential decay specified by smoothing_gain at the end.//当启用加速限制和前馈时,使用Sqt控制器计算欧拉。//角速度将使欧拉角在有限减速下的输入角平稳停止。//最后由平滑增益指定的指数衰减。_attitude_target_euler_rate.x = input_shaping_angle(euler_roll_angle-_attitude_target_euler_angle.x, smoothing_gain, euler_accel.x, _attitude_target_euler_rate.x);_attitude_target_euler_rate.y = input_shaping_angle(euler_pitch_angle-_attitude_target_euler_angle.y, smoothing_gain, euler_accel.y, _attitude_target_euler_rate.y);// When yaw acceleration limiting is enabled, the yaw input shaper constrains angular acceleration about the yaw axis, slewing// the output rate towards the input rate.//偏航_attitude_target_euler_rate.z = input_shaping_ang_vel(_attitude_target_euler_rate.z, euler_yaw_rate, euler_accel.z);// Convert euler angle derivative of desired attitude into a body-frame angular velocity vector for feedforward//将实际的姿态的欧拉角导数,转化到机体坐标系中速度矢量,作为前馈速度矢量euler_rate_to_ang_vel(_attitude_target_euler_angle, _attitude_target_euler_rate, _attitude_target_ang_vel);} else{// When feedforward is not enabled, the target euler angle is input into the target and the feedforward rate is zeroed._attitude_target_euler_angle.x = euler_roll_angle;_attitude_target_euler_angle.y = euler_pitch_angle;_attitude_target_euler_angle.z += euler_yaw_rate*_dt;// Compute quaternion target attitude_attitude_target_quat.from_euler(_attitude_target_euler_angle.x, _attitude_target_euler_angle.y, _attitude_target_euler_angle.z);// Set rate feedforward requests to zero_attitude_target_euler_rate = Vector3f(0.0f, 0.0f, 0.0f);_attitude_target_ang_vel = Vector3f(0.0f, 0.0f, 0.0f);}
这里我们先讲解不使用平方根滤波器代码,也就是else代码
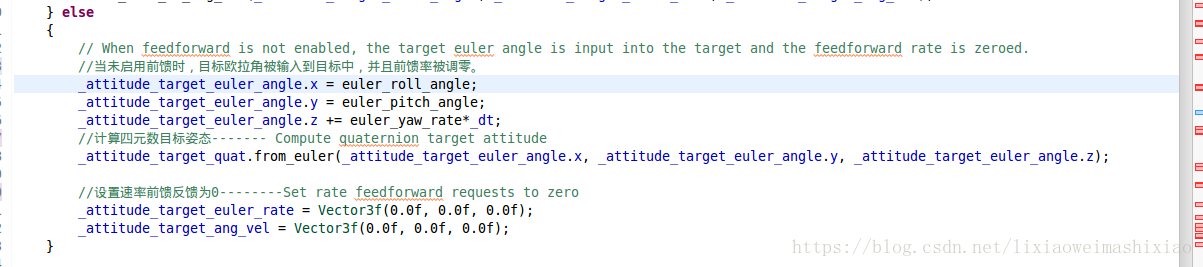
目标姿态角: _attitude_target_euler_angle.x = euler_roll_angle;
_attitude_target_euler_angle.y = euler_pitch_angle;
_attitude_target_euler_angle.z += euler_yaw_rate*_dt;
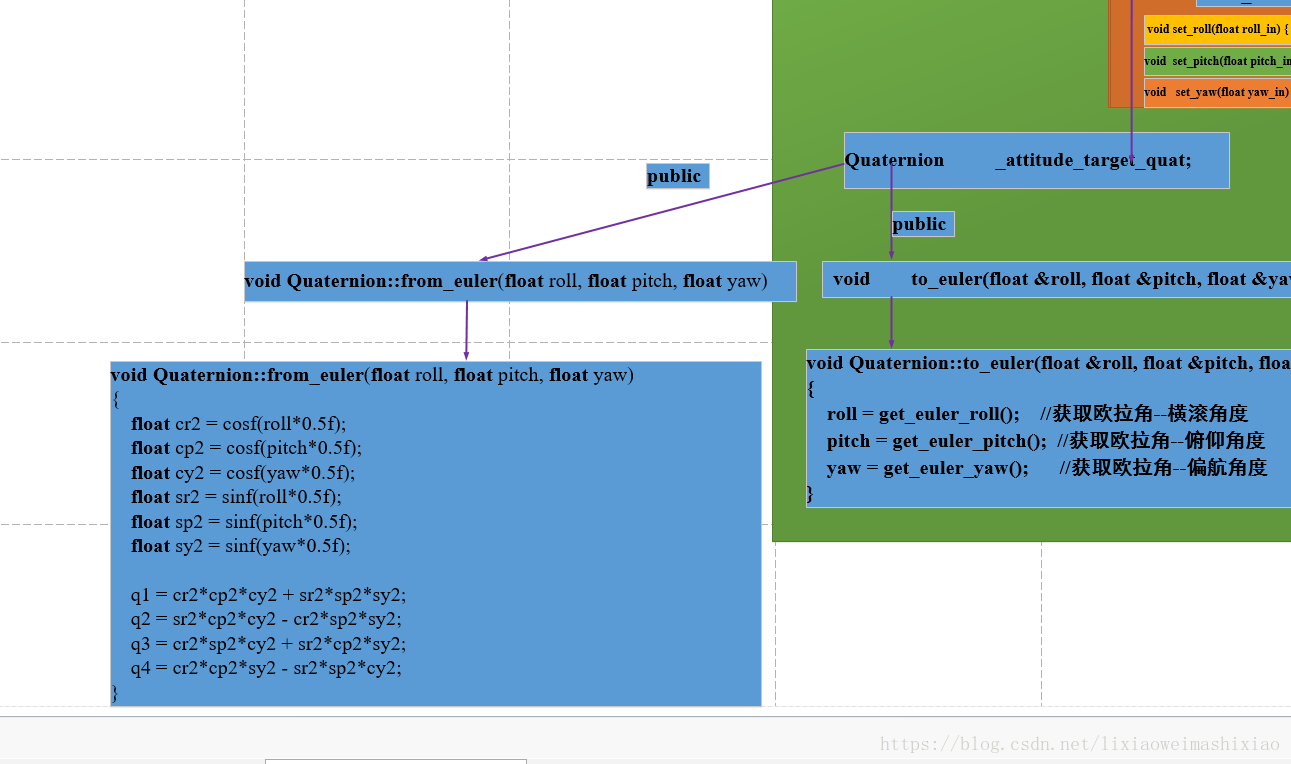
我们看下这个代码
_attitude_target_quat.from_euler(_attitude_target_euler_angle.x, _attitude_target_euler_angle.y, _attitude_target_euler_angle.z);
不进行速度前馈:
_attitude_target_euler_rate = Vector3f(0.0f, 0.0f, 0.0f);
_attitude_target_ang_vel = Vector3f(0.0f, 0.0f, 0.0f);
我们看下if(_rate_bf_ff_enabled & _use_ff_and_input_shaping)
1>>> Vector3f euler_accel = euler_accel_limit(_attitude_target_euler_angle, Vector3f(get_accel_roll_max_radss(), get_accel_pitch_max_radss(), get_accel_yaw_max_radss()));
Vector3f AC_AttitudeControl::euler_accel_limit(Vector3f euler_rad, Vector3f euler_accel)
{float sin_phi = constrain_float(fabsf(sinf(euler_rad.x)), 0.1f, 1.0f);float cos_phi = constrain_float(fabsf(cosf(euler_rad.x)), 0.1f, 1.0f);float sin_theta = constrain_float(fabsf(sinf(euler_rad.y)), 0.1f, 1.0f);Vector3f rot_accel;if(is_zero(euler_accel.x) || is_zero(euler_accel.y) || is_zero(euler_accel.z) || (euler_accel.x < 0.0f) || (euler_accel.y < 0.0f) || (euler_accel.z < 0.0f)) {rot_accel.x = euler_accel.x;rot_accel.y = euler_accel.y;rot_accel.z = euler_accel.z;} else{rot_accel.x = euler_accel.x;rot_accel.y = MIN(euler_accel.y/cos_phi, euler_accel.z/sin_phi);rot_accel.z = MIN(MIN(euler_accel.x/sin_theta, euler_accel.y/sin_phi), euler_accel.z/cos_phi);}return rot_accel;
}2>>>获取实际的姿态角速度
_attitude_target_euler_rate.x = input_shaping_angle(euler_roll_angle-_attitude_target_euler_angle.x, smoothing_gain, euler_accel.x, _attitude_target_euler_rate.x);_attitude_target_euler_rate.y = input_shaping_angle(euler_pitch_angle-_attitude_target_euler_angle.y, smoothing_gain, euler_accel.y, _attitude_target_euler_rate.y);// When yaw acceleration limiting is enabled, the yaw input shaper constrains angular acceleration about the yaw axis, slewing// the output rate towards the input rate.//偏航_attitude_target_euler_rate.z = input_shaping_ang_vel(_attitude_target_euler_rate.z, euler_yaw_rate, euler_accel.z);
//速率平方根前馈
float AC_AttitudeControl::input_shaping_angle(float error_angle, float smoothing_gain, float accel_max, float target_ang_vel)
{error_angle = wrap_PI(error_angle);// Calculate the velocity as error approaches zero with acceleration limited by accel_max_radssfloat ang_vel = sqrt_controller(error_angle, smoothing_gain, accel_max);// Acceleration is limited directly to smooth the beginning of the curve.if (accel_max > 0){float delta_ang_vel = accel_max * _dt;return constrain_float(ang_vel, target_ang_vel-delta_ang_vel, target_ang_vel+delta_ang_vel);} else{return ang_vel;}
}// limits the acceleration and deceleration of a velocity request
float AC_AttitudeControl::input_shaping_ang_vel(float target_ang_vel, float desired_ang_vel, float accel_max)
{if (accel_max > 0.0f){float delta_ang_vel = accel_max * _dt;target_ang_vel += constrain_float(desired_ang_vel - target_ang_vel, -delta_ang_vel, delta_ang_vel);} else{target_ang_vel = desired_ang_vel;}return target_ang_vel;
}3>>>将实际的欧拉角转化为机体速度
//将实际的姿态的欧拉角导数,转化到机体坐标系中速度矢量,作为前馈速度矢量
euler_rate_to_ang_vel(_attitude_target_euler_angle, _attitude_target_euler_rate, _attitude_target_ang_vel);
void AC_AttitudeControl::euler_rate_to_ang_vel(const Vector3f& euler_rad, const Vector3f& euler_rate_rads, Vector3f& ang_vel_rads)
{float sin_theta = sinf(euler_rad.y);float cos_theta = cosf(euler_rad.y);float sin_phi = sinf(euler_rad.x);float cos_phi = cosf(euler_rad.x);ang_vel_rads.x = euler_rate_rads.x - sin_theta * euler_rate_rads.z;ang_vel_rads.y = cos_phi * euler_rate_rads.y + sin_phi * cos_theta * euler_rate_rads.z;ang_vel_rads.z = -sin_phi * euler_rate_rads.y + cos_theta * cos_phi * euler_rate_rads.z;
}7》》调用四元数姿态控制器
attitude_controller_run_quat();
void AC_AttitudeControl::attitude_controller_run_quat()
{// Retrieve quaternion vehicle attitude// TODO add _ahrs.get_quaternion()Quaternion attitude_vehicle_quat;attitude_vehicle_quat.from_rotation_matrix(_ahrs.get_rotation_body_to_ned());// Compute attitude errorVector3f attitude_error_vector;thrust_heading_rotation_angles(_attitude_target_quat, attitude_vehicle_quat, attitude_error_vector, _thrust_error_angle);// Compute the angular velocity target from the attitude error_rate_target_ang_vel = update_ang_vel_target_from_att_error(attitude_error_vector);// Add feedforward term that attempts to ensure that roll and pitch errors rotate with the body frame rather than the reference frame._rate_target_ang_vel.x += attitude_error_vector.y * _ahrs.get_gyro().z;_rate_target_ang_vel.y += -attitude_error_vector.x * _ahrs.get_gyro().z;// Add the angular velocity feedforward, rotated into vehicle frameQuaternion attitude_target_ang_vel_quat = Quaternion(0.0f, _attitude_target_ang_vel.x, _attitude_target_ang_vel.y, _attitude_target_ang_vel.z);Quaternion attitude_error_quat = attitude_vehicle_quat.inverse() * _attitude_target_quat;Quaternion target_ang_vel_quat = attitude_error_quat.inverse()*attitude_target_ang_vel_quat*attitude_error_quat;// Correct the thrust vector and smoothly add feedforward and yaw inputif(_thrust_error_angle > AC_ATTITUDE_THRUST_ERROR_ANGLE*2.0f){_rate_target_ang_vel.z = _ahrs.get_gyro().z;}else if(_thrust_error_angle > AC_ATTITUDE_THRUST_ERROR_ANGLE){float flip_scalar = (1.0f - (_thrust_error_angle-AC_ATTITUDE_THRUST_ERROR_ANGLE)/AC_ATTITUDE_THRUST_ERROR_ANGLE);_rate_target_ang_vel.x += target_ang_vel_quat.q2*flip_scalar;_rate_target_ang_vel.y += target_ang_vel_quat.q3*flip_scalar;_rate_target_ang_vel.z += target_ang_vel_quat.q4;_rate_target_ang_vel.z = _ahrs.get_gyro().z*(1.0-flip_scalar) + _rate_target_ang_vel.z*flip_scalar;} else{_rate_target_ang_vel.x += target_ang_vel_quat.q2;_rate_target_ang_vel.y += target_ang_vel_quat.q3;_rate_target_ang_vel.z += target_ang_vel_quat.q4;}if (_rate_bf_ff_enabled & _use_ff_and_input_shaping){// rotate target and normalizeQuaternion attitude_target_update_quat;attitude_target_update_quat.from_axis_angle(Vector3f(_attitude_target_ang_vel.x * _dt, _attitude_target_ang_vel.y * _dt, _attitude_target_ang_vel.z * _dt));_attitude_target_quat = _attitude_target_quat * attitude_target_update_quat;_attitude_target_quat.normalize();}
}最后得到姿态PID控制输出量:
_rate_target_ang_vel.x += target_ang_vel_quat.q2;
_rate_target_ang_vel.y += target_ang_vel_quat.q3;
_rate_target_ang_vel.z += target_ang_vel_quat.q4;
具体先不分析,这里面还是很复杂
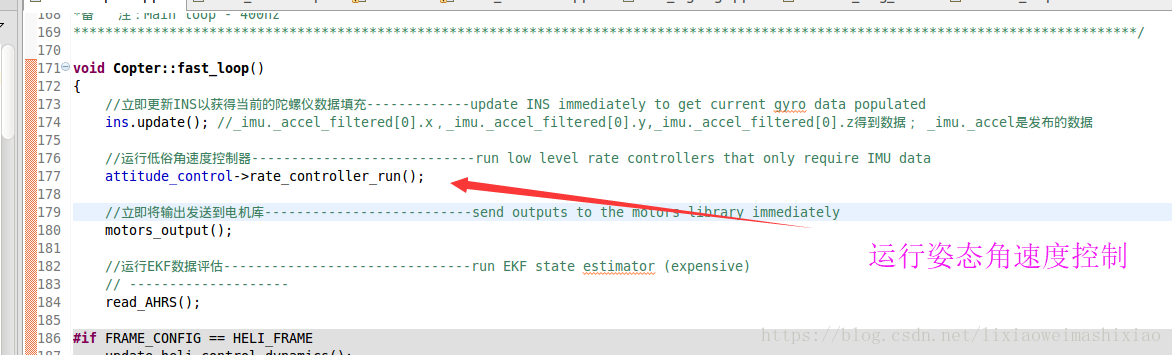
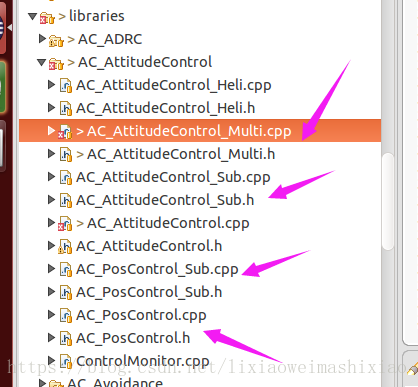
3.姿态角速度代码控制过程分析
可以看出:AC_AttitudeControl *attitude_control; //指针对象
virtual void rate_controller_run() = 0;是AC_AttitudeControl中的纯虚函数,不同子类去实现,我们以多旋翼为例,那就是AC_AttitudeControl_Multi中实现那个函数的功能
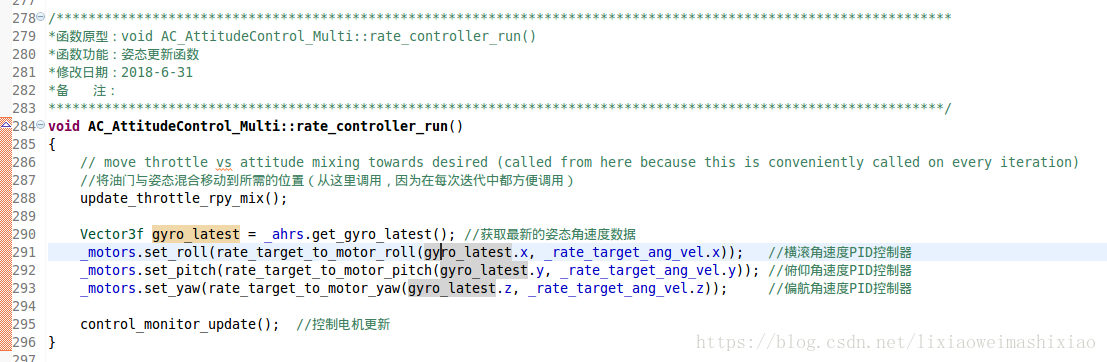
(1)更新油门到电机需要的值
void AC_AttitudeControl_Multi::update_throttle_rpy_mix()
void AC_AttitudeControl_Multi::update_throttle_rpy_mix()
{// slew _throttle_rpy_mix to _throttle_rpy_mix_desiredif (_throttle_rpy_mix < _throttle_rpy_mix_desired){// increase quickly (i.e. from 0.1 to 0.9 in 0.4 seconds)_throttle_rpy_mix += MIN(2.0f*_dt, _throttle_rpy_mix_desired-_throttle_rpy_mix);} else if (_throttle_rpy_mix > _throttle_rpy_mix_desired){// reduce more slowly (from 0.9 to 0.1 in 1.6 seconds)_throttle_rpy_mix -= MIN(0.5f*_dt, _throttle_rpy_mix-_throttle_rpy_mix_desired);}_throttle_rpy_mix = constrain_float(_throttle_rpy_mix, 0.1f, AC_ATTITUDE_CONTROL_MAX);
}(2)获取无人机的角速度信息
Vector3f gyro_latest = _ahrs.get_gyro_latest(); //获取最新的姿态角速度数据,
_rate_target_ang_vel.x,
_rate_target_ang_vel.y,
_rate_target_ang_vel.z表示姿态PID的输出量
(3)进行内环角速度环控制
_motors.set_roll(rate_target_to_motor_roll(gyro_latest.x, _rate_target_ang_vel.x)); //横滚角速度PID控制器 _motors.set_pitch(rate_target_to_motor_pitch(gyro_latest.y, _rate_target_ang_vel.y)); //俯仰角速度PID控制器 _motors.set_yaw(rate_target_to_motor_yaw(gyro_latest.z, _rate_target_ang_vel.z)); //偏航角速度PID控制器
我们首先看下:
**rate_target_to_motor_roll()
rate_target_to_motor_pitch()
rate_target_to_motor_yaw()**
--------------------------------------------------
--------------------------------------------------float AC_AttitudeControl::rate_target_to_motor_roll(float rate_actual_rads, float rate_target_rads)
{float rate_error_rads = rate_target_rads - rate_actual_rads; //误差=目标-实际的值// 传递误差到PID控制器---------pass error to PID controllerget_rate_roll_pid().set_input_filter_d(rate_error_rads);//微分控制器get_rate_roll_pid().set_desired_rate(rate_target_rads); //输入的目标值数据float integrator = get_rate_roll_pid().get_integrator();
// printf("ABCDE\r\n");// 确保只有输出饱和时才能减少积分器-----Ensure that integrator can only be reduced if the output is saturatedif (!_motors.limit.roll_pitch || ((integrator > 0 && rate_error_rads < 0) || (integrator < 0 && rate_error_rads > 0))){
// printf("ABCD\r\n");integrator = get_rate_roll_pid().get_i();}//计算输出范围是: -1 ~ +1float output = get_rate_roll_pid().get_p() + integrator + get_rate_roll_pid().get_d() + get_rate_roll_pid().get_ff(rate_target_rads);//限制输出范围在:-1~+1之间------------Constrain outputreturn constrain_float(output, -1.0f, 1.0f);
}
--------------------------------------------------
--------------------------------------------------
float AC_AttitudeControl::rate_target_to_motor_pitch(float rate_actual_rads, float rate_target_rads)
{float rate_error_rads = rate_target_rads - rate_actual_rads;// 传递误差到PID控制器---------pass error to PID controllerget_rate_pitch_pid().set_input_filter_d(rate_error_rads);get_rate_pitch_pid().set_desired_rate(rate_target_rads);float integrator = get_rate_pitch_pid().get_integrator();// 确保只有输出饱和时才能减少积分器-----Ensure that integrator can only be reduced if the output is saturatedif (!_motors.limit.roll_pitch || ((integrator > 0 && rate_error_rads < 0) || (integrator < 0 && rate_error_rads > 0))) {integrator = get_rate_pitch_pid().get_i();}//计算输出范围是: -1 ~ +1float output = get_rate_pitch_pid().get_p() + integrator + get_rate_pitch_pid().get_d() + get_rate_pitch_pid().get_ff(rate_target_rads);//限制输出范围在:-1~+1之间------------Constrain outputreturn constrain_float(output, -1.0f, 1.0f);
}
--------------------------------------------------
--------------------------------------------------
float AC_AttitudeControl::rate_target_to_motor_yaw(float rate_actual_rads, float rate_target_rads)
{float rate_error_rads = rate_target_rads - rate_actual_rads;// 传递误差到PID控制器---------pass error to PID controllerget_rate_yaw_pid().set_input_filter_all(rate_error_rads);get_rate_yaw_pid().set_desired_rate(rate_target_rads);float integrator = get_rate_yaw_pid().get_integrator();// 确保只有输出饱和时才能减少积分器-----Ensure that integrator can only be reduced if the output is saturatedif (!_motors.limit.yaw || ((integrator > 0 && rate_error_rads < 0) || (integrator < 0 && rate_error_rads > 0))) {integrator = get_rate_yaw_pid().get_i();}//计算输出范围是: -1 ~ +1float output = get_rate_yaw_pid().get_p() + integrator + get_rate_yaw_pid().get_d() + get_rate_yaw_pid().get_ff(rate_target_rads);//限制输出范围在:-1~+1之间------------Constrain outputreturn constrain_float(output, -1.0f, 1.0f);
}运算之后,传入:
void set_roll(float roll_in) { _roll_in = roll_in; }; // range -1 ~ +1
void set_pitch(float pitch_in) { _pitch_in = pitch_in; }; // range -1 ~ +1
void set_yaw(float yaw_in) { _yaw_in = yaw_in; }; // range -1 ~ +1**
到这里我们得到陀螺仪角速度与目标角速度的PID控制输出量:
横滚角速度PID=_roll_in
俯仰角速度PID=_pitch_in
偏航角速度PID=_yaw_in
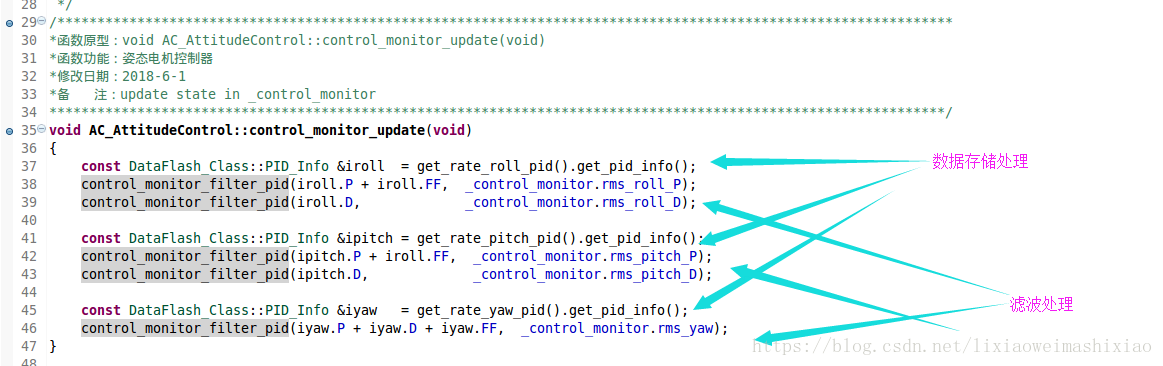
(4)更新控制监视器
void AC_AttitudeControl::control_monitor_update(void)
void AC_AttitudeControl::control_monitor_update(void)
{const DataFlash_Class::PID_Info &iroll = get_rate_roll_pid().get_pid_info();control_monitor_filter_pid(iroll.P + iroll.FF, _control_monitor.rms_roll_P);control_monitor_filter_pid(iroll.D, _control_monitor.rms_roll_D);const DataFlash_Class::PID_Info &ipitch = get_rate_pitch_pid().get_pid_info();control_monitor_filter_pid(ipitch.P + iroll.FF, _control_monitor.rms_pitch_P);control_monitor_filter_pid(ipitch.D, _control_monitor.rms_pitch_D);const DataFlash_Class::PID_Info &iyaw = get_rate_yaw_pid().get_pid_info();control_monitor_filter_pid(iyaw.P + iyaw.D + iyaw.FF, _control_monitor.rms_yaw);
}
AC_PID& get_rate_roll_pid() { return _pid_rate_roll; }
AC_PID& get_rate_pitch_pid() { return _pid_rate_pitch; }
AC_PID& get_rate_yaw_pid() { return _pid_rate_yaw; }
void AC_AttitudeControl::control_monitor_filter_pid(float value, float &rms)
{const float filter_constant = 0.99f;// we don't do the sqrt() here as it is quite expensive. That is// done when reporting a resultrms = filter_constant * rms + (1.0f - filter_constant) * sq(value);
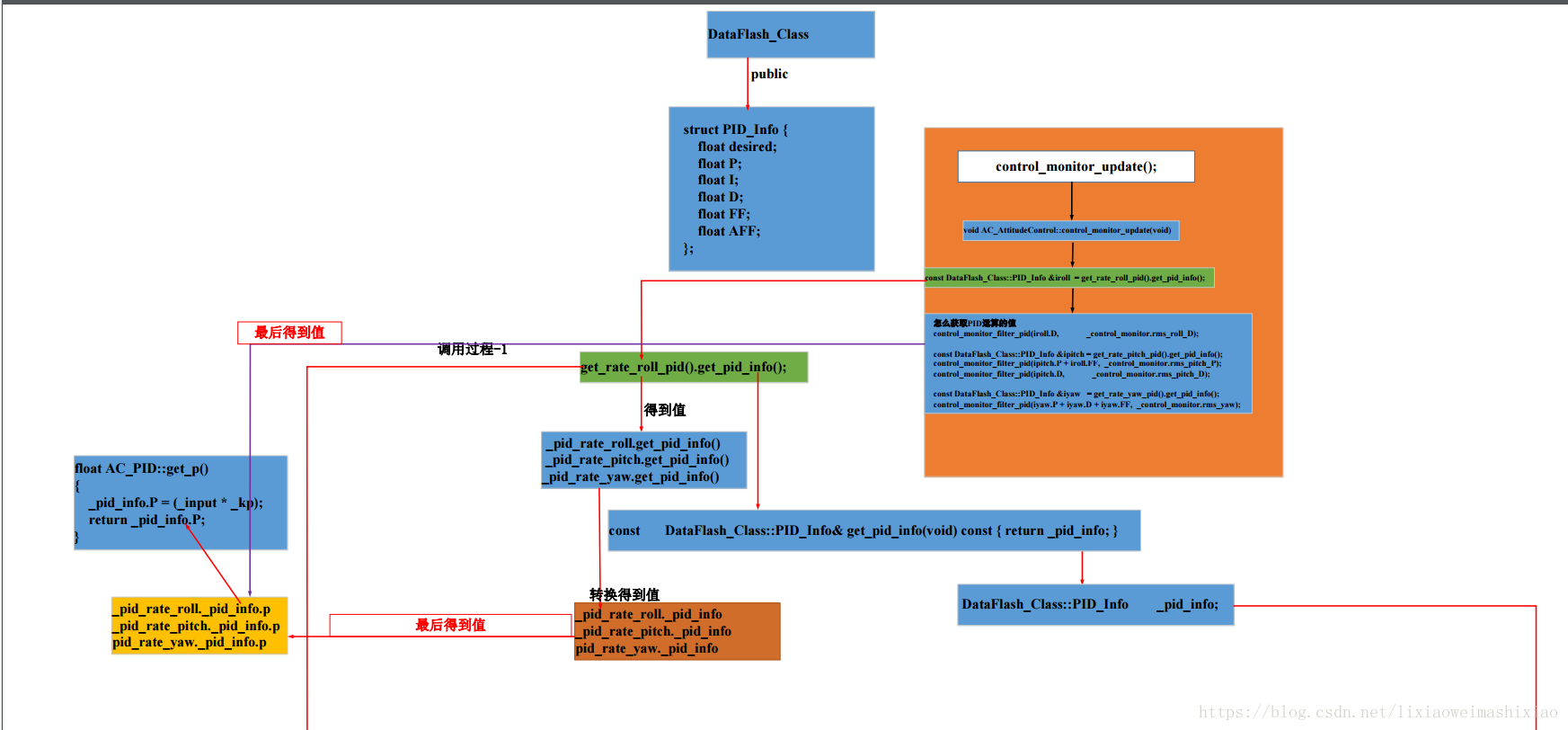
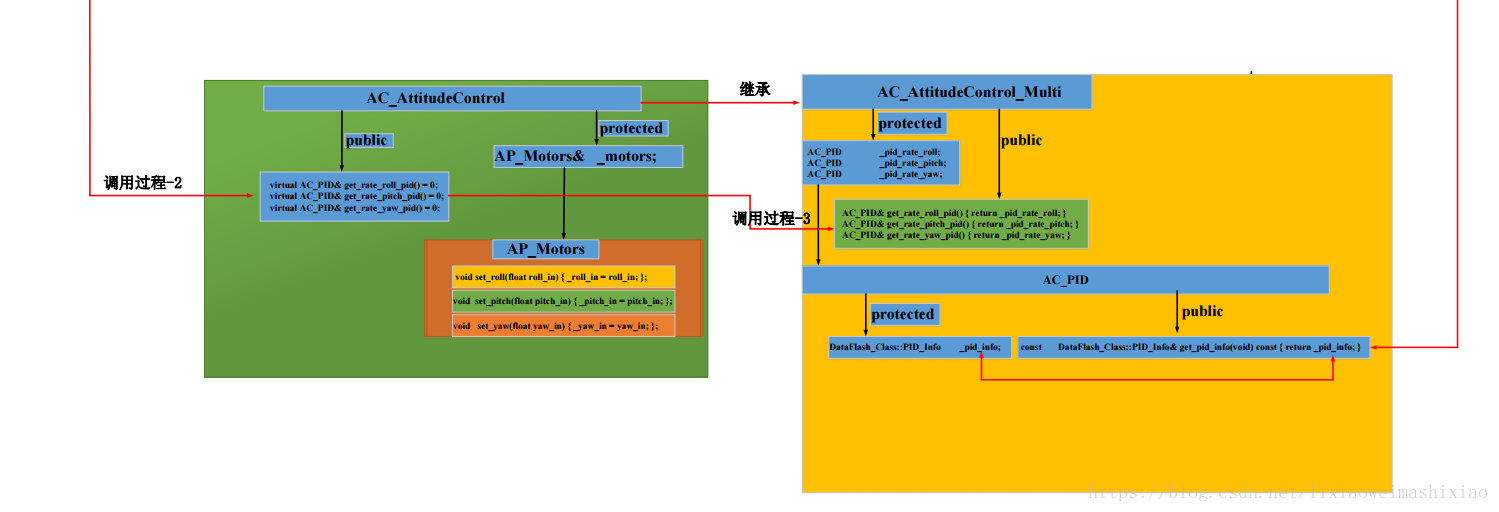
}到这里你是否有一个疑惑?就是
_control_monitor.rms_roll_P
_control_monitor.rms_pitch_P
_control_monitor.rms_yaw
与
_pid_rate_roll
_pid_rate_pitch
_pid_rate_yaw
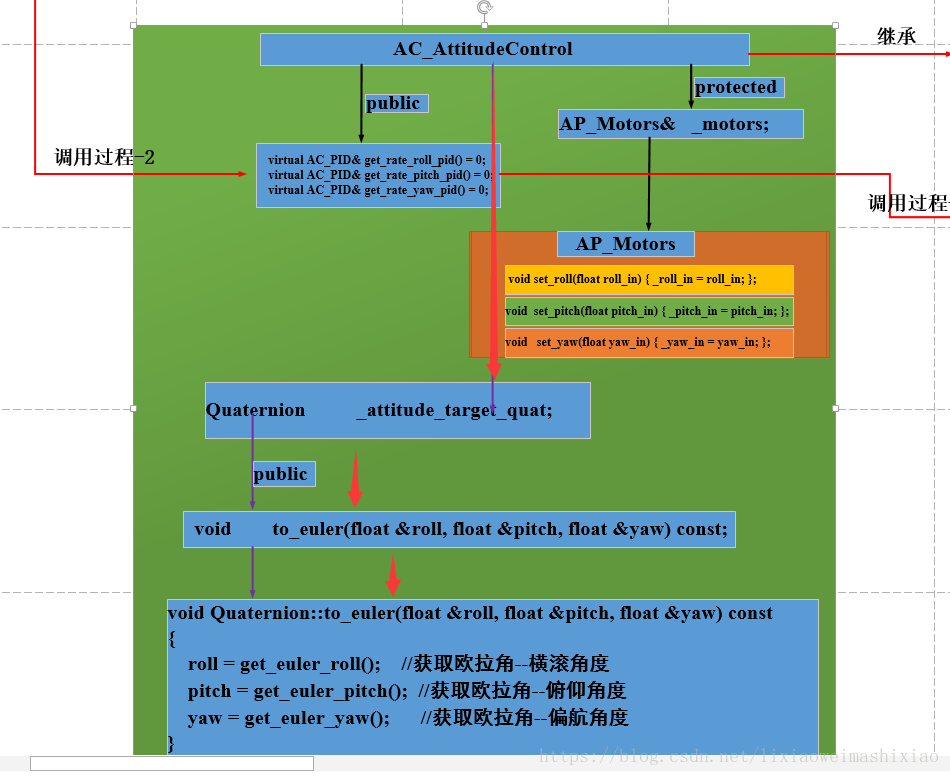
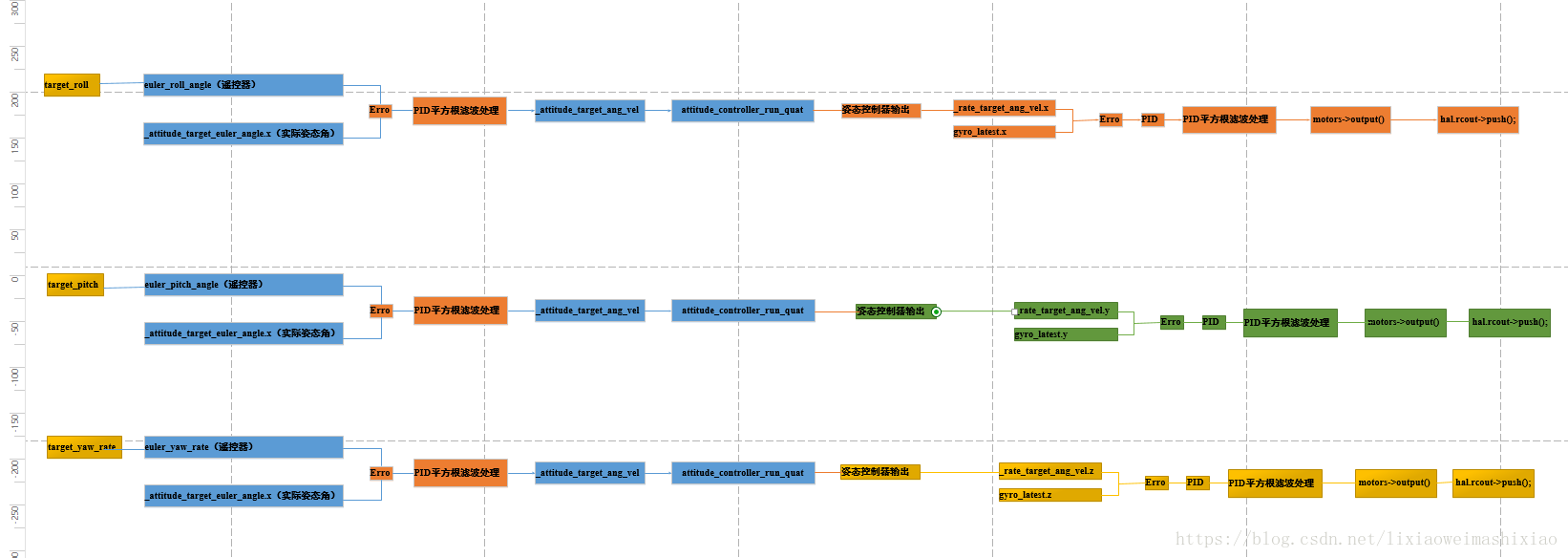
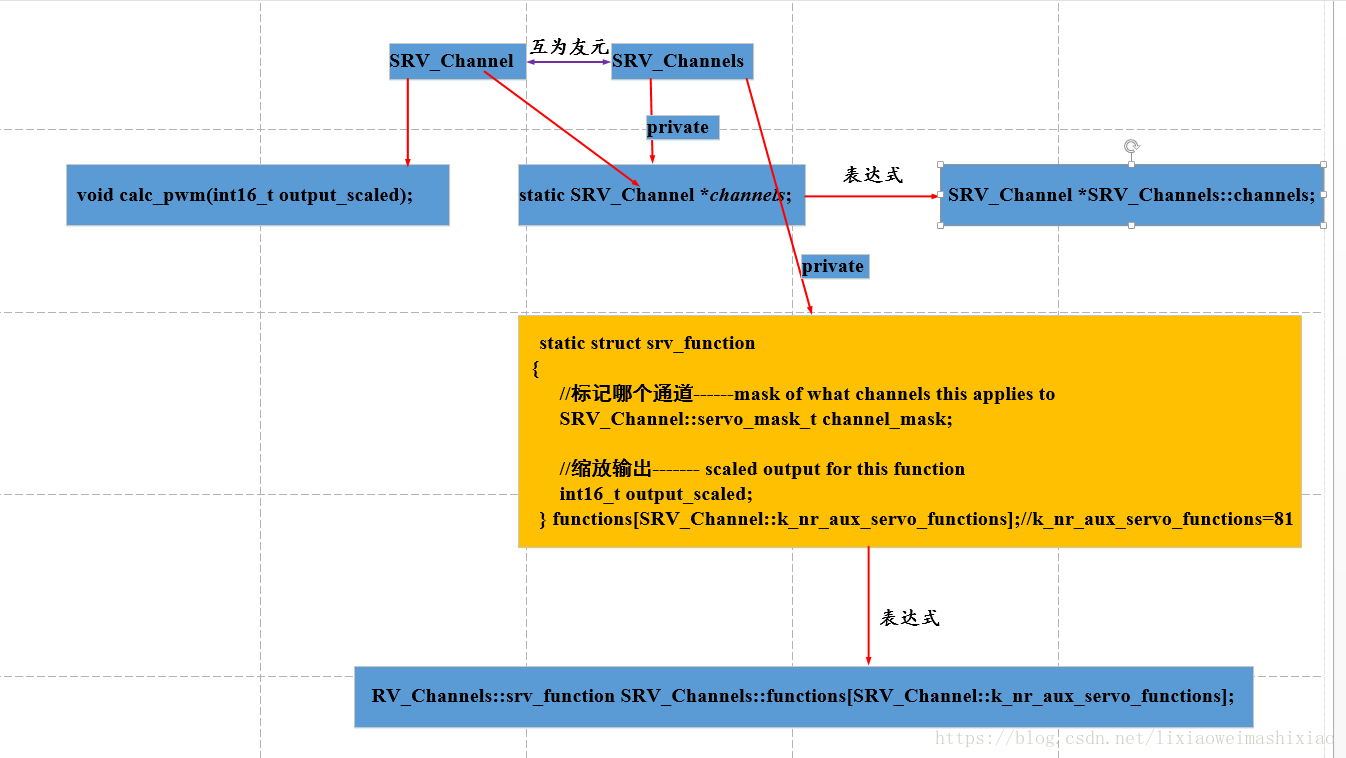
然后怎么连接上面(3)_roll_in,_pitch_in,_yaw_in之间的联系起来的。要想弄明白这个我们必须看各个类之间怎么实现的关系,这里我还是用Visio图画出来,(需要完整图的可以联系我,这里没法上传清晰的)
这里有个疑惑就是还没解决?
_motors.set_roll(rate_target_to_motor_roll(gyro_latest.x, _rate_target_ang_vel.x)); //横滚角速度PID控制器_motors.set_pitch(rate_target_to_motor_pitch(gyro_latest.y, _rate_target_ang_vel.y)); //俯仰角速度PID控制器_motors.set_yaw(rate_target_to_motor_yaw(gyro_latest.z, _rate_target_ang_vel.z)); //偏航角速度PID控制器与_control_monitor.rms_roll_P, _control_monitor.rms_roll_D, _control_monitor.rms_pitch_P,_control_monitor.rms_pitch_D
_control_monitor.rms_yaw之间怎么联系起来,我个人感觉还是在上面那个流程图,不过看不懂也没事,我们继续看代码,说不定后面会给提示
4.电机PWM控制运算
我们先看下代码,然后对代码进行详细分析;
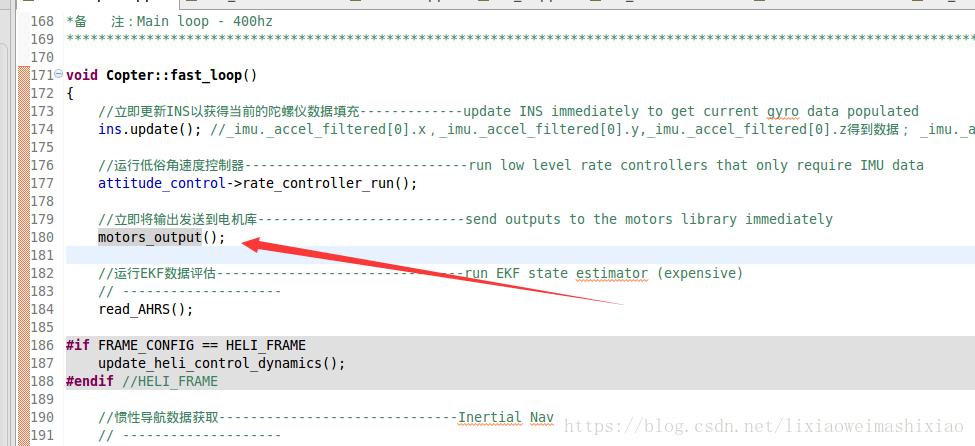
void Copter::motors_output()
{
#if ADVANCED_FAILSAFE == ENABLED// this is to allow the failsafe module to deliberately crash // the vehicle. Only used in extreme circumstances to meet the// OBC rulesif (g2.afs.should_crash_vehicle()) //这是为了允许故障安全模块故意崩溃。车辆。只有在极端情况下才能满足OBC规则{g2.afs.terminate_vehicle();return;}
#endif//解锁延迟,也就是机器解锁后不立即启动,延迟2s-----Update arming delay stateif (ap.in_arming_delay && (!motors->armed() || millis()-arm_time_ms > ARMING_DELAY_SEC*1.0e3f || control_mode == THROW)){ap.in_arming_delay = false;}//输出所有的伺服通道--------------------------output any servo channelsSRV_Channels::calc_pwm(); //output_pwm//立即触发,所有通道输出----------------------cork now, so that all channel outputs happen at oncehal.rcout->cork();//在任何AUX通道上更新输出,手动通行-------------update output on any aux channels, for manual passthruSRV_Channels::output_ch_all();//检查我们是否执行电机测试---------------------check if we are performing the motor testif (ap.motor_test){motor_test_output(); //测试电机函数} else{bool interlock = motors->armed() && !ap.in_arming_delay && (!ap.using_interlock || ap.motor_interlock_switch) && !ap.motor_emergency_stop;if (!motors->get_interlock() && interlock){motors->set_interlock(true);Log_Write_Event(DATA_MOTORS_INTERLOCK_ENABLED);} else if (motors->get_interlock() && !interlock){motors->set_interlock(false);Log_Write_Event(DATA_MOTORS_INTERLOCK_DISABLED);}//向马达发送输出信号----------------------send output signals to motorsmotors->output();}//发送到所有通道------------------------------push all channelshal.rcout->push();
}(1)故障测试代码(这里不分析)
#if ADVANCED_FAILSAFE == ENABLED// this is to allow the failsafe module to deliberately crash // the vehicle. Only used in extreme circumstances to meet the// OBC rulesif (g2.afs.should_crash_vehicle()) //这是为了允许故障安全模块故意崩溃。车辆。只有在极端情况下才能满足OBC规则{g2.afs.terminate_vehicle();return;}
#endif(2)解锁延迟函数(这里可以通过地面站设置解锁延迟时间不分析)
//解锁延迟,也就是机器解锁后不立即启动,延迟2s-----Update arming delay stateif (ap.in_arming_delay && (!motors->armed() || millis()-arm_time_ms > ARMING_DELAY_SEC*1.0e3f || control_mode == THROW)){ap.in_arming_delay = false;}(3)计算需要的PWM
这里要注意上面(2)算的值怎么传送到这里的!!!(??)
SRV_Channels::calc_pwm(); //output_pwm
hal.rcout->cork();
SRV_Channels::output_ch_all();
if (ap.motor_test)
{
motor_test_output(); //测试电机函数
}
#define NUM_SERVO_CHANNELS 16
void SRV_Channel::calc_pwm(int16_t output_scaled)
{if (have_pwm_mask & (1U<<ch_num)){return;}uint16_t pwm;if (type_angle){pwm = pwm_from_angle(output_scaled); //计算角度} else{pwm = pwm_from_range(output_scaled);}set_output_pwm(pwm);
}
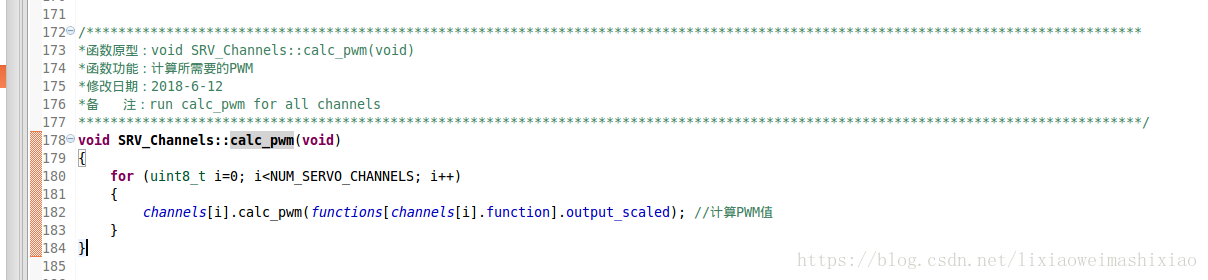
重点要分析这个函数怎么输入的值:
channels[i].calc_pwm(functions[channels[i].function].output_scaled); //计算PWM值**
我们先不分析先往后看代码
motors->output();
看下motors之间的类属关系
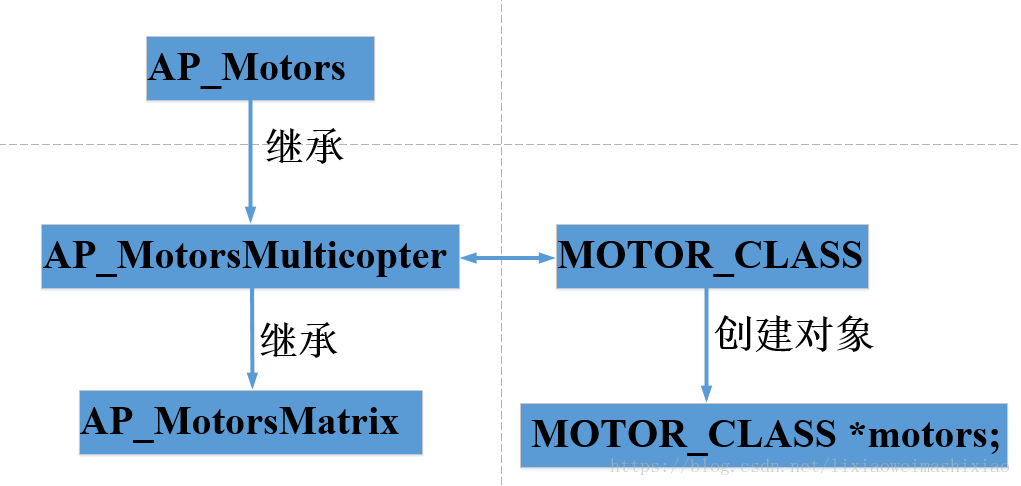
void AP_MotorsMulticopter::output()
{//更新油门滤波,进行一阶低通滤波处理------------------------------------update throttle filterupdate_throttle_filter();//跟新电池电阻-(确保大机动运动时候,电池电压稳定)------------------------update battery resistanceupdate_battery_resistance();//计算电池电压的最大升力值---------------------------------------------calc filtered battery voltage and lift_maxupdate_lift_max_from_batt_voltage();// 输出设置阶段------------------------------------------------------run spool logicoutput_logic();//计算所需要的推力----------------------------------------------------calculate thrustoutput_armed_stabilizing();//申请对无人机结构补偿-------------------------------------------------apply any thrust compensation for the framethrust_compensation();//将推力转换成PWM---------------------- convert rpy_thrust values to pwmoutput_to_motors();
};1》》更新油门滤波update_throttle_filter();
void AP_MotorsMulticopter::update_throttle_filter()
{if (armed()){_throttle_filter.apply(_throttle_in, 1.0f/_loop_rate); //低通滤波// constrain filtered throttleif (_throttle_filter.get() < 0.0f){_throttle_filter.reset(0.0f);}if (_throttle_filter.get() > 1.0f){_throttle_filter.reset(1.0f);}} else{_throttle_filter.reset(0.0f);}
}2》》更新电池电压估计update_battery_resistance();
这里我们重点看下这个函数: output_armed_stabilizing();
void AP_MotorsMulticopter::update_battery_resistance()
{// if disarmed reset resting voltage and currentif (!_flags.armed){_batt_voltage_resting = _batt_voltage;_batt_current_resting = _batt_current;_batt_timer = 0;} else if (_batt_voltage_resting > _batt_voltage && _batt_current_resting < _batt_current){// update battery resistance when throttle is over hover throttlefloat batt_resistance = (_batt_voltage_resting-_batt_voltage)/(_batt_current-_batt_current_resting);if ((_batt_timer < 400) && ((_batt_current_resting*2.0f) < _batt_current)) {if (get_throttle() >= get_throttle_hover()) {// filter reaches 90% in 1/4 the test time_batt_resistance += 0.05f*(batt_resistance - _batt_resistance);_batt_timer += 1;} else {// initialize battery resistance to prevent change in resting voltage estimate_batt_resistance = batt_resistance;}}// make sure battery resistance value doesn't result in the predicted battery voltage exceeding the resting voltageif(batt_resistance < _batt_resistance){_batt_resistance = batt_resistance;}}
}3》》根据电压计算电池所能提供的最大升力
void AP_MotorsMulticopter::update_lift_max_from_batt_voltage()
{// sanity check battery_voltage_min is not too small// if disabled or misconfigured exit immediatelyif((_batt_voltage_max <= 0) || (_batt_voltage_min >= _batt_voltage_max) || (_batt_voltage < 0.25f*_batt_voltage_min)) {_batt_voltage_filt.reset(1.0f);_lift_max = 1.0f;return;}_batt_voltage_min = MAX(_batt_voltage_min, _batt_voltage_max * 0.6f);// add current based voltage sag to battery voltagefloat batt_voltage = _batt_voltage + (_batt_current-_batt_current_resting) * _batt_resistance;batt_voltage = constrain_float(batt_voltage, _batt_voltage_min, _batt_voltage_max);// filter at 0.5 Hzfloat batt_voltage_filt = _batt_voltage_filt.apply(batt_voltage/_batt_voltage_max, 1.0f/_loop_rate);// calculate lift max_lift_max = batt_voltage_filt*(1-_thrust_curve_expo) + _thrust_curve_expo*batt_voltage_filt*batt_voltage_filt;
}4》》电机状态机设置
**SHUT_DOWN :Motors停转无输出,Servos输出保持中位或测试条件值
SPIN_WHEN_ARMED :Motors停转无输出或者开始输出旋转,Servos开始输出
SPOOL_UP :Motors最大油门输出,Servos正常输出
THROTTLE_UNLIMITED :Motors正常输出,Servos正常输出
SPOOL_DOWN :Motors最小输出,Servos正常输出**
void AP_MotorsMulticopter::output_logic()
{if (_flags.armed) {_disarm_safety_timer = 100;} else if (_disarm_safety_timer != 0) {_disarm_safety_timer--;}// force desired and current spool mode if disarmed or not interlockedif (!_flags.armed || !_flags.interlock) {_spool_desired = DESIRED_SHUT_DOWN;_spool_mode = SHUT_DOWN;}if (_spool_up_time < 0.05) {// prevent float exception_spool_up_time.set(0.05);}switch (_spool_mode) {case SHUT_DOWN:// Motors should be stationary.// Servos set to their trim values or in a test condition.// set limits flagslimit.roll_pitch = true;limit.yaw = true;limit.throttle_lower = true;limit.throttle_upper = true;// make sure the motors are spooling in the correct directionif (_spool_desired != DESIRED_SHUT_DOWN) {_spool_mode = SPIN_WHEN_ARMED;break;}// set and increment ramp variables_spin_up_ratio = 0.0f;_throttle_thrust_max = 0.0f;break;case SPIN_WHEN_ARMED: {// Motors should be stationary or at spin when armed.// Servos should be moving to correct the current attitude.// set limits flagslimit.roll_pitch = true;limit.yaw = true;limit.throttle_lower = true;limit.throttle_upper = true;// set and increment ramp variablesfloat spool_step = 1.0f/(_spool_up_time*_loop_rate);if (_spool_desired == DESIRED_SHUT_DOWN){_spin_up_ratio -= spool_step;// constrain ramp value and update modeif (_spin_up_ratio <= 0.0f) {_spin_up_ratio = 0.0f;_spool_mode = SHUT_DOWN;}} else if(_spool_desired == DESIRED_THROTTLE_UNLIMITED) {_spin_up_ratio += spool_step;// constrain ramp value and update modeif (_spin_up_ratio >= 1.0f) {_spin_up_ratio = 1.0f;_spool_mode = SPOOL_UP;}} else { // _spool_desired == SPIN_WHEN_ARMEDfloat spin_up_armed_ratio = 0.0f;if (_spin_min > 0.0f) {spin_up_armed_ratio = _spin_arm / _spin_min;}_spin_up_ratio += constrain_float(spin_up_armed_ratio-_spin_up_ratio, -spool_step, spool_step);}_throttle_thrust_max = 0.0f;break;}case SPOOL_UP:// Maximum throttle should move from minimum to maximum.// Servos should exhibit normal flight behavior.// initialize limits flagslimit.roll_pitch = false;limit.yaw = false;limit.throttle_lower = false;limit.throttle_upper = false;// make sure the motors are spooling in the correct directionif (_spool_desired != DESIRED_THROTTLE_UNLIMITED ){_spool_mode = SPOOL_DOWN;break;}// set and increment ramp variables_spin_up_ratio = 1.0f;_throttle_thrust_max += 1.0f/(_spool_up_time*_loop_rate);// constrain ramp value and update modeif (_throttle_thrust_max >= MIN(get_throttle(), get_current_limit_max_throttle())) {_throttle_thrust_max = get_current_limit_max_throttle();_spool_mode = THROTTLE_UNLIMITED;} else if (_throttle_thrust_max < 0.0f) {_throttle_thrust_max = 0.0f;}break;case THROTTLE_UNLIMITED:// Throttle should exhibit normal flight behavior.// Servos should exhibit normal flight behavior.// initialize limits flagslimit.roll_pitch = false;limit.yaw = false;limit.throttle_lower = false;limit.throttle_upper = false;// make sure the motors are spooling in the correct directionif (_spool_desired != DESIRED_THROTTLE_UNLIMITED) {_spool_mode = SPOOL_DOWN;break;}// set and increment ramp variables_spin_up_ratio = 1.0f;_throttle_thrust_max = get_current_limit_max_throttle();break;case SPOOL_DOWN:// Maximum throttle should move from maximum to minimum.// Servos should exhibit normal flight behavior.// initialize limits flagslimit.roll_pitch = false;limit.yaw = false;limit.throttle_lower = false;limit.throttle_upper = false;// make sure the motors are spooling in the correct directionif (_spool_desired == DESIRED_THROTTLE_UNLIMITED) {_spool_mode = SPOOL_UP;break;}// set and increment ramp variables_spin_up_ratio = 1.0f;_throttle_thrust_max -= 1.0f/(_spool_up_time*_loop_rate);// constrain ramp value and update modeif (_throttle_thrust_max <= 0.0f){_throttle_thrust_max = 0.0f;}if (_throttle_thrust_max >= get_current_limit_max_throttle()) {_throttle_thrust_max = get_current_limit_max_throttle();} else if (is_zero(_throttle_thrust_max)) {_spool_mode = SPIN_WHEN_ARMED;}break;}
}5》》计算所需要的推力output_armed_stabilizing();
void AP_MotorsMatrix::output_armed_stabilizing()
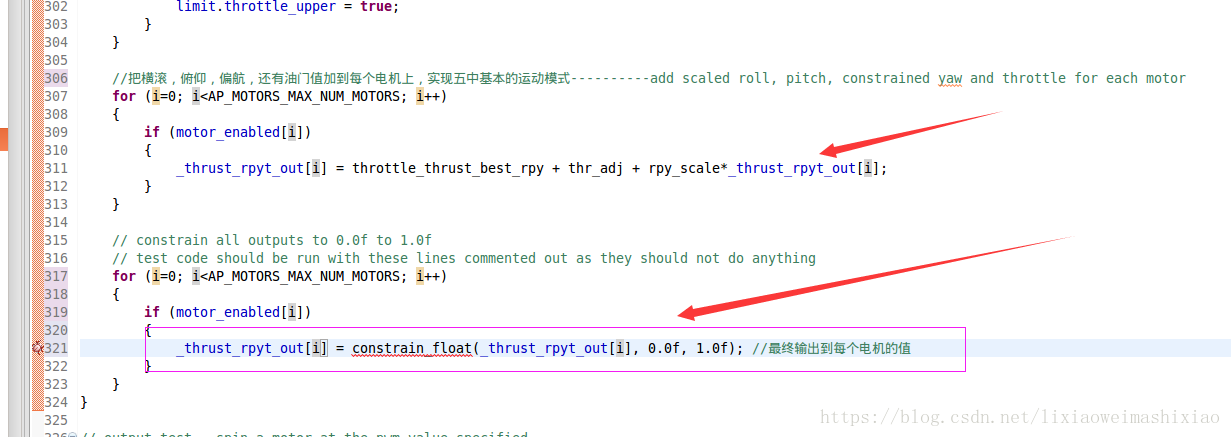
{uint8_t i; // general purpose counterfloat roll_thrust; // roll thrust input value, +/- 1.0float pitch_thrust; // pitch thrust input value, +/- 1.0float yaw_thrust; // yaw thrust input value, +/- 1.0float throttle_thrust; // throttle thrust input value, 0.0 - 1.0float throttle_thrust_best_rpy; // throttle providing maximum roll, pitch and yaw range without climbingfloat rpy_scale = 1.0f; // this is used to scale the roll, pitch and yaw to fit within the motor limitsfloat rpy_low = 0.0f; // lowest motor valuefloat rpy_high = 0.0f; // highest motor valuefloat yaw_allowed = 1.0f; // amount of yaw we can fit infloat unused_range; // amount of yaw we can fit in the current channelfloat thr_adj; // the difference between the pilot's desired throttle and throttle_thrust_best_rpy//申请电压和气压补偿----------------------apply voltage and air pressure compensationroll_thrust = _roll_in * get_compensation_gain(); //横滚推力计算pitch_thrust = _pitch_in * get_compensation_gain(); //俯仰推力计算yaw_thrust = _yaw_in * get_compensation_gain(); //偏航推力计算throttle_thrust = get_throttle() * get_compensation_gain(); //垂直升力计算//检查油门值是0或者比限制的值低------------------sanity check throttle is above zero and below current limited throttleif (throttle_thrust <= 0.0f) {throttle_thrust = 0.0f;limit.throttle_lower = true;}if (throttle_thrust >= _throttle_thrust_max) {throttle_thrust = _throttle_thrust_max;limit.throttle_upper = true;}_throttle_avg_max = constrain_float(_throttle_avg_max, throttle_thrust, _throttle_thrust_max); //油门最大值// calculate throttle that gives most possible room for yaw which is the lower of:// 1. 0.5f - (rpy_low+rpy_high)/2.0 - this would give the maximum possible margin above the highest motor and below the lowest// 2. the higher of:// a) the pilot's throttle input// b) the point _throttle_rpy_mix between the pilot's input throttle and hover-throttle// Situation #2 ensure we never increase the throttle above hover throttle unless the pilot has commanded this.// Situation #2b allows us to raise the throttle above what the pilot commanded but not so far that it would actually cause the copter to rise.// We will choose #1 (the best throttle for yaw control) if that means reducing throttle to the motors (i.e. we favor reducing throttle *because* it provides better yaw control)// We will choose #2 (a mix of pilot and hover throttle) only when the throttle is quite low. We favor reducing throttle instead of better yaw control because the pilot has commanded it// calculate amount of yaw we can fit into the throttle range// this is always equal to or less than the requested yaw from the pilot or rate controllerthrottle_thrust_best_rpy = MIN(0.5f, _throttle_avg_max);// calculate roll and pitch for each motor// calculate the amount of yaw input that each motor can acceptfor (i=0; i<AP_MOTORS_MAX_NUM_MOTORS; i++) {if (motor_enabled[i]){_thrust_rpyt_out[i] = roll_thrust * _roll_factor[i] + pitch_thrust * _pitch_factor[i];if (!is_zero(_yaw_factor[i])){if (yaw_thrust * _yaw_factor[i] > 0.0f){unused_range = fabsf((1.0f - (throttle_thrust_best_rpy + _thrust_rpyt_out[i]))/_yaw_factor[i]);if (yaw_allowed > unused_range){yaw_allowed = unused_range;}} else{unused_range = fabsf((throttle_thrust_best_rpy + _thrust_rpyt_out[i])/_yaw_factor[i]);if (yaw_allowed > unused_range) {yaw_allowed = unused_range;}}}}}// todo: make _yaw_headroom 0 to 1yaw_allowed = MAX(yaw_allowed, (float)_yaw_headroom/1000.0f);if (fabsf(yaw_thrust) > yaw_allowed) {yaw_thrust = constrain_float(yaw_thrust, -yaw_allowed, yaw_allowed);limit.yaw = true;}// add yaw to intermediate numbers for each motorrpy_low = 0.0f;rpy_high = 0.0f;for (i=0; i<AP_MOTORS_MAX_NUM_MOTORS; i++) {if (motor_enabled[i]) {_thrust_rpyt_out[i] = _thrust_rpyt_out[i] + yaw_thrust * _yaw_factor[i];// record lowest roll+pitch+yaw commandif (_thrust_rpyt_out[i] < rpy_low) {rpy_low = _thrust_rpyt_out[i];}// record highest roll+pitch+yaw commandif (_thrust_rpyt_out[i] > rpy_high) {rpy_high = _thrust_rpyt_out[i];}}}// check everything fitsthrottle_thrust_best_rpy = MIN(0.5f - (rpy_low+rpy_high)/2.0, _throttle_avg_max);if (is_zero(rpy_low)){rpy_scale = 1.0f;} else {rpy_scale = constrain_float(-throttle_thrust_best_rpy/rpy_low, 0.0f, 1.0f);}// calculate how close the motors can come to the desired throttlethr_adj = throttle_thrust - throttle_thrust_best_rpy;if (rpy_scale < 1.0f){// Full range is being used by roll, pitch, and yaw.limit.roll_pitch = true;limit.yaw = true;if (thr_adj > 0.0f) {limit.throttle_upper = true;}thr_adj = 0.0f;} else {if (thr_adj < -(throttle_thrust_best_rpy+rpy_low)){// Throttle can't be reduced to desired valuethr_adj = -(throttle_thrust_best_rpy+rpy_low);} else if (thr_adj > 1.0f - (throttle_thrust_best_rpy+rpy_high)){// Throttle can't be increased to desired valuethr_adj = 1.0f - (throttle_thrust_best_rpy+rpy_high);limit.throttle_upper = true;}}// add scaled roll, pitch, constrained yaw and throttle for each motorfor (i=0; i<AP_MOTORS_MAX_NUM_MOTORS; i++){if (motor_enabled[i]){_thrust_rpyt_out[i] = throttle_thrust_best_rpy + thr_adj + rpy_scale*_thrust_rpyt_out[i];}}// constrain all outputs to 0.0f to 1.0f// test code should be run with these lines commented out as they should not do anythingfor (i=0; i<AP_MOTORS_MAX_NUM_MOTORS; i++) {if (motor_enabled[i]) {_thrust_rpyt_out[i] = constrain_float(_thrust_rpyt_out[i], 0.0f, 1.0f);}}
}其中有一些需要注意的参数:_roll_factor[i],_pitch_factor[i],_yaw_factor[i]是有正负的,可以看出是来自:
void AP_Motors6DOF::setup_motors(motor_frame_class frame_class, motor_frame_type frame_type)
{// remove existing motorsfor (int8_t i=0; i<AP_MOTORS_MAX_NUM_MOTORS; i++) {remove_motor(i);}// hard coded config for supported framesswitch ((sub_frame_t)frame_class) {// Motor # Roll Factor Pitch Factor Yaw Factor Throttle Factor Forward Factor Lateral Factor Testing Ordercase SUB_FRAME_BLUEROV1:add_motor_raw_6dof(AP_MOTORS_MOT_1, 0, 0, -1.0f, 0, 1.0f, 0, 1);add_motor_raw_6dof(AP_MOTORS_MOT_2, 0, 0, 1.0f, 0, 1.0f, 0, 2);add_motor_raw_6dof(AP_MOTORS_MOT_3, -0.5f, 0.5f, 0, 0.45f, 0, 0, 3);add_motor_raw_6dof(AP_MOTORS_MOT_4, 0.5f, 0.5f, 0, 0.45f, 0, 0, 4);add_motor_raw_6dof(AP_MOTORS_MOT_5, 0, -1.0f, 0, 1.0f, 0, 0, 5);add_motor_raw_6dof(AP_MOTORS_MOT_6, -0.25f, 0, 0, 0, 0, 1.0f, 6);break;case SUB_FRAME_VECTORED_6DOF_90DEG:add_motor_raw_6dof(AP_MOTORS_MOT_1, 1.0f, 1.0f, 0, 1.0f, 0, 0, 1);add_motor_raw_6dof(AP_MOTORS_MOT_2, 0, 0, 1.0f, 0, 1.0f, 0, 2);add_motor_raw_6dof(AP_MOTORS_MOT_3, 1.0f, -1.0f, 0, 1.0f, 0, 0, 3);add_motor_raw_6dof(AP_MOTORS_MOT_4, 0, 0, 0, 0, 0, 1.0f, 4);add_motor_raw_6dof(AP_MOTORS_MOT_5, 0, 0, 0, 0, 0, 1.0f, 5);add_motor_raw_6dof(AP_MOTORS_MOT_6, -1.0f, 1.0f, 0, 1.0f, 0, 0, 6);add_motor_raw_6dof(AP_MOTORS_MOT_7, 0, 0, -1.0f, 0, 1.0f, 0, 7);add_motor_raw_6dof(AP_MOTORS_MOT_8, -1.0f, -1.0f, 0, 1.0f, 0, 0, 8);break;case SUB_FRAME_VECTORED_6DOF:add_motor_raw_6dof(AP_MOTORS_MOT_1, 0, 0, 1.0f, 0, -1.0f, 1.0f, 1);add_motor_raw_6dof(AP_MOTORS_MOT_2, 0, 0, -1.0f, 0, -1.0f, -1.0f, 2);add_motor_raw_6dof(AP_MOTORS_MOT_3, 0, 0, -1.0f, 0, 1.0f, 1.0f, 3);add_motor_raw_6dof(AP_MOTORS_MOT_4, 0, 0, 1.0f, 0, 1.0f, -1.0f, 4);add_motor_raw_6dof(AP_MOTORS_MOT_5, 1.0f, -1.0f, 0, -1.0f, 0, 0, 5);add_motor_raw_6dof(AP_MOTORS_MOT_6, -1.0f, -1.0f, 0, -1.0f, 0, 0, 6);add_motor_raw_6dof(AP_MOTORS_MOT_7, 1.0f, 1.0f, 0, -1.0f, 0, 0, 7);add_motor_raw_6dof(AP_MOTORS_MOT_8, -1.0f, 1.0f, 0, -1.0f, 0, 0, 8);break;case SUB_FRAME_VECTORED:add_motor_raw_6dof(AP_MOTORS_MOT_1, 0, 0, 1.0f, 0, -1.0f, 1.0f, 1);add_motor_raw_6dof(AP_MOTORS_MOT_2, 0, 0, -1.0f, 0, -1.0f, -1.0f, 2);add_motor_raw_6dof(AP_MOTORS_MOT_3, 0, 0, -1.0f, 0, 1.0f, 1.0f, 3);add_motor_raw_6dof(AP_MOTORS_MOT_4, 0, 0, 1.0f, 0, 1.0f, -1.0f, 4);add_motor_raw_6dof(AP_MOTORS_MOT_5, 1.0f, 0, 0, -1.0f, 0, 0, 5);add_motor_raw_6dof(AP_MOTORS_MOT_6, -1.0f, 0, 0, -1.0f, 0, 0, 6);break;case SUB_FRAME_CUSTOM:// Put your custom motor setup here//break;case SUB_FRAME_SIMPLEROV_3:case SUB_FRAME_SIMPLEROV_4:case SUB_FRAME_SIMPLEROV_5:default:add_motor_raw_6dof(AP_MOTORS_MOT_1, 0, 0, -1.0f, 0, 1.0f, 0, 1);add_motor_raw_6dof(AP_MOTORS_MOT_2, 0, 0, 1.0f, 0, 1.0f, 0, 2);add_motor_raw_6dof(AP_MOTORS_MOT_3, 0, 0, 0, -1.0f, 0, 0, 3);add_motor_raw_6dof(AP_MOTORS_MOT_4, 0, 0, 0, -1.0f, 0, 0, 4);add_motor_raw_6dof(AP_MOTORS_MOT_5, 0, 0, 0, 0, 0, 1.0f, 5);break;}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
这里找到了_roll_in,_pitch_in,_yaw_in姿态角速度PID运算后怎么传送,并进行电机分配转换成每个电机需要的PWM值的计算过程,这样整个过程基本就打通了。
我们重点关注这个值:thrust_rpyt_out[i]
6》》申请结构补偿thrust_compensation()
void AP_MotorsMatrix::thrust_compensation(void)
{if (_thrust_compensation_callback){_thrust_compensation_callback(_thrust_rpyt_out, AP_MOTORS_MAX_NUM_MOTORS); //最大8旋翼}
}thrust_compensation_fn_t _thrust_compensation_callback;
void set_thrust_compensation_callback(thrust_compensation_fn_t callback){_thrust_compensation_callback = callback;}7》》输出PWM到电机—output_to_motors
void AP_MotorsMatrix::output_to_motors()
{int8_t i;int16_t motor_out[AP_MOTORS_MAX_NUM_MOTORS]; // final pwm values sent to the motorswitch (_spool_mode){case SHUT_DOWN:{// sends minimum values out to the motors// set motor output based on thrust requestsfor (i=0; i<AP_MOTORS_MAX_NUM_MOTORS; i++) {if (motor_enabled[i]) {if (_disarm_disable_pwm && _disarm_safety_timer == 0 && !armed()) {motor_out[i] = 0;} else {motor_out[i] = get_pwm_output_min();}}}break;}case SPIN_WHEN_ARMED:// sends output to motors when armed but not flyingfor (i=0; i<AP_MOTORS_MAX_NUM_MOTORS; i++) {if (motor_enabled[i]) {motor_out[i] = calc_spin_up_to_pwm();}}break;case SPOOL_UP:case THROTTLE_UNLIMITED:case SPOOL_DOWN:// set motor output based on thrust requestsfor (i=0; i<AP_MOTORS_MAX_NUM_MOTORS; i++) {if (motor_enabled[i]) {motor_out[i] = calc_thrust_to_pwm(_thrust_rpyt_out[i]);}}break;}// send output to each motorfor (i=0; i<AP_MOTORS_MAX_NUM_MOTORS; i++){if (motor_enabled[i]){rc_write(i, motor_out[i]); //最终写入的值}}
}
最终写入的值: rc_write(i, motor_out[i]); //最终写入的值
void AP_Motors::rc_write(uint8_t chan, uint16_t pwm)
{if (_motor_map_mask & (1U<<chan)) {// we have a mapped motor number for this channelchan = _motor_map[chan];}if (_pwm_type == PWM_TYPE_ONESHOT125 && (_motor_fast_mask & (1U<<chan))) {// OneShot125 uses a PWM range from 125 to 250 usecpwm /= 8;/*OneShot125 ESCs can be confused by pulses below 125 or above250, making them fail the pulse type auto-detection. Thishappens at least with BLHeli*/if (pwm < 125){pwm = 125;} else if (pwm > 250){pwm = 250;}}hal.rcout->write(chan, pwm); //写入PWM到电机
}可以看到最后调用硬件抽象层hal.rcout->write
这里最后会调用AP_HAL_PX4里面的,为什么,可以看我的博客,apm怎么实现一个硬件抽象层支持不同的飞控板
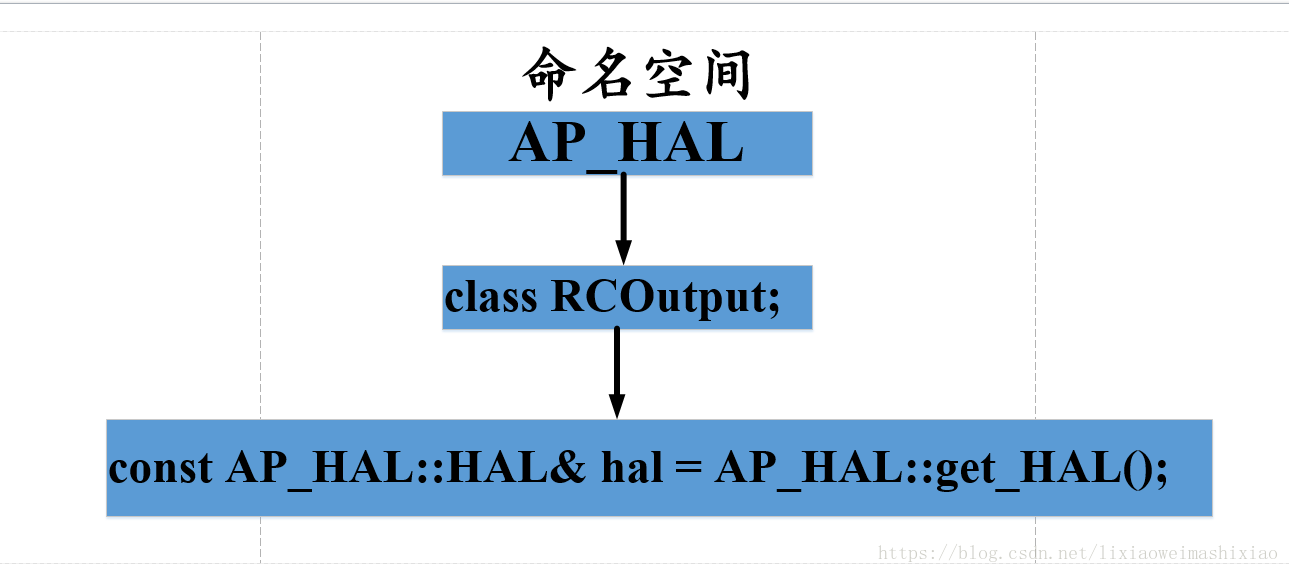
void PX4RCOutput::write(uint8_t ch, uint16_t period_us)
{if (ch >= PX4_NUM_OUTPUT_CHANNELS) {return;}if (!(_enabled_channels & (1U<<ch))) {// not enabledreturn;}if (ch >= _max_channel) {_max_channel = ch + 1;}if (_output_mode == MODE_PWM_BRUSHED16KHZ) {// map from the PWM range to 0 t0 100% duty cycle. For 16kHz// this ends up being 0 to 500 pulse width in units of// 125usec.const uint32_t period_max = 1000000UL/(16000/8);if (period_us <= _esc_pwm_min) {period_us = 0;} else if (period_us >= _esc_pwm_max) {period_us = period_max;} else {uint32_t pdiff = period_us - _esc_pwm_min;period_us = pdiff*period_max/(_esc_pwm_max - _esc_pwm_min);}}/*only mark an update is needed if there has been a change, or weare in oneshot mode. In oneshot mode we always need to send theoutput*/if (period_us != _period[ch] ||_output_mode == MODE_PWM_ONESHOT) {_period[ch] = period_us;_need_update = true;}
}如若内容造成侵权/违法违规/事实不符,请联系编程学习网邮箱:809451989@qq.com进行投诉反馈,一经查实,立即删除!
相关文章
- THINKPHP官方推荐第三方插件库
数据库 数据库迁移工具 topthink/think-migration —— https://github.com/top-think/think-migrationORM类库 topthink/think-orm —— https://github.com/top-think/think-ormOracle驱动 topthink/think-oracle—— https://github.com/top-think/think-oracleMongoDb扩展…...
2024/4/20 16:03:51 - 全切双眼皮疤痕了怎么办
...
2024/4/19 21:31:10 - Ubuntu16下用virtualbox 安装Windows虚拟机
平时要用Windows系统,但是现在工作都是在Linux下面开发,所以都没装Windows,之前用vm虚拟机比较麻烦, 所以就用virtualbox搞搞: 1、sed -i $adeb http://download.virtualbox.org/virtualbox/debian xenial contrib /etc/apt/sources.list 2、$ wget -q https://www.virtua…...
2024/5/3 7:29:09 - 割双眼皮后遗症VIP著奇致
...
2024/4/21 13:14:21 - 做双眼皮价钱VIP独奇致
...
2024/4/21 13:14:21 - 双眼皮哪家医院好吗
...
2024/4/21 13:14:19 - 做了双眼皮第一天好疼哦
...
2024/4/21 13:14:19 - 全切双眼皮长疤了怎么办
...
2024/4/21 13:14:18 - 一天之内学AngularJS--权威指南(未完)
英文原文:Ultimate guide to learning AngularJS in one day 一天之内学AngularJS–权威指南 AngularJs 是什么? Angular是基于javaScript语言构建的一个MVC/MVVM框架,对创建现代化单WEB应用(甚至是整个网站)至关重要…...
2024/5/3 6:20:42 - 双眼皮手术价格表多少钱答金宪俊
...
2024/4/21 13:14:16 - 惠州韩式双眼皮埋线v3可 瑞芙臣
...
2024/4/21 13:14:14 - 惠州割双眼皮和埋线v3当 瑞芙臣
...
2024/4/21 13:14:13 - 惠州埋线式双眼皮v3引领 瑞芙臣
...
2024/5/3 1:21:12 - 惠州埋线的双眼皮v3最佳 瑞芙臣
...
2024/5/3 2:01:15 - 第6篇:AngularJS路由去掉url里的#号刷新404($locationProvider.html5Mode(true)刷新404)
原文地址:http://blog.fens.me/angularjs-url/ 前言 天天都在用AngularJS,各类文档也都看过好几遍,但总是些编程上的事找不到优雅的解决办法。今天终于把AngularJS的项目访问路径URL里的#号去掉了,这个问题不见得有多难࿰…...
2024/5/3 2:02:10 - TinyUI组件开发示例
TinyUI实际上并不是一个具体的UI展现组件,它只是一个UI构建体系。它可以适应于各种HtmlCSSJS的体系架构中。 TinyUI主要解决下面的问题:UI中JS的引入与顺序,JS合并的问题 UI中css的引入与顺序,CSS合并的问题 UI中碰到性能问题时…...
2024/4/20 16:03:59 - ElementUI组件库的开发
(一)底层技术方法 第一阶段:SQL语句 第二阶段:PLSQL编程。 (二)后台技术方向 第一阶段:Java语言(必须) 第二阶段:Java技术(必须) 第三阶段:Java框架(主流) 主流框架: SSM:Spring SpringMVC M…...
2024/4/20 16:03:58 - 接睫毛之后能割双眼皮吗
...
2024/5/1 12:00:04 - 割了双眼皮之后能吃蓝莓吗
...
2024/5/3 10:12:21 - 埋线双眼皮术后几天愈合
...
2024/5/3 9:39:27
最新文章
- gateway中对返回的数据进行处理
gateway中对返回的数据进行处理 背景1.项目层次 背景 最近公司有个需求是对返回数据进行处理,比如进行数据脱敏。最后在gateway中进行处理。 1.项目层次 根据项目的结构,原本在菜单功能处有对于权限设计的url判断,所以在url后面加了一个正…...
2024/5/4 10:06:42 - 梯度消失和梯度爆炸的一些处理方法
在这里是记录一下梯度消失或梯度爆炸的一些处理技巧。全当学习总结了如有错误还请留言,在此感激不尽。 权重和梯度的更新公式如下: w w − η ⋅ ∇ w w w - \eta \cdot \nabla w ww−η⋅∇w 个人通俗的理解梯度消失就是网络模型在反向求导的时候出…...
2024/3/20 10:50:27 - GIS与数字孪生共舞,打造未来智慧场景
作为一名数字孪生资深用户,近日我深刻理解到GIS(地理信息系统)在构建数字孪生体中的关键作用。 数字孪生技术旨在构建现实世界的虚拟镜像,而GIS则是这一镜像中不可或缺的空间维度框架和导航灯塔。数字孪生的核心是通过数字化方式…...
2024/5/2 2:35:02 - Docke搭建Lidarr
Lidarr 是一个基于音乐的下载管理器,它可以监控多个 RSS 订阅源以查找用户指定类型的音乐并与支持的下载客户端协同工作。Lidarr 旨在自动化音乐下载过程,并整合到用户的音乐库中。它可以搜索歌曲,自动下载和整理音乐文件,更新元数…...
2024/5/2 9:37:05 - 【外汇早评】美通胀数据走低,美元调整
原标题:【外汇早评】美通胀数据走低,美元调整昨日美国方面公布了新一期的核心PCE物价指数数据,同比增长1.6%,低于前值和预期值的1.7%,距离美联储的通胀目标2%继续走低,通胀压力较低,且此前美国一季度GDP初值中的消费部分下滑明显,因此市场对美联储后续更可能降息的政策…...
2024/5/1 17:30:59 - 【原油贵金属周评】原油多头拥挤,价格调整
原标题:【原油贵金属周评】原油多头拥挤,价格调整本周国际劳动节,我们喜迎四天假期,但是整个金融市场确实流动性充沛,大事频发,各个商品波动剧烈。美国方面,在本周四凌晨公布5月份的利率决议和新闻发布会,维持联邦基金利率在2.25%-2.50%不变,符合市场预期。同时美联储…...
2024/5/2 16:16:39 - 【外汇周评】靓丽非农不及疲软通胀影响
原标题:【外汇周评】靓丽非农不及疲软通胀影响在刚结束的周五,美国方面公布了新一期的非农就业数据,大幅好于前值和预期,新增就业重新回到20万以上。具体数据: 美国4月非农就业人口变动 26.3万人,预期 19万人,前值 19.6万人。 美国4月失业率 3.6%,预期 3.8%,前值 3…...
2024/4/29 2:29:43 - 【原油贵金属早评】库存继续增加,油价收跌
原标题:【原油贵金属早评】库存继续增加,油价收跌周三清晨公布美国当周API原油库存数据,上周原油库存增加281万桶至4.692亿桶,增幅超过预期的74.4万桶。且有消息人士称,沙特阿美据悉将于6月向亚洲炼油厂额外出售更多原油,印度炼油商预计将每日获得至多20万桶的额外原油供…...
2024/5/3 23:10:03 - 【外汇早评】日本央行会议纪要不改日元强势
原标题:【外汇早评】日本央行会议纪要不改日元强势近两日日元大幅走强与近期市场风险情绪上升,避险资金回流日元有关,也与前一段时间的美日贸易谈判给日本缓冲期,日本方面对汇率问题也避免继续贬值有关。虽然今日早间日本央行公布的利率会议纪要仍然是支持宽松政策,但这符…...
2024/4/27 17:58:04 - 【原油贵金属早评】欧佩克稳定市场,填补伊朗问题的影响
原标题:【原油贵金属早评】欧佩克稳定市场,填补伊朗问题的影响近日伊朗局势升温,导致市场担忧影响原油供给,油价试图反弹。此时OPEC表态稳定市场。据消息人士透露,沙特6月石油出口料将低于700万桶/日,沙特已经收到石油消费国提出的6月份扩大出口的“适度要求”,沙特将满…...
2024/4/27 14:22:49 - 【外汇早评】美欲与伊朗重谈协议
原标题:【外汇早评】美欲与伊朗重谈协议美国对伊朗的制裁遭到伊朗的抗议,昨日伊朗方面提出将部分退出伊核协议。而此行为又遭到欧洲方面对伊朗的谴责和警告,伊朗外长昨日回应称,欧洲国家履行它们的义务,伊核协议就能保证存续。据传闻伊朗的导弹已经对准了以色列和美国的航…...
2024/4/28 1:28:33 - 【原油贵金属早评】波动率飙升,市场情绪动荡
原标题:【原油贵金属早评】波动率飙升,市场情绪动荡因中美贸易谈判不安情绪影响,金融市场各资产品种出现明显的波动。随着美国与中方开启第十一轮谈判之际,美国按照既定计划向中国2000亿商品征收25%的关税,市场情绪有所平复,已经开始接受这一事实。虽然波动率-恐慌指数VI…...
2024/4/30 9:43:09 - 【原油贵金属周评】伊朗局势升温,黄金多头跃跃欲试
原标题:【原油贵金属周评】伊朗局势升温,黄金多头跃跃欲试美国和伊朗的局势继续升温,市场风险情绪上升,避险黄金有向上突破阻力的迹象。原油方面稍显平稳,近期美国和OPEC加大供给及市场需求回落的影响,伊朗局势并未推升油价走强。近期中美贸易谈判摩擦再度升级,美国对中…...
2024/4/27 17:59:30 - 【原油贵金属早评】市场情绪继续恶化,黄金上破
原标题:【原油贵金属早评】市场情绪继续恶化,黄金上破周初中国针对于美国加征关税的进行的反制措施引发市场情绪的大幅波动,人民币汇率出现大幅的贬值动能,金融市场受到非常明显的冲击。尤其是波动率起来之后,对于股市的表现尤其不安。隔夜美国股市出现明显的下行走势,这…...
2024/5/2 15:04:34 - 【外汇早评】美伊僵持,风险情绪继续升温
原标题:【外汇早评】美伊僵持,风险情绪继续升温昨日沙特两艘油轮再次发生爆炸事件,导致波斯湾局势进一步恶化,市场担忧美伊可能会出现摩擦生火,避险品种获得支撑,黄金和日元大幅走强。美指受中美贸易问题影响而在低位震荡。继5月12日,四艘商船在阿联酋领海附近的阿曼湾、…...
2024/4/28 1:34:08 - 【原油贵金属早评】贸易冲突导致需求低迷,油价弱势
原标题:【原油贵金属早评】贸易冲突导致需求低迷,油价弱势近日虽然伊朗局势升温,中东地区几起油船被袭击事件影响,但油价并未走高,而是出于调整结构中。由于市场预期局势失控的可能性较低,而中美贸易问题导致的全球经济衰退风险更大,需求会持续低迷,因此油价调整压力较…...
2024/4/26 19:03:37 - 氧生福地 玩美北湖(上)——为时光守候两千年
原标题:氧生福地 玩美北湖(上)——为时光守候两千年一次说走就走的旅行,只有一张高铁票的距离~ 所以,湖南郴州,我来了~ 从广州南站出发,一个半小时就到达郴州西站了。在动车上,同时改票的南风兄和我居然被分到了一个车厢,所以一路非常愉快地聊了过来。 挺好,最起…...
2024/4/29 20:46:55 - 氧生福地 玩美北湖(中)——永春梯田里的美与鲜
原标题:氧生福地 玩美北湖(中)——永春梯田里的美与鲜一觉醒来,因为大家太爱“美”照,在柳毅山庄去寻找龙女而错过了早餐时间。近十点,向导坏坏还是带着饥肠辘辘的我们去吃郴州最富有盛名的“鱼头粉”。说这是“十二分推荐”,到郴州必吃的美食之一。 哇塞!那个味美香甜…...
2024/4/30 22:21:04 - 氧生福地 玩美北湖(下)——奔跑吧骚年!
原标题:氧生福地 玩美北湖(下)——奔跑吧骚年!让我们红尘做伴 活得潇潇洒洒 策马奔腾共享人世繁华 对酒当歌唱出心中喜悦 轰轰烈烈把握青春年华 让我们红尘做伴 活得潇潇洒洒 策马奔腾共享人世繁华 对酒当歌唱出心中喜悦 轰轰烈烈把握青春年华 啊……啊……啊 两…...
2024/5/1 4:32:01 - 扒开伪装医用面膜,翻六倍价格宰客,小姐姐注意了!
原标题:扒开伪装医用面膜,翻六倍价格宰客,小姐姐注意了!扒开伪装医用面膜,翻六倍价格宰客!当行业里的某一品项火爆了,就会有很多商家蹭热度,装逼忽悠,最近火爆朋友圈的医用面膜,被沾上了污点,到底怎么回事呢? “比普通面膜安全、效果好!痘痘、痘印、敏感肌都能用…...
2024/5/4 2:59:34 - 「发现」铁皮石斛仙草之神奇功效用于医用面膜
原标题:「发现」铁皮石斛仙草之神奇功效用于医用面膜丽彦妆铁皮石斛医用面膜|石斛多糖无菌修护补水贴19大优势: 1、铁皮石斛:自唐宋以来,一直被列为皇室贡品,铁皮石斛生于海拔1600米的悬崖峭壁之上,繁殖力差,产量极低,所以古代仅供皇室、贵族享用 2、铁皮石斛自古民间…...
2024/4/28 5:48:52 - 丽彦妆\医用面膜\冷敷贴轻奢医学护肤引导者
原标题:丽彦妆\医用面膜\冷敷贴轻奢医学护肤引导者【公司简介】 广州华彬企业隶属香港华彬集团有限公司,专注美业21年,其旗下品牌: 「圣茵美」私密荷尔蒙抗衰,产后修复 「圣仪轩」私密荷尔蒙抗衰,产后修复 「花茵莳」私密荷尔蒙抗衰,产后修复 「丽彦妆」专注医学护…...
2024/4/30 9:42:22 - 广州械字号面膜生产厂家OEM/ODM4项须知!
原标题:广州械字号面膜生产厂家OEM/ODM4项须知!广州械字号面膜生产厂家OEM/ODM流程及注意事项解读: 械字号医用面膜,其实在我国并没有严格的定义,通常我们说的医美面膜指的应该是一种「医用敷料」,也就是说,医用面膜其实算作「医疗器械」的一种,又称「医用冷敷贴」。 …...
2024/5/2 9:07:46 - 械字号医用眼膜缓解用眼过度到底有无作用?
原标题:械字号医用眼膜缓解用眼过度到底有无作用?医用眼膜/械字号眼膜/医用冷敷眼贴 凝胶层为亲水高分子材料,含70%以上的水分。体表皮肤温度传导到本产品的凝胶层,热量被凝胶内水分子吸收,通过水分的蒸发带走大量的热量,可迅速地降低体表皮肤局部温度,减轻局部皮肤的灼…...
2024/4/30 9:42:49 - 配置失败还原请勿关闭计算机,电脑开机屏幕上面显示,配置失败还原更改 请勿关闭计算机 开不了机 这个问题怎么办...
解析如下:1、长按电脑电源键直至关机,然后再按一次电源健重启电脑,按F8健进入安全模式2、安全模式下进入Windows系统桌面后,按住“winR”打开运行窗口,输入“services.msc”打开服务设置3、在服务界面,选中…...
2022/11/19 21:17:18 - 错误使用 reshape要执行 RESHAPE,请勿更改元素数目。
%读入6幅图像(每一幅图像的大小是564*564) f1 imread(WashingtonDC_Band1_564.tif); subplot(3,2,1),imshow(f1); f2 imread(WashingtonDC_Band2_564.tif); subplot(3,2,2),imshow(f2); f3 imread(WashingtonDC_Band3_564.tif); subplot(3,2,3),imsho…...
2022/11/19 21:17:16 - 配置 已完成 请勿关闭计算机,win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机...
win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机”问题的解决方法在win7系统关机时如果有升级系统的或者其他需要会直接进入一个 等待界面,在等待界面中我们需要等待操作结束才能关机,虽然这比较麻烦,但是对系统进行配置和升级…...
2022/11/19 21:17:15 - 台式电脑显示配置100%请勿关闭计算机,“准备配置windows 请勿关闭计算机”的解决方法...
有不少用户在重装Win7系统或更新系统后会遇到“准备配置windows,请勿关闭计算机”的提示,要过很久才能进入系统,有的用户甚至几个小时也无法进入,下面就教大家这个问题的解决方法。第一种方法:我们首先在左下角的“开始…...
2022/11/19 21:17:14 - win7 正在配置 请勿关闭计算机,怎么办Win7开机显示正在配置Windows Update请勿关机...
置信有很多用户都跟小编一样遇到过这样的问题,电脑时发现开机屏幕显现“正在配置Windows Update,请勿关机”(如下图所示),而且还需求等大约5分钟才干进入系统。这是怎样回事呢?一切都是正常操作的,为什么开时机呈现“正…...
2022/11/19 21:17:13 - 准备配置windows 请勿关闭计算机 蓝屏,Win7开机总是出现提示“配置Windows请勿关机”...
Win7系统开机启动时总是出现“配置Windows请勿关机”的提示,没过几秒后电脑自动重启,每次开机都这样无法进入系统,此时碰到这种现象的用户就可以使用以下5种方法解决问题。方法一:开机按下F8,在出现的Windows高级启动选…...
2022/11/19 21:17:12 - 准备windows请勿关闭计算机要多久,windows10系统提示正在准备windows请勿关闭计算机怎么办...
有不少windows10系统用户反映说碰到这样一个情况,就是电脑提示正在准备windows请勿关闭计算机,碰到这样的问题该怎么解决呢,现在小编就给大家分享一下windows10系统提示正在准备windows请勿关闭计算机的具体第一种方法:1、2、依次…...
2022/11/19 21:17:11 - 配置 已完成 请勿关闭计算机,win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机”的解决方法...
今天和大家分享一下win7系统重装了Win7旗舰版系统后,每次关机的时候桌面上都会显示一个“配置Windows Update的界面,提示请勿关闭计算机”,每次停留好几分钟才能正常关机,导致什么情况引起的呢?出现配置Windows Update…...
2022/11/19 21:17:10 - 电脑桌面一直是清理请关闭计算机,windows7一直卡在清理 请勿关闭计算机-win7清理请勿关机,win7配置更新35%不动...
只能是等着,别无他法。说是卡着如果你看硬盘灯应该在读写。如果从 Win 10 无法正常回滚,只能是考虑备份数据后重装系统了。解决来方案一:管理员运行cmd:net stop WuAuServcd %windir%ren SoftwareDistribution SDoldnet start WuA…...
2022/11/19 21:17:09 - 计算机配置更新不起,电脑提示“配置Windows Update请勿关闭计算机”怎么办?
原标题:电脑提示“配置Windows Update请勿关闭计算机”怎么办?win7系统中在开机与关闭的时候总是显示“配置windows update请勿关闭计算机”相信有不少朋友都曾遇到过一次两次还能忍但经常遇到就叫人感到心烦了遇到这种问题怎么办呢?一般的方…...
2022/11/19 21:17:08 - 计算机正在配置无法关机,关机提示 windows7 正在配置windows 请勿关闭计算机 ,然后等了一晚上也没有关掉。现在电脑无法正常关机...
关机提示 windows7 正在配置windows 请勿关闭计算机 ,然后等了一晚上也没有关掉。现在电脑无法正常关机以下文字资料是由(历史新知网www.lishixinzhi.com)小编为大家搜集整理后发布的内容,让我们赶快一起来看一下吧!关机提示 windows7 正在配…...
2022/11/19 21:17:05 - 钉钉提示请勿通过开发者调试模式_钉钉请勿通过开发者调试模式是真的吗好不好用...
钉钉请勿通过开发者调试模式是真的吗好不好用 更新时间:2020-04-20 22:24:19 浏览次数:729次 区域: 南阳 > 卧龙 列举网提醒您:为保障您的权益,请不要提前支付任何费用! 虚拟位置外设器!!轨迹模拟&虚拟位置外设神器 专业用于:钉钉,外勤365,红圈通,企业微信和…...
2022/11/19 21:17:05 - 配置失败还原请勿关闭计算机怎么办,win7系统出现“配置windows update失败 还原更改 请勿关闭计算机”,长时间没反应,无法进入系统的解决方案...
前几天班里有位学生电脑(windows 7系统)出问题了,具体表现是开机时一直停留在“配置windows update失败 还原更改 请勿关闭计算机”这个界面,长时间没反应,无法进入系统。这个问题原来帮其他同学也解决过,网上搜了不少资料&#x…...
2022/11/19 21:17:04 - 一个电脑无法关闭计算机你应该怎么办,电脑显示“清理请勿关闭计算机”怎么办?...
本文为你提供了3个有效解决电脑显示“清理请勿关闭计算机”问题的方法,并在最后教给你1种保护系统安全的好方法,一起来看看!电脑出现“清理请勿关闭计算机”在Windows 7(SP1)和Windows Server 2008 R2 SP1中,添加了1个新功能在“磁…...
2022/11/19 21:17:03 - 请勿关闭计算机还原更改要多久,电脑显示:配置windows更新失败,正在还原更改,请勿关闭计算机怎么办...
许多用户在长期不使用电脑的时候,开启电脑发现电脑显示:配置windows更新失败,正在还原更改,请勿关闭计算机。。.这要怎么办呢?下面小编就带着大家一起看看吧!如果能够正常进入系统,建议您暂时移…...
2022/11/19 21:17:02 - 还原更改请勿关闭计算机 要多久,配置windows update失败 还原更改 请勿关闭计算机,电脑开机后一直显示以...
配置windows update失败 还原更改 请勿关闭计算机,电脑开机后一直显示以以下文字资料是由(历史新知网www.lishixinzhi.com)小编为大家搜集整理后发布的内容,让我们赶快一起来看一下吧!配置windows update失败 还原更改 请勿关闭计算机&#x…...
2022/11/19 21:17:01 - 电脑配置中请勿关闭计算机怎么办,准备配置windows请勿关闭计算机一直显示怎么办【图解】...
不知道大家有没有遇到过这样的一个问题,就是我们的win7系统在关机的时候,总是喜欢显示“准备配置windows,请勿关机”这样的一个页面,没有什么大碍,但是如果一直等着的话就要两个小时甚至更久都关不了机,非常…...
2022/11/19 21:17:00 - 正在准备配置请勿关闭计算机,正在准备配置windows请勿关闭计算机时间长了解决教程...
当电脑出现正在准备配置windows请勿关闭计算机时,一般是您正对windows进行升级,但是这个要是长时间没有反应,我们不能再傻等下去了。可能是电脑出了别的问题了,来看看教程的说法。正在准备配置windows请勿关闭计算机时间长了方法一…...
2022/11/19 21:16:59 - 配置失败还原请勿关闭计算机,配置Windows Update失败,还原更改请勿关闭计算机...
我们使用电脑的过程中有时会遇到这种情况,当我们打开电脑之后,发现一直停留在一个界面:“配置Windows Update失败,还原更改请勿关闭计算机”,等了许久还是无法进入系统。如果我们遇到此类问题应该如何解决呢࿰…...
2022/11/19 21:16:58 - 如何在iPhone上关闭“请勿打扰”
Apple’s “Do Not Disturb While Driving” is a potentially lifesaving iPhone feature, but it doesn’t always turn on automatically at the appropriate time. For example, you might be a passenger in a moving car, but your iPhone may think you’re the one dri…...
2022/11/19 21:16:57