机器人工程本科专业课教学资源汇总(2018年暑假补充学习用)
手机应用软件:Robotics Engineering - Apps on Google Play
This Robotics Engineering App provides the basic know-how on the foundations of robotics: modelling, planning and control. The App takes the user through a step-by step design process in this rapidly advancing specialty area of robot design.This App provides the professional engineer and student with important and detailed methods and examples ...
----
GitHub+awesome
在github中搜索awesome+关键词,可以看到非常多有用的资源。
----
Python +Robotics
https://github.com/AtsushiSakai/PythonRobotics
----
编程基础部分:
Matlab:https://github.com/uhub/awesome-matlab
Python:https://github.com/vinta/awesome-python
C++:https://github.com/fffaraz/awesome-cpp
如,机器人学:https://github.com/kiloreux/awesome-robotics
This is a list of various books, courses and other resources for robotics. It's an attempt to gather useful material in one place for everybody who wants to learn more about the field.
Courses
- Artificial Intelligence for Robotics Udacity
- Robotics Nanodegree Udacity
- Autonomous Mobile Robots edX
- Underactuated Robotics edX
- Autonomous Mobile Robots edX
- Robot Mechanics and Control, Part I edX
- Robot Mechanics and Control, Part II edX
- Autonomous Navigation for Flying Robots edX
- Robotics Micromasters edX
- Robotics Specialization by GRASP Lab Coursera
- Control of Mobile Robots Coursera
- QUT Robot Academy QUT
- Robotic vision QUT
- Introduction to robotics MIT
- Robotics: Vision Intelligence and Machine Learning edX
- Applied robot design Stanford University
- Introduction to Robotics Stanford University
- Introduction to Mobile Robotics University of Freiburg
- Robotics edx
- Columbia Robotics edx
Books
- Probabilistic Robotics (Intelligent Robotics and Autonomous Agents series)
- Introduction to Autonomous Mobile Robots (Intelligent Robotics and Autonomous Agents series)
- Springer Handbook of Robotics
- Planning Algorithms
- A gentle introduction to ROS
- A Mathematical Introduction to Robotic Manipulation
- Learning Computing With Robots
- Robotics, Vision and Control: Fundamental Algorithms in MATLAB (Springer Tracts in Advanced Robotics)
- INTECH Books
- Introduction to Autonomous Robots
- Principles of Robot Motion: Theory, Algorithms, and Implementations
- Introduction to Modern Robotics: Mechanics, Planning, and Control [pdf]
- Learning ROS for Robotics Programming
- Mastering ROS for Robotics Programming
- Behavior Trees in Robotics and AI: An Introduction [pdf]
- Automated Planning and Acting [pdf]
Software and Libraries
Gazebo Robot Simulator
ROS The Robot Operating System (ROS) is a flexible framework for writing robot software. It is a collection of tools, libraries, and conventions that aim to simplify the task of creating complex and robust robot behavior across a wide variety of robotic platforms.
ROS2 ROS2 is a new version of ROS with radical design changes and improvement over older ROS version.
RobWork RobWork is a collection of C++ libraries for simulation and control of robot systems. RobWork is used for research and education as well as for practical robot applications.
MRPT Mobile Robot Programming Toolkit provides developers with portable and well-tested applications and libraries covering data structures and algorithms employed in common robotics research areas.
Robotics Library The Robotics Library (RL) is a self-contained C++ library for robot kinematics, motion planning and control. It covers mathematics, kinematics and dynamics, hardware abstraction, motion planning, collision detection, and visualization.
Simbad 2D/3D simulator in Java and Jython.
Morse General purpose indoor/outdoor 3D simulator.
Carmen CARMEN is an open-source collection of software for mobile robot control. CARMEN is modular software designed to provide basic navigation primitives including: base and sensor control, logging, obstacle avoidance, localization, path planning, and mapping.
Peekabot Peekabot is a real-time, networked 3D visualization tool for robotics, written in C++. Its purpose is to simplify the visualization needs faced by a roboticist daily.
YARP Yet Another Robot Platform.
V-REP Robot simulator, 3D, source available, Lua scripting, APIs for C/C++, Python, Java, Matlab, URBI, 2 physics engines, full kinematic solver.
Webots Webots is a development environment used to model, program and simulate mobile robots.
Drake A planning, control and analysis toolbox for nonlinear dynamical systems.
Neurorobotics Platform (NRP) An Internet-accessible simulation system that allows the simulation of robots controlled by spiking neural networks.
The Player Project Free Software tools for robot and sensor applications
Open AI's Roboschool Open-source software for robot simulation, integrated with OpenAI Gym.
ViSP Open-source visual servoing platform library, is able to compute control laws that can be applied to robotic systems.
ROS Behavior Trees Open-source library to create robot's behaviors in form of Behavior Trees running in ROS (Robot Operating System).
Papers
- Optimization Based Controller Design and Implementation for the Atlas Robot in the DARPA Robotics Challenge Finals
Conferences
- ACM/IEEE International Conference on Human Robot Interaction (HRI)
- CISM IFToMM Symposium on Robot Design, Dynamics and Control (RoManSy)
- IEEE Conference on Decision and Controls (CDC)
- IEEE International Conference on Rehabilitation Robotics (ICORR)
- IEEE International Conference on Robotics and Automation (ICRA)
- IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
- IEEE-RAS International Conference on Humanoid Robots (Humanoids)
- International Symposium of Robotic Research (ISRR)
- International Symposium of Experimental Robotics (ISER)
- Robotica
- Robotics: Science and Systems Conference (RSS)
- The International Workshop on the Algorithmic Foundations of Robotics (WAFR)
Journals
- Autonomous Robots
- Bioinspiration & Biomimetics
- Frontiers in Robotics and AI
- IEEE Robotics & Automation Magazine
- IEEE Transactions on Haptics
- IEEE Transactions on Robotics
- IEEE/ASME Transactions on Mechatronics
- International Journal of Social Robotics
- Journal of Field Robotics
- Journal of Intelligent & Robotic Systems
- Mechatronics
- Robotics and Computer-Integrated Manufacturing
- Robotics and Autonomous Systems
- The International Journal of Robotics Research
Competitions
- ICRA Robot Challenges
- RobotChallenge
- DARPA Robotics Challenge
- European Robotics Challenges
- First Robotics Competition
- VEX Robotics Competition
- RoboCup
- Eurobot International Students Robotics Contest
- RoboMasters
- RoboSoft, Grand Challenge
- Intelligent Ground Vehicle Competition
- Robotex The biggest robotics festival in Europe
Companies
- Boston Dynamics robotics R&D company, creator of the state of the art Atlas and Spot robots
- iRobot manufacturer of the famous Roomba robotic vacuum cleaner
- PAL Robotics
- Aldebaran Robotics creator of the NAO robot
- ABB Robotics the largest manufacturer of industrial robots
- KUKA Robotics major manufacturer of industrial robots targeted at factory automation
- FANUC industrial robots manufacturer with the biggest install base
- Rethink Robotics creator of the collaborative robot Baxter
- DJI industry leader in drones for both commerical and industrial needs.
- The construct sim A cloud based tool for building modern, future-proof robot simulations.
- Fetch Robotics A robotics startup in San Jose, CA building the future of e-commerce fulfillment and R&D robots.
- Festo Robotics Festo is known for making moving robots that move like animals such as the sea gull like SmartBird, jellyfish, butterflies and kangaroos.
Misc
- IEEE Spectrum Robotics robotics section of the IEEE Spectrum magazine
- MIT Technology Review Robotics robotics section of the MIT Technology Review magazine
- reddit robotics subreddit
- RosCON conference (video talks included)
- Carnegie Mellon Robotics Academy
- Let's Make Robots
- How do I learn Robotics?
- Free NXT Lego MindStorms NXT-G code tutorials
- StackExachange Robotics community
- 47 Programmable robotic kits
Related awesome lists
- Awesome Artificial Intelligence
- Awesome Computer Vision
- Awesome Machine Learning
- Awesome Deep Learning
- Awesome Deep Vision
- Awesome Reinforcement Learning
- Awesome Robotics
- Awesome Robotics Libraries
Awesome links, software libraries, papers, and other intersting links that are useful for robots.
Relevant Awesome Lists
- Kiloreaux/awesome-robotics - Learn about Robotics.
- Robotics Libraries - Another list of awesome robotics libraries.
- Computer Vision
- Deep Learning - Neural networks.
- TensorFlow - Library for machine intelligence.
- Papers - The most cited deep learning papers.
- Deep Vision - Deep learning for computer vision
- Data Visualization - See what your robot is doing with any programming language.
Simulators
- V-REP - Create, Simulate, any Robot.
- Microsoft Airsim - Open source simulator based on Unreal Engine for autonomous vehicles from Microsoft AI & Research.
- Bullet Physics SDK - Real-time collision detection and multi-physics simulation for VR, games, visual effects, robotics, machine learning etc. Also see pybullet.
Visualization, Video, Display, and Rendering
- Pangolin - A lightweight portable rapid development library for managing OpenGL display / interaction and abstracting video input.
- PlotJuggler - Quickly plot and re-plot data on the fly! Includes optional ROS integration.
- Data Visualization - A list of awesome data visualization tools.
Machine Learning
TensorFlow related
- Keras - Deep Learning library for Python. Convnets, recurrent neural networks, and more. Runs on TensorFlow or Theano.
- keras-contrib - Keras community contributions.
- TensorFlow - An open-source software library for Machine Intelligence.
- recurrentshop - Framework for building complex recurrent neural networks with Keras.
- tensorpack - Neural Network Toolbox on TensorFlow.
- tensorlayer - Deep Learning and Reinforcement Learning Library for Researchers and Engineers.
- TensorFlow-Examples - TensorFlow Tutorial and Examples for beginners.
- hyperas - Keras + Hyperopt: A very simple wrapper for convenient hyperparameter optimization.
- elephas - Distributed Deep learning with Keras & Spark
- PipelineAI - End-to-End ML and AI Platform for Real-time Spark and Tensorflow Data Pipelines.
- sonnet - Google Deepmind APIs on top of TensorFlow.
- visipedia/tfrecords - Demonstrates the use of TensorFlow's TFRecord data format.
Image Segmentation
- tf-image-segmentation - Image Segmentation framework based on Tensorflow and TF-Slim library.
- Keras-FCN
Logging and Messaging
- spdlog - Super fast C++ logging library.
- lcm - Lightweight Communications and Marshalling, message passing and data marshalling for real-time systems where high-bandwidth and low latency are critical.
Tracking
- simtrack - A simulation-based framework for tracking.
- ar_track_alvar - AR tag tracking library for ROS.
- artoolkit5 - Augmented Reality Toolkit, which has excellent AR tag tracking software.
Robot Operating System (ROS)
- ROS - Main ROS website.
- ros2/design - Design documentation for ROS 2.0 effort.
Kinematics, Dynamics, Constrained Optimization
- jrl-umi3218/Tasks - Tasks is library for real time control of robots and kinematic trees using constrained optimization.
- jrl-umi3218/RBDyn - RBDyn provides a set of classes and functions to model the dynamics of rigid body systems.
- ceres-solver - Solve Non-linear Least Squares problems with bounds constraints and general unconstrained optimization problems. Used in production at Google since 2010.
- orocos_kinematics_dynamics - Orocos Kinematics and Dynamics C++ library.
- flexible-collsion-library - Performs three types of proximity queries on a pair of geometric models composed of triangles, integrated with ROS.
- robot_calibration - generic robot kinematics calibration for ROS
Calibration
- handeye-calib-camodocal - generic robot hand-eye calibration.
- robot_calibration - generic robot kinematics calibration for ROS
- kalibr - camera and imu calibration for ROS
Reinforcement Learning
- TensorForce - A TensorFlow library for applied reinforcement learning
- gqcnn - Grasp Quality Convolutional Neural Networks (GQ-CNNs) for grasp planning using training datasets from the Dexterity Network (Dex-Net)
- Guided Policy Search - Guided policy search (gps) algorithm and LQG-based trajectory optimization, meant to help others understand, reuse, and build upon existing work.
Drivers for Sensors, Devices and Arms
- libfreenect2 - Open source drivers for the Kinect for Windows v2 and Xbox One devices.
- iai_kinect2 - Tools for using the Kinect One (Kinect v2) in ROS.
- grl - Generic Robotics Library: Cross platform drivers for Kuka iiwa and Atracsys FusionTrack with optional v-rep and ros drivers. Also has cross platform Hand Eye Calibration and Tool Tip Calibration.
Datasets
- pascal voc 2012 - The classic reference image segmentation dataset.
- openimages - Huge imagenet style dataset by Google.
- COCO - Objects with segmentation, keypoints, and links to many other external datasets.
- cocostuff - COCO additional full scene segmentation including backgrounds and annotator.
- Google Brain Robot Data - Robotics datasets including grasping, pushing, and pouring.
- Materials in Context - Materials Dataset with real world images in 23 categories.
- Dex-Net 2.0 - 6.7 million pairs of synthetic point clouds and grasps with robustness labels.
Dataset Collection
- cocostuff - COCO additional full scene segmentation including backgrounds and annotator.
Linear Algebra & Geometry
- Eigen - Eigen is a C++ template library for linear algebra: matrices, vectors, numerical solvers, and related algorithms.
- Boost.QVM - Quaternions, Vectors, Matrices library for Boost.
- Boost.Geometry - Boost.Geometry contains instantiable geometry classes, but library users can also use their own.
- SpaceVecAlg - Implementation of spatial vector algebra for 3D geometry with the Eigen3 linear algebra library.
- Sophus - C++ implementation of Lie Groups which are for 3D Geometry, using Eigen.
Point Clouds
- libpointmatcher - An "Iterative Closest Point" library robotics and 2-D/3-D mapping.
- Point Cloud Library (pcl) - The Point Cloud Library (PCL) is a standalone, large scale, open project for 2D/3D image and point cloud processing.
Simultaneous Localization and Mapping (SLAM)
- ElasticFusion - Real-time dense visual SLAM system.
- co-fusion - Real-time Segmentation, Tracking and Fusion of Multiple Objects. Extends ElasticFusion.
- Google Cartographer - Cartographer is a system that provides real-time simultaneous localization and mapping (SLAM) in 2D and 3D across multiple platforms and sensor configurations.
- OctoMap - An Efficient Probabilistic 3D Mapping Framework Based on Octrees. Contains the main OctoMap library, the viewer octovis, and dynamicEDT3D.
- ORB_SLAM2 - Real-Time SLAM for Monocular, Stereo and RGB-D Cameras, with Loop Detection and Relocalization Capabilities.
The list of vision-based SLAM / Visual Odometry open source projects, libraries, dataset, tools, and studies
Index
- Libraries
- Dataset
- Tools
- Projects
- Learn
- Miscellaneous
Libraries
Basic vision and trasformation libraries
- OpenCV
- Eigen
- Sophus
- ROS
- PointCloud
Thread-safe queue libraries
- concurrentqueue
- Intel® TBB
- Facebook folly PC
Loop detection
- dorian3d
Graph Optimization
- ceres-solver
- g2o
- gtasm
- Vertigo
Map library
- ETHZ ASL/Grip Map
- OmniMapper
- OctoMap
Dataset
Dataset for benchmark/test/experiment/evalutation
- TUM Universtiy
- KTTI Vision benchmark
- UNI-Freiburg
Tools
- rgbd-dataset tool from TUM
- evo - evaluation tool for different trajectory formats
Projects
RGB (Monocular):
- PTAM
[1] Georg Klein and David Murray, "Parallel Tracking and Mapping for Small AR Workspaces", Proc. ISMAR 2007 [2] Georg Klein and David Murray, "Improving the Agility of Keyframe-based SLAM", Proc. ECCV 2008
- DSO. Available on ROS
Direct Sparse Odometry, J. Engel, V. Koltun, D. Cremers, In arXiv:1607.02565, 2016 A Photometrically Calibrated Benchmark For Monocular Visual Odometry, J. Engel, V. Usenko, D. Cremers, In arXiv:1607.02555, 2016
- LSD-SLAM. Available on ROS
LSD-SLAM: Large-Scale Direct Monocular SLAM, J. Engel, T. Schöps, D. Cremers, ECCV '14 Semi-Dense Visual Odometry for a Monocular Camera, J. Engel, J. Sturm, D. Cremers, ICCV '13
- ORB-SLAM. Available on ROS
[1] Raúl Mur-Artal, J. M. M. Montiel and Juan D. Tardós. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE > Transactions on Robotics, vol. 31, no. 5, pp. 1147-1163, 2015. (2015 IEEE Transactions on Robotics Best Paper Award). PDF. [2] Dorian Gálvez-López and Juan D. Tardós. Bags of Binary Words for Fast Place Recognition in Image Sequences. IEEE > Transactions on Robotics, vol. 28, no. 5, pp. 1188-1197, 2012. PDF.
- Nister's Five Point Algorithm for Essential Matrix estimation, and FAST features, with a KLT tracker
D. Nister, “An efficient solution to the five-point relative pose problem,” Pattern Analysis and Machine Intelligence, IEEE Transactions on, vol. 26, no. 6, pp. 756–770, 2004.
- SVO-SLAM. Available on ROS
Christian Forster, Matia Pizzoli, Davide Scaramuzza, "SVO: Fast Semi-direct Monocular Visual Odometry," IEEE International Conference on Robotics and Automation, 2014.
RGB and Depth (Called RGBD):
- OpenCV RGBD-Odometry (Visual Odometry based RGB-D images)
Real-Time Visual Odometry from Dense RGB-D Images, F. Steinbucker, J. Strum, D. Cremers, ICCV, 2011
- Dense Visual SLAM for RGB-D Cameras. Available on ROS
[1]Dense Visual SLAM for RGB-D Cameras (C. Kerl, J. Sturm, D. Cremers), In Proc. of the Int. Conf. on Intelligent Robot Systems (IROS), 2013. [2]Robust Odometry Estimation for RGB-D Cameras (C. Kerl, J. Sturm, D. Cremers), In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2013 [3]Real-Time Visual Odometry from Dense RGB-D Images (F. Steinbruecker, J. Sturm, D. Cremers), In Workshop on Live Dense Reconstruction with Moving Cameras at the Intl. Conf. on Computer Vision (ICCV), 2011.
- RTAB MAP - Real-Time Appearance-Based Mapping. Available on ROS
Online Global Loop Closure Detection for Large-Scale Multi-Session Graph-Based SLAM, 2014 Appearance-Based Loop Closure Detection for Online Large-Scale and Long-Term Operation, 2013
- ORB2-SLAM. Available on ROS
[1] Raúl Mur-Artal, J. M. M. Montiel and Juan D. Tardós. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE > Transactions on Robotics, vol. 31, no. 5, pp. 1147-1163, 2015. (2015 IEEE Transactions on Robotics Best Paper Award). [2] Dorian Gálvez-López and Juan D. Tardós. Bags of Binary Words for Fast Place Recognition in Image Sequences. IEEE Transactions on Robotics, vol. 28, no. 5, pp. 1188-1197, 2012.
- InfiniTAM∞ v2
Kahler, O. and Prisacariu, V.~A. and Ren, C.~Y. and Sun, X. and Torr, P.~H.~S and Murray, D.~W. Very High Frame Rate Volumetric Integration of Depth Images on Mobile Device. IEEE Transactions on Visualization and Computer Graphics (Proceedings International Symposium on Mixed and Augmented Reality 2015
- Kintinuous
Real-time Large Scale Dense RGB-D SLAM with Volumetric Fusion, T. Whelan, M. Kaess, H. Johannsson, M.F. Fallon, J. J. Leonard and J.B. McDonald, IJRR '14
- ElasticFusion
[1] ElasticFusion: Real-Time Dense SLAM and Light Source Estimation, T. Whelan, R. F. Salas-Moreno, B. Glocker, A. J. Davison and S. Leutenegger, IJRR '16 [2] ElasticFusion: Dense SLAM Without A Pose Graph, T. Whelan, S. Leutenegger, R. F. Salas-Moreno, B. Glocker and A. J. Davison, RSS '15
- Co-Fusion
Martin Rünz and Lourdes Agapito. Co-Fusion: Real-time Segmentation, Tracking and Fusion of Multiple Objects. 2017 IEEE International Conference on Robotics and Automation (ICRA)
RGBD and LIDAR:
- Google's cartographer. Available on ROS
----
awesome-deep-vision-web-demo
A curated list of awesome deep vision web demo
Contributing
Please feel free to pull requests to add papers.
Vision Demo List
Hand-written Digit Recognition
- https://tensorflow-mnist.herokuapp.com/
- https://erkaman.github.io/regl-cnn/src/demo.html
- https://transcranial.github.io/keras-js/#/mnist-cnn
Image Segmentation
- CRF+RNN (ICCV 2015) http://www.robots.ox.ac.uk/~szheng/crfasrnndemo
Image Classification
- VGG-16 https://deeplearning4j.org/demo-classifier-vgg16
- Illustration2vec http://demo.illustration2vec.net/
- Leiden Univ. http://goliath.liacs.nl/
- Clarifai https://www.clarifai.com/demo
- Google Colud Vision API http://vision-explorer.reactive.ai/#/?_k=aodf68
- IBMWatson Vision API https://visual-recognition-demo.mybluemix.net/
- Karpathy: MNIST ConvNet http://cs.stanford.edu/people/karpathy/convnetjs/demo/mnist.html
- Karpathy: CIFAR10 ConvNet http://cs.stanford.edu/people/karpathy/convnetjs/demo/cifar10.html
- keras-js: IMAGENET 50-layer Residual Network https://transcranial.github.io/keras-js/#/resnet50
- keras-js: IMAGENET Inception-v3 https://transcranial.github.io/keras-js/#/inception-v3
- keras-js: IMAGENET SqueezeNet v1.1 https://transcranial.github.io/keras-js/#/squeezenet-v1.1
- Teachable Machine: 3 Classes with online video https://teachablemachine.withgoogle.com/
Object Detection
- http://silverpond.com.au/object-detector
Text Detection
- Single Shot Text Detector with Regional Attention (ICCV 2017) http://128.227.246.42:5555/
Age Estimation
- https://how-old.net/
AutoEncoder
- VAE : MNIST Geneartation http://www.dpkingma.com/sgvb_mnist_demo/demo.html
- VAE : keras-js MNIST https://transcranial.github.io/keras-js/#/mnist-vae
- VAE : Gray Face Generation http://vdumoulin.github.io/morphing_faces/online_demo.html
- Karpathy: Denoising AutoEncoder http://cs.stanford.edu/people/karpathy/convnetjs/demo/autoencoder.html
GAN
- GAN : 1D Gaussian Distribution Fitting http://cs.stanford.edu/people/karpathy/gan/
- DCGAN : Asian Color Face Generation http://carpedm20.github.io/faces/
- DCGAN : Character Generation http://mattya.github.io/chainer-DCGAN/
- ACGAN : keras-js MNIST https://transcranial.github.io/keras-js/#/mnist-acgan
- Girls Chacacter Generation : http://make.girls.moe/#/
- GAN-playground : https://reiinakano.github.io/gan-playground/
Style Transfer
- On/Off-line Style Transfer, Deep Dream https://deepdreamgenerator.com/gallery
- Offline Style Transfer, http://demos.algorithmia.com/deep-style/
Image Translation
- pix2pix https://affinelayer.com/pixsrv/index.html
- pix2pix (human face) http://fotogenerator.npocloud.nl/
Colorization
- sketch to color image https://paintschainer.preferred.tech/
- draw sketch and colorize it https://sketch.pixiv.net/draw
- deepcolor http://color.kvfrans.com/
- gray photo to color photo http://demos.algorithmia.com/colorize-photos/
Image Captioning
- MS https://www.captionbot.ai/
Visual Q&A
- http://vqa.daylen.com/
- https://cloudcv.org/vqa/
Google's AI Experiment
- Quick Draw https://quickdraw.withgoogle.com/#
- Auto Draw http://www.autodraw.com/
- Sketch RNN (Draw together with a neural network) https://aiexperiments.withgoogle.com/sketch-rnn-demo
Gaze Manipulation
- http://163.172.78.19/
Super-Resolution
- http://waifu2x.udp.jp/
Saliency Map
- SALICON (ICCV 2015) http://salicon.net/demo/#
Font Generation
- http://fontjoy.com/
Image to ASCII Code
- https://art.pixlab.io/
Image Completion
- http://jhyu.me/posts/2018/01/20/generative-inpainting.html
OCR (Optical Character Recognition)
- http://tesseract.projectnaptha.com/
Human Pose Estimation
- https://control.kylemcdonald.net/posenet/
Others
Neural-Net Demo
- tensorflow play ground http://playground.tensorflow.org/
- karpathy: toy 2d classification http://cs.stanford.edu/people/karpathy/convnetjs/demo/classify2d.html
Text To Speech
- Wavenet https://deepmind.com/blog/wavenet-generative-model-raw-audio/
Speech Noise Reduction
- SEGAN ('17.03) http://veu.talp.cat/segan/
Singing Generation
- Neural Singing ('17.04) http://www.dtic.upf.edu/~mblaauw/IS2017_NPSS/
Sound Synthesizer
- Neural Synthesizer https://aiexperiments.withgoogle.com/sound-maker/view/
----
PythonRobotics
Python codes for robotics algorithm.
Table of Contents
- What is this?
- Requirements
- How to use
- Localization
- Extended Kalman Filter localization
- Unscented Kalman Filter localization
- Particle filter localization
- Histogram filter localization
- Mapping
- Gaussian grid map
- Ray casting grid map
- k-means object clustering
- Object shape recognition using circle fitting
- SLAM
- Iterative Closest Point (ICP) Matching
- EKF SLAM
- FastSLAM 1.0
- FastSLAM 2.0
- Graph based SLAM
- Path Planning
- Dynamic Window Approach
- Grid based search
- Dijkstra algorithm
- A* algorithm
- Potential Field algorithm
- Model Predictive Trajectory Generator
- Path optimization sample
- Lookup table generation sample
- State Lattice Planning
- Uniform polar sampling
- Biased polar sampling
- Lane sampling
- Probabilistic Road-Map (PRM) planning
- Voronoi Road-Map planning
- Rapidly-Exploring Random Trees (RRT)
- Basic RRT
- RRT*
- RRT with dubins path
- RRT* with dubins path
- RRT* with reeds-sheep path
- Informed RRT*
- Batch Informed RRT*
- Closed Loop RRT*
- LQR-RRT*
- Cubic spline planning
- B-Spline planning
- Eta^3 Spline path planning
- Bezier path planning
- Quintic polynomials planning
- Dubins path planning
- Reeds Shepp planning
- LQR based path planning
- Optimal Trajectory in a Frenet Frame
- Path tracking
- Pure pursuit tracking
- Stanley control
- Rear wheel feedback control
- Linear–quadratic regulator (LQR) steering control
- Linear–quadratic regulator (LQR) speed and steering control
- Model predictive speed and steering control
- License
- Contribution
- Support
- Authors
What is this?
This is a Python code collection of robotics algorithms, especially for autonomous navigation.
Features:
-
Widely used and practical algorithms are selected.
-
Minimum dependency.
-
Easy to read for understanding each algorithm's basic idea.
Requirements
-
Python 3.6.x
-
numpy
-
scipy
-
matplotlib
-
pandas
-
cvxpy
How to use
-
Install the required libraries.
-
Clone this repo.
-
Execute python script in each directory.
-
Add star to this repo if you like it
 .
.
Localization
Extended Kalman Filter localization

This is a sensor fusion localization with Extended Kalman Filter(EKF).
The blue line is true trajectory, the black line is dead reckoning trajectory,
the green point is positioning observation (ex. GPS), and the red line is estimated trajectory with EKF.
The red ellipse is estimated covariance ellipse with EKF.
Ref:
- PROBABILISTIC ROBOTICS
Unscented Kalman Filter localization

This is a sensor fusion localization with Unscented Kalman Filter(UKF).
The lines and points are same meaning of the EKF simulation.
Ref:
- Discriminatively Trained Unscented Kalman Filter for Mobile Robot Localization
Particle filter localization

This is a sensor fusion localization with Particle Filter(PF).
The blue line is true trajectory, the black line is dead reckoning trajectory,
and the red line is estimated trajectory with PF.
It is assumed that the robot can measure a distance from landmarks (RFID).
This measurements are used for PF localization.
Ref:
- PROBABILISTIC ROBOTICS
Histogram filter localization

This is a 2D localization example with Histogram filter.
The red cross is true position, black points are RFID positions.
The blue grid shows a position probability of histogram filter.
In this simulation, x,y are unknown, yaw is known.
The filter integrates speed input and range observations from RFID for localization.
Initial position is not needed.
Ref:
- PROBABILISTIC ROBOTICS
Mapping
Gaussian grid map
This is a 2D Gaussian grid mapping example.

Ray casting grid map
This is a 2D ray casting grid mapping example.

k-means object clustering
This is a 2D object clustering with k-means algorithm.

Object shape recognition using circle fitting
This is an object shape recognition using circle fitting.

The blue circle is the true object shape.
The red crosses are observations from a ranging sensor.
The red circle is the estimated object shape using circle fitting.
SLAM
Simultaneous Localization and Mapping(SLAM) examples
Iterative Closest Point (ICP) Matching
This is a 2D ICP matching example with singular value decomposition.
It can calculate a rotation matrix and a translation vector between points to points.

Ref:
- Introduction to Mobile Robotics: Iterative Closest Point Algorithm
EKF SLAM
This is an Extended Kalman Filter based SLAM example.
The blue line is ground truth, the black line is dead reckoning, the red line is the estimated trajectory with EKF SLAM.
The green crosses are estimated landmarks.

Ref:
- PROBABILISTIC ROBOTICS
FastSLAM 1.0
This is a feature based SLAM example using FastSLAM 1.0.
The blue line is ground truth, the black line is dead reckoning, the red line is the estimated trajectory with FastSLAM.
The red points are particles of FastSLAM.
Black points are landmarks, blue crosses are estimated landmark positions by FastSLAM.

Ref:
-
PROBABILISTIC ROBOTICS
-
SLAM simulations by Tim Bailey
FastSLAM 2.0
This is a feature based SLAM example using FastSLAM 2.0.
The animation has the same meanings as one of FastSLAM 1.0.

Ref:
-
PROBABILISTIC ROBOTICS
-
SLAM simulations by Tim Bailey
Graph based SLAM
This is a graph based SLAM example.
The blue line is ground truth.
The black line is dead reckoning.
The red line is the estimated trajectory with Graph based SLAM.
The black stars are landmarks for graph edge generation.

Ref:
- A Tutorial on Graph-Based SLAM
Path Planning
Dynamic Window Approach
This is a 2D navigation sample code with Dynamic Window Approach.
- The Dynamic Window Approach to Collision Avoidance

Grid based search
Dijkstra algorithm
This is a 2D grid based shortest path planning with Dijkstra's algorithm.

In the animation, cyan points are searched nodes.
A* algorithm
This is a 2D grid based shortest path planning with A star algorithm.

In the animation, cyan points are searched nodes.
Its heuristic is 2D Euclid distance.
Potential Field algorithm
This is a 2D grid based path planning with Potential Field algorithm.

In the animation, the blue heat map shows potential value on each grid.
Ref:
- Robotic Motion Planning:Potential Functions
Model Predictive Trajectory Generator
This is a path optimization sample on model predictive trajectory generator.
This algorithm is used for state lattice planner.
Path optimization sample

Lookup table generation sample

Ref:
- Optimal rough terrain trajectory generation for wheeled mobile robots
State Lattice Planning
This script is a path planning code with state lattice planning.
This code uses the model predictive trajectory generator to solve boundary problem.
Ref:
-
Optimal rough terrain trajectory generation for wheeled mobile robots
-
State Space Sampling of Feasible Motions for High-Performance Mobile Robot Navigation in Complex Environments
Uniform polar sampling

Biased polar sampling

Lane sampling

Probabilistic Road-Map (PRM) planning

This PRM planner uses Dijkstra method for graph search.
In the animation, blue points are sampled points,
Cyan crosses means searched points with Dijkstra method,
The red line is the final path of PRM.
Ref:
- Probabilistic roadmap - Wikipedia
Voronoi Road-Map planning

This Voronoi road-map planner uses Dijkstra method for graph search.
In the animation, blue points are Voronoi points,
Cyan crosses mean searched points with Dijkstra method,
The red line is the final path of Vornoi Road-Map.
Ref:
- Robotic Motion Planning
Rapidly-Exploring Random Trees (RRT)
Basic RRT

This is a simple path planning code with Rapidly-Exploring Random Trees (RRT)
Black circles are obstacles, green line is a searched tree, red crosses are start and goal positions.
RRT*

This is a path planning code with RRT*
Black circles are obstacles, green line is a searched tree, red crosses are start and goal positions.
Ref:
-
Incremental Sampling-based Algorithms for Optimal Motion Planning
-
Sampling-based Algorithms for Optimal Motion Planning
RRT with dubins path

Path planning for a car robot with RRT and dubins path planner.
RRT* with dubins path

Path planning for a car robot with RRT* and dubins path planner.
RRT* with reeds-sheep path
 )
)
Path planning for a car robot with RRT* and reeds sheep path planner.
Informed RRT*
 )
)
This is a path planning code with Informed RRT*.
The cyan ellipse is the heuristic sampling domain of Informed RRT*.
Ref:
- Informed RRT*: Optimal Sampling-based Path Planning Focused via Direct Sampling of an Admissible Ellipsoidal Heuristic
Batch Informed RRT*
 )
)
This is a path planning code with Batch Informed RRT*.
Ref:
- Batch Informed Trees (BIT*): Sampling-based Optimal Planning via the Heuristically Guided Search of Implicit Random Geometric Graphs
Closed Loop RRT*
A vehicle model based path planning with closed loop RRT*.

In this code, pure-pursuit algorithm is used for steering control,
PID is used for speed control.
Ref:
-
Motion Planning in Complex Environments using Closed-loop Prediction
-
Real-time Motion Planning with Applications to Autonomous Urban Driving
-
[1601.06326] Sampling-based Algorithms for Optimal Motion Planning Using Closed-loop Prediction
LQR-RRT*
This is a path planning simulation with LQR-RRT*.
A double integrator motion model is used for LQR local planner.

Ref:
-
LQR-RRT*: Optimal Sampling-Based Motion Planning with Automatically Derived Extension Heuristics
-
MahanFathi/LQR-RRTstar: LQR-RRT* method is used for random motion planning of a simple pendulum in its phase plot
Cubic spline planning
A sample code for cubic path planning.
This code generates a curvature continuous path based on x-y waypoints with cubic spline.
Heading angle of each point can be also calculated analytically.



B-Spline planning

This is a path planning with B-Spline curse.
If you input waypoints, it generates a smooth path with B-Spline curve.
The final course should be on the first and last waypoints.
Ref:
- B-spline - Wikipedia
Eta^3 Spline path planning

This is a path planning with Eta^3 spline.
Ref:
- \eta^3-Splines for the Smooth Path Generation of Wheeled Mobile Robots
Bezier path planning
A sample code of Bezier path planning.
It is based on 4 control points Beier path.

If you change the offset distance from start and end point,
You can get different Beizer course:

Ref:
- Continuous Curvature Path Generation Based on Bezier Curves for Autonomous Vehicles
Quintic polynomials planning
Motion planning with quintic polynomials.

It can calculate 2D path, velocity, and acceleration profile based on quintic polynomials.
Ref:
- Local Path Planning And Motion Control For Agv In Positioning
Dubins path planning
A sample code for Dubins path planning.

Ref:
- Dubins path - Wikipedia
Reeds Shepp planning
A sample code with Reeds Shepp path planning.

Ref:
-
15.3.2 Reeds-Shepp Curves
-
optimal paths for a car that goes both forwards and backwards
-
ghliu/pyReedsShepp: Implementation of Reeds Shepp curve.
LQR based path planning
A sample code using LQR based path planning for double integrator model.

Optimal Trajectory in a Frenet Frame

This is optimal trajectory generation in a Frenet Frame.
The cyan line is the target course and black crosses are obstacles.
The red line is predicted path.
Ref:
-
Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame
-
Optimal trajectory generation for dynamic street scenarios in a Frenet Frame
Path tracking
Pure pursuit tracking
Path tracking simulation with pure pursuit steering control and PID speed control.

The red line is a target course, the green cross means the target point for pure pursuit control, the blue line is the tracking.
Ref:
- A Survey of Motion Planning and Control Techniques for Self-driving Urban Vehicles
Stanley control
Path tracking simulation with Stanley steering control and PID speed control.

Ref:
-
Stanley: The robot that won the DARPA grand challenge
-
Automatic Steering Methods for Autonomous Automobile Path Tracking
Rear wheel feedback control
Path tracking simulation with rear wheel feedback steering control and PID speed control.

Ref:
- A Survey of Motion Planning and Control Techniques for Self-driving Urban Vehicles
Linear–quadratic regulator (LQR) steering control
Path tracking simulation with LQR steering control and PID speed control.

Ref:
- ApolloAuto/apollo: An open autonomous driving platform
Linear–quadratic regulator (LQR) speed and steering control
Path tracking simulation with LQR speed and steering control.

Ref:
- Towards fully autonomous driving: Systems and algorithms - IEEE Conference Publication
Model predictive speed and steering control
Path tracking simulation with iterative linear model predictive speed and steering control.

Ref:
- notebook
License
MIT
Contribution
A small PR like bug fix is welcome.
If your PR is merged multiple times, I will add your account to the author list.
Support
You can support this project financially via Patreon.
You can get e-mail technical supports about the codes if you are being a patron.
- Atsushi Sakai is creating Open Source Software | Patreon
PayPal donation is also welcome.
Authors
-
Atsushi Sakai (@Atsushi_twi)
-
Daniel Ingram
-
Joe Dinius
-
Karan Chawla
-
Antonin RAFFIN
-
Alexis Paques
----
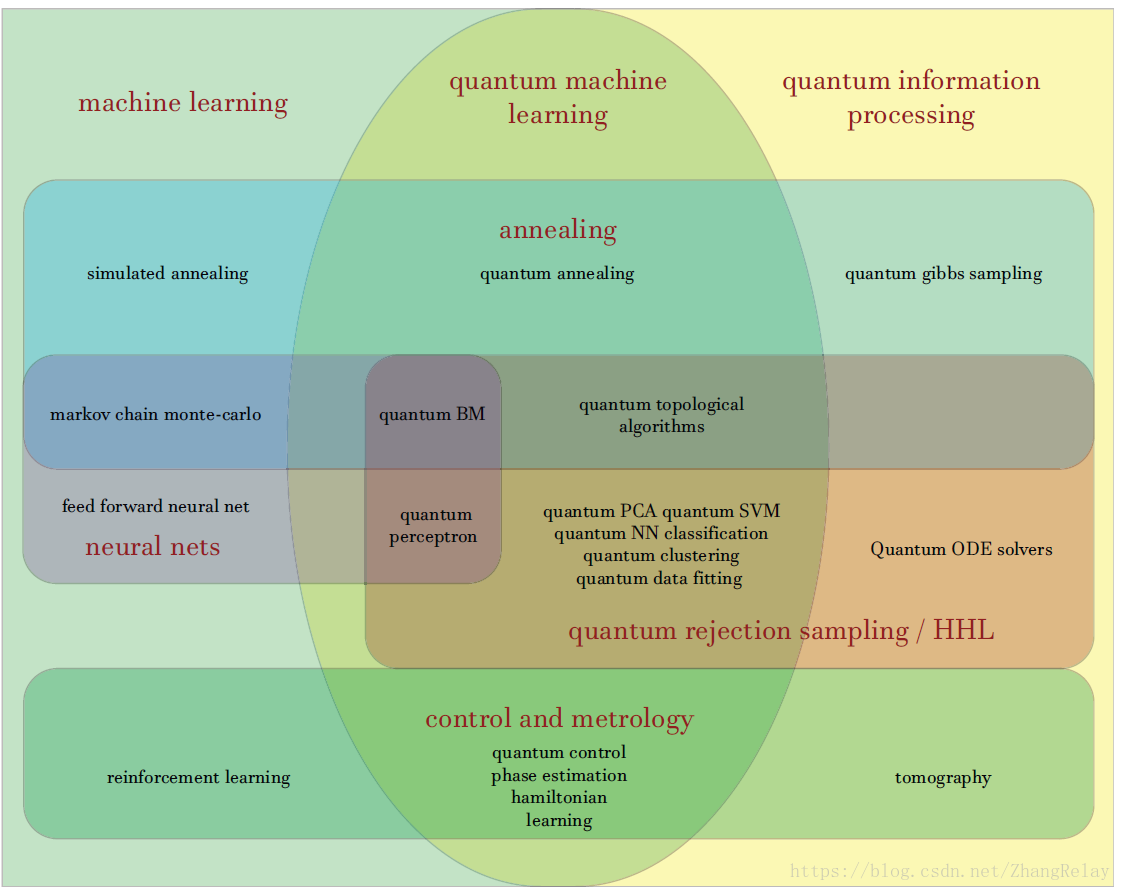
量子机器学习-量子机器人
The computing field must have a change from classical to quantum.
计算领域必须从经典变为量子。
https://github.com/krishnakumarsekar/awesome-quantum-machine-learning
----
Fall 2017 - Vision Algorithms for Mobile Robotics
UZH-BMINF020 / ETH-151-0632-00L
The course is open to all the students of the University of Zurich and ETH. Students should register through their own institutions.
Goal of the Course
For a robot to be autonomous, it has to perceive and understand the world around it. This course introduces you to the key computer vision algorithms used in mobile robotics, such as feature extraction, multiple view geometry, dense reconstruction, tracking, image retrieval, event-based vision, and visual-inertial odometry (the algorithms behind Google Tango, Apple ARKit, Google ARCore, Microsoft Hololens, Magic Leap and the Mars rovers). Basics knowledge of algebra, geomertry, and matrix calculus are required.
Time and location
Lectures: every Thursday from 10:15 to 12:00 in ETH LFW C5, Universitätstrasse 2, 8092 Zurich.
Exercises: Thursdays, roughly every two weeks, from 13:15 to 15:00 in ETH HG E 1.1, Rämistrasse 101, 8092 Zurich.
Please check out the course agenda below for the exact schedule.
Course Program, Slides, and Add-on Material
Official course program (please notice that this is a tentative schedule and that the effective content of the lecture can change from week to week.
| Date | Lecture and Exercise Title | Slides and add-on material |
| 21.09.2017 | Lecture 01 - Introduction to Computer Vision and Visual Odometry | Slides (last update 21.09.2017) Visual odometry tutorial Part I Visual odometry tutorial Part II SLAM survey paper |
| 28.09.2017 | Lecture 02 - Image Formation 1: perspective projection and camera models | Slides (last update 27.09.2017) |
| 05.10.2017 | Lecture 03 - Image Formation 2: camera calibration algorithms Exercise 01 - Augmented reality wireframe cube | Slides (last update 04.10.2017) Additional reading on P3P and PnP problems Exercise 01 (last update 04.10.2017) Solutions (last update 12.10.2017) Introduction to Matlab |
| 12.10.2017 | Lecture 04 - Filtering & Edge detection Exercise 02 - PnP problem | Slides (last update 12.10.2017) Exercise 02 (last update 12.10.2017) Solutions (last update 16.10.2017) |
| 19.10.2017 | Lecture 05 - Point Feature Detectors, Part 1 Exercise 03 - Harris detector + descriptor + matching | Slides (last update 19.10.2017) Exercise 03 (last update 17.10.2017) Solutions (last update 24.10.2017) |
| 26.10.2017 | Lecture 06 - Point Feature Detectors, Part 2 | Slides (last update 26.10.2017) Additional reading on feature detection |
| 02.11.2017 | Lecture 07 - Multiple-view geometry 1 Exercise 04 - Stereo vision: rectification, epipolar matching, disparity, triangulation | Slides (last update 01.11.2017) Additional reading on stereo image rectification Exercise 04(last update 31.10.2017) Solutions (last update 31.10.2017) |
| 09.11.2017 | Lecture 08 - Multiple-view geometry 2 Exercise 05 - Two-view Geometry | Slides (last update 9.11.2017) Additional reading on 2-view geometry Exercise 05 (last update 8.11.2017) Solutions (last update 14.11.2017) |
| 16.11.2017 | Lecture 09 - Multiple-view geometry 3 Exercise 06 - P3P algorithm and RANSAC | Slides (last update 22.11.2017) Additional reading on open-source VO algorithms Exercise 06 (last update 16.11.2017) Solutions (last update 20.11.2017) |
| 23.11.2017 | Lecture 10 - Dense 3D Reconstruction Exercise session: Intermediate VO Integration | Slides (last update 29.11.2017) Additional reading on dense 3D reconstruction Find the VO project downloads below |
| 30.11.2017 | Lecture 11 - Optical Flow and Tracking (Lucas-Kanade) Exercise 07 - Lucas-Kanade tracker | Slides (last update 29.11.2017) Additional reading on Lucas-Kanade Exercise 07 (last update 30.11.2017) Solutions (last update 06.12.2017) |
| 07.12.2017 | Lecture 12 - Place recognition Exercise session: Deep Learning Tutorial | Slides (last update 07.12.2017) Additional reading on Bag-of-Words-based place recognition Optional exercise on place recognition(last update 06.12.2017) Deep Learning Slides(last update 07.12.2017) |
| 14.12.2017 | Lecture 13 - Visual inertial fusion Exercise 08 - Bundle Adjustment | Slides (last update 14.12.2017) Advanced Slides for intrerested reader Additional reading on visual-inertial fusion Exercise 08 (last update 13.12.2017) Solutions (last update 17.12.2017) |
| 21.12.2017 | Lecture 14 - Event based vision + Scaramuzza's lab visit with live demos Exercise session: final VO integration | Slides (last update 19.12.2017) Additional reading on event-based vision |
Oral Exam Questions (last udpate 21.12.2017)
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. This documentcontains a "non exhaustive" list of possible application questions and an "exhaustive" list of all the topics that you should learn about the course, which will be subject of discussion in the theoretical part.
Grading and optional Mini Project (last udpate 22.11.2017)
The final grade is based on the oral exam (30 minutes, exam date for UZH: Jan. 18; exam date for ETH students will be between January 22 and February 9 2018, dates communicated by ETH). Mini projects are optional and up to the students. Depending on the result of the mini project (see Project Specification in the table below), the student will be rewarded with a grade increase of up to 0.5 on the final grade. However, notice that the mini project can be quite time consuming. Mini project specification and files can be found in the table below. The deadline for the project is Sunday, 07.01.2018, 23:59:59, and it can be submitted via e-mail to the assistants (detailed instructions in specification).
| Description | Link(size) |
| Project Specification | vo_project_statement.pdf (600 kB, last updated 22.11.2017) |
| FAQ | Frequently Asked Questions |
| Parking garage dataset (easy) | parking.zip (208.3 MB) |
| KITTI 00 dataset (hard) | kitti00.zip (2.3 GB) |
| Malaga 07 dataset (hard) | malaga-urban-dataset-extract-07.zip (2.4 GB) |
| Matlab script to load datasets | main.m (2.6 kB) |
Recommended Textbooks
(All available in the NEBIS catalogue)
- Robotics, Vision and Control: Fundamental Algorithms, 2nd Ed., by Peter Corke 2017. The PDF of the book can be freely downloaded (only with ETH VPN) from the author's webpage.
- Computer Vision: Algorithms and Applications, by Richard Szeliski, Springer, 2010. The PDF of the book can be freely downloaded from the author's webpage.
- An Invitation to 3D Vision, by Y. Ma, S. Soatto, J. Kosecka, S.S. Sastry.
- Multiple view Geometry, by R. Hartley and A. Zisserman.
- Chapter 4 of "Autonomous Mobile Robots", by R. Siegwart, I.R. Nourbakhsh, D. Scaramuzza. PDF
Spring 2015 - Autonomous Mobile Robots
The course is currently open to all the students of the University of Zurich and ETH (Bachelor's and Master's). Lectures take place every Monday (from 16.02.2014 to 30.05.2014) from 14:15 to 16:00 in the ETH main building (HG) in room E 1.2. Exercise take place almost every second Tuesday from 10:15 to 12:00 in the ETH main building in room G1.
The course is also given as an MOOC (Massive Open Online Course) under edX.
Course Program
Official course webpage.
Recommended Textbook
R. Siegwart, I.R. Nourbakhsh, and D. Scaramuzza
Introduction to autonomous mobile robots 2nd Edition (hardback)
A Bradford Book, The MIT Press, ISBN: 978-0-262-01535-6, February, 2011
The book can be bought during the first lecture or on Amazon.
MIT WebsiteBook WebsiteBuy
Archived slides, videos, and lecture recordings
Since 2007, Prof. Davide Scaramuzza has been teaching this course at ETH Zurich and since 2012 the course has been shared also with University of Zurich. The lectures are based on Prof. Scaramuzza's book Autonomous Mobile Robots, MIT Press. Recordings of previous lectures (until 2012) can be watched or downloaded, only by ETH students, here.
You can download all the lecture slides and videos of past lectures (updated in 2010) from the following links:
- Power Point slides: AMR_lecture_slides.zip
- Videos Part 1: AMR_lecture_videos_1.zip
- Videos Part 2: AMR_lecture_videos_2.zip
- Videos Part 3: AMR_lecture_videos_3.zip
- Videos Part 4: AMR_lecture_videos_4.zip
- Videos Part 5: AMR_lecture_videos_5.zip
----
----
如若内容造成侵权/违法违规/事实不符,请联系编程学习网邮箱:809451989@qq.com进行投诉反馈,一经查实,立即删除!
相关文章
- NIPS2019 | 2019NIPS论文 | NeurIPS2019最新更新论文~持续更新| NIPS2019百度云下载
论文下载百度云链接:链接:https://pan.baidu.com/s/100OAXTIOTPoMjbi-dwOcxA 提取码:请关注【计算机视觉联盟】微信公众号,回复:NIPS2019 今天更新到2019年9月6号 目录 今天更新到2019年9月4号 Understanding the…...
2024/4/26 22:54:45 - 云计算的技术路线探讨
引言当前的“云计算”一词已经被神话,似乎快成了放之四海皆准的时髦真理,就好比当初言必称“希腊”一般,表面光芒四射,但实际上却无比教条、且越来越令人生厌。作为“云计算”的一个普通开发者和推广者,很有必要通过亲身实践,以正视听,希望能让后来者(云计算系统的开发…...
2024/4/27 18:59:54 - camvid数据集介绍_语义分割的数据集
背景语义分割指的是把图像中的每个像素都划分到某一个类别上。实现算法上,有传统时代的grab cut、ML时代的TextonForest、DL时代的FCN 、SegNet 、Dilated Convolutions 、DeepLab (v1 & v2)、RefineNet 、PSPNet 、Large Kernel Matters 、DeepLab v3等。当然了…...
2024/4/27 14:07:53 - [语义分割]训练deeplabv3(一):建立自己的数据集
[deeplabv3]:https://github.com/tensorflow/models/tree/master/research/deeplab [labelme]:https://github.com/wkentaro/labelme 简介 本博客主要介绍了,deeplabv3训练前的自己数据集准备工作: 即将用labelme标记的自己的语义分割数据集转化为deeplabv3训练支持的tfreco…...
2024/4/27 19:39:11 - 解决“OSError: [WinError 126] 找不到指定的模块”的问题 Win10
针对情景: Win10下运行py工程报错,最后一行为“OSError: [WinError 126] 找不到指定的模块”倒数第二端为Shapely相关函数的语句(如下图)PS:其他情景用该方法未必有效 问题原因: 由上图可见,倒…...
2024/4/27 19:25:12 - ImportError: DLL load failed: 页面文件太小,无法完成操作。
python代码训练神经网络时,报错:“ImportError: DLL load failed: 页面文件太小,无法完成操作。” 出现这个问题可能有两种情况。 ①不止在运行一个项目,另一个项目的python程序也在运行,关掉就可以了。 ②windows操作…...
2024/4/20 20:44:45 - ImportError: Could not find the DLL(s) 'msvcp140_1.dll'. 跑tensorflow时报错
解决思路是缺失dll文件,安装这个文件就可以。试过去网站下载dll,还是不行。有人说用腾讯电脑管家的dll文件修复功能,也不行。最后在这个网站找到了。 https://support.microsoft.com/zh-cn/help/2977003/the-latest-supported-visual-c-down…...
2024/4/20 20:44:43 - 列表取片操作易错点(list indices must be integers or slices, not tuple原因及解决方法)
list indices must be integers or slices, not tuple原因及解决方法 场景: 在对列表进行取数据时报错,报错代码: TypeError: list indices must be integers or slices, not tuple翻译: 列表索引必须是整数(取某一个…...
2024/4/20 20:44:42 - 【终极!!!】cannot connect to X server, couldnt connect to display
目前遇到了两种报这个错的情况: 情况一:本地在外网,通过SSH登录到内网服务器。运行代码, 报错: (1)cannot connect to X server (2)_tkinter.TclError: couldnt conn…...
2024/4/24 12:26:21 - VGG训练报错:Errors may have originated from an input operation.
利用自己做的数据集训练VGG时,出现报错信息: Errors may have originated from an input operation. Input Source operations connected to node conv0/Conv1/Conv2D: IteratorGetNext (defined at train_resnet.py:95) Input Source operations connected to node conv0/Co…...
2024/4/20 20:44:41 - 报错:module ffmpeg has no attribute input 解决方法
1、检查是否安装正确的包 kkroening/ffmpeg-python: Python bindings for FFmpeg - with complex filtering support (github.com) 这是官网,该包正确名称为ffmpeg-python,易与ffmpeg、python-ffmpeg混淆;使用以下命令进行重新安装…...
2024/4/23 0:51:03 - CodeMonkey流水账:字符串格式化or不格式化
需要记录/打印的文本内容中有格式化字符串 比如记录一句SQL里面有类似: someField like ‘ABC%’。 writeLog("someField like ABC%");下面的函数就会报错。 public static void writeLog(LogType type, String format, Object... args) throws TNUExce…...
2024/4/20 20:44:38 - tensorflowGPU版出现Failed to load the native TensorFlow问题
只要按 https://stackoverflow.com/questions/43942185/failed-to-load-the-native-tensorflow-runtime-python-3-5-2中所描述的安装一遍就可以解决了...
2024/4/20 20:44:37 - GitHub 上有哪些适合新手跟进的优质项目?
点击上方“迈微电子研发社”,选择“星标★”公众号 重磅干货,第一时间送达 看过我文章的社友们都知道,你再不使用GitHub,都不敢跟别人说自己是CS专业的。所以,它的重要性也就不再多言了,今天就分享给大家如…...
2024/4/20 20:44:36 - vue在npm run dev运行项目时出现npm ERR! code ELIFECYCLE问题解决方案
今天准备开始一个新项目,于是用vue-cli创建了一个项目,可是当npm run dev时报错: 解决方法: 第一步:npm uninstall webpack-dev-server 第二步:npm install webpack-dev-server2.9.1 第三步:npm…...
2024/4/20 20:44:35 - 拜见罗宾逊一家
Meet The Robinsons 我没有选那个 因为那个会让我起疙瘩 Then I didnt choose that one because it was gonna give me pimples, 于是我挑了另外一个比较恐怖的 so I choosed another scary one 因为根据我多年参加 万圣节前夕的经验 because, for all those years that I w…...
2024/4/20 20:44:34 - 普通话水平测试脸型软件,你明明长得挺漂亮,为什么拍照总是不上镜?
被叫天仙这么多年,完全担得起这个称号!但是作为一个明星,出道这么多年怎么可能没有一两张黑图呢(没错,黑照都是产于自己的微博)!这蜜汁角度。。。这魔幻打光。。。还有这堪比座机的画质。。。其实不只是天仙,Miya身边很…...
2024/4/20 20:44:33 - 爱情指数测试脸型软件,叶罗丽测试:选一个完美的脸型,测你想成为谁的初恋女友?我是D...
选一个完美的脸型A、B、C、D、答案揭晓:(此测试仅供娱乐!所有图片来源于网络)A、你想成为校草的初恋女友。你是一个注重细节的女孩。你所做的每件事都要考虑周全,决不轻率行事。你又聪明又漂亮。你是学校里最有名的花。每个男孩心里都喜欢你。…...
2024/4/21 1:23:36 - UI测试脸型软件,App脸型美化剖析|UI-影视-其他|观点|freshoil - 原创文章 - 站酷 (ZCOOL)...
本文基于市面上多款App的美颜效果,做了一个对比分析,整理出一个可以指导美颜调教的参考规范。研究的几个要点如下:1.通过对 某陌、某音、某Y、某他相机、某天P图的效果对比分析2.本次只针对默认效果做对比(某Y无默认则选择自然)3.统一使用前置…...
2024/4/21 22:09:51 - OutputCache 配置用cookie
2019独角兽企业重金招聘Python工程师标准>>> <%@ OutputCache CacheProfile="CacheConfig"%> CacheProfile在web.config里指定 system.web配置节下 duration,varyByParam必须的,varyByParam根据urlget参数缓存,多个参数间用,分隔 varyByCus…...
2024/4/21 1:23:34
最新文章
- Android 12 Starting window的添加与移除
添加: 04-13 16:29:55.931 2944 7259 D jinyanmeistart: at com.android.server.wm.StartingSurfaceController.createSplashScreenStartingSurface(StartingSurfaceController.java:87) 04-13 16:29:55.931 2944 7259 D jinyanmeistart: at com.android.server.wm.…...
2024/4/27 20:19:02 - 梯度消失和梯度爆炸的一些处理方法
在这里是记录一下梯度消失或梯度爆炸的一些处理技巧。全当学习总结了如有错误还请留言,在此感激不尽。 权重和梯度的更新公式如下: w w − η ⋅ ∇ w w w - \eta \cdot \nabla w ww−η⋅∇w 个人通俗的理解梯度消失就是网络模型在反向求导的时候出…...
2024/3/20 10:50:27 - 面试经典算法系列之双指针1 -- 合并两个有序数组
面试经典算法题1 – 合并两个有序数组 LeetCode.88 公众号:阿Q技术站 问题描述 给你两个按 非递减顺序 排列的整数数组 nums1 和 nums2,另有两个整数 m 和 n ,分别表示 nums1 和 nums2 中的元素数目。 请你 合并 nums2 到 nums1 中&#…...
2024/4/24 21:21:10 - 【ARM 嵌入式 C 文件操作系列 20 -- 文件删除函数 remove 详细介绍】
请阅读【嵌入式开发学习必备专栏 】 文章目录 文件删除函数 remove 文件删除函数 remove 在 C 语言中, 可以使用 remove 函数来删除一个文件,但在删除之前 可能想确认该文件是否存在。 可以使用 stat 函数来检查文件是否存在。 以下是如何实现这个功能…...
2024/4/25 7:29:23 - 【外汇早评】美通胀数据走低,美元调整
原标题:【外汇早评】美通胀数据走低,美元调整昨日美国方面公布了新一期的核心PCE物价指数数据,同比增长1.6%,低于前值和预期值的1.7%,距离美联储的通胀目标2%继续走低,通胀压力较低,且此前美国一季度GDP初值中的消费部分下滑明显,因此市场对美联储后续更可能降息的政策…...
2024/4/26 18:09:39 - 【原油贵金属周评】原油多头拥挤,价格调整
原标题:【原油贵金属周评】原油多头拥挤,价格调整本周国际劳动节,我们喜迎四天假期,但是整个金融市场确实流动性充沛,大事频发,各个商品波动剧烈。美国方面,在本周四凌晨公布5月份的利率决议和新闻发布会,维持联邦基金利率在2.25%-2.50%不变,符合市场预期。同时美联储…...
2024/4/26 20:12:18 - 【外汇周评】靓丽非农不及疲软通胀影响
原标题:【外汇周评】靓丽非农不及疲软通胀影响在刚结束的周五,美国方面公布了新一期的非农就业数据,大幅好于前值和预期,新增就业重新回到20万以上。具体数据: 美国4月非农就业人口变动 26.3万人,预期 19万人,前值 19.6万人。 美国4月失业率 3.6%,预期 3.8%,前值 3…...
2024/4/26 23:05:52 - 【原油贵金属早评】库存继续增加,油价收跌
原标题:【原油贵金属早评】库存继续增加,油价收跌周三清晨公布美国当周API原油库存数据,上周原油库存增加281万桶至4.692亿桶,增幅超过预期的74.4万桶。且有消息人士称,沙特阿美据悉将于6月向亚洲炼油厂额外出售更多原油,印度炼油商预计将每日获得至多20万桶的额外原油供…...
2024/4/27 4:00:35 - 【外汇早评】日本央行会议纪要不改日元强势
原标题:【外汇早评】日本央行会议纪要不改日元强势近两日日元大幅走强与近期市场风险情绪上升,避险资金回流日元有关,也与前一段时间的美日贸易谈判给日本缓冲期,日本方面对汇率问题也避免继续贬值有关。虽然今日早间日本央行公布的利率会议纪要仍然是支持宽松政策,但这符…...
2024/4/27 17:58:04 - 【原油贵金属早评】欧佩克稳定市场,填补伊朗问题的影响
原标题:【原油贵金属早评】欧佩克稳定市场,填补伊朗问题的影响近日伊朗局势升温,导致市场担忧影响原油供给,油价试图反弹。此时OPEC表态稳定市场。据消息人士透露,沙特6月石油出口料将低于700万桶/日,沙特已经收到石油消费国提出的6月份扩大出口的“适度要求”,沙特将满…...
2024/4/27 14:22:49 - 【外汇早评】美欲与伊朗重谈协议
原标题:【外汇早评】美欲与伊朗重谈协议美国对伊朗的制裁遭到伊朗的抗议,昨日伊朗方面提出将部分退出伊核协议。而此行为又遭到欧洲方面对伊朗的谴责和警告,伊朗外长昨日回应称,欧洲国家履行它们的义务,伊核协议就能保证存续。据传闻伊朗的导弹已经对准了以色列和美国的航…...
2024/4/26 21:56:58 - 【原油贵金属早评】波动率飙升,市场情绪动荡
原标题:【原油贵金属早评】波动率飙升,市场情绪动荡因中美贸易谈判不安情绪影响,金融市场各资产品种出现明显的波动。随着美国与中方开启第十一轮谈判之际,美国按照既定计划向中国2000亿商品征收25%的关税,市场情绪有所平复,已经开始接受这一事实。虽然波动率-恐慌指数VI…...
2024/4/27 9:01:45 - 【原油贵金属周评】伊朗局势升温,黄金多头跃跃欲试
原标题:【原油贵金属周评】伊朗局势升温,黄金多头跃跃欲试美国和伊朗的局势继续升温,市场风险情绪上升,避险黄金有向上突破阻力的迹象。原油方面稍显平稳,近期美国和OPEC加大供给及市场需求回落的影响,伊朗局势并未推升油价走强。近期中美贸易谈判摩擦再度升级,美国对中…...
2024/4/27 17:59:30 - 【原油贵金属早评】市场情绪继续恶化,黄金上破
原标题:【原油贵金属早评】市场情绪继续恶化,黄金上破周初中国针对于美国加征关税的进行的反制措施引发市场情绪的大幅波动,人民币汇率出现大幅的贬值动能,金融市场受到非常明显的冲击。尤其是波动率起来之后,对于股市的表现尤其不安。隔夜美国股市出现明显的下行走势,这…...
2024/4/25 18:39:16 - 【外汇早评】美伊僵持,风险情绪继续升温
原标题:【外汇早评】美伊僵持,风险情绪继续升温昨日沙特两艘油轮再次发生爆炸事件,导致波斯湾局势进一步恶化,市场担忧美伊可能会出现摩擦生火,避险品种获得支撑,黄金和日元大幅走强。美指受中美贸易问题影响而在低位震荡。继5月12日,四艘商船在阿联酋领海附近的阿曼湾、…...
2024/4/25 18:39:16 - 【原油贵金属早评】贸易冲突导致需求低迷,油价弱势
原标题:【原油贵金属早评】贸易冲突导致需求低迷,油价弱势近日虽然伊朗局势升温,中东地区几起油船被袭击事件影响,但油价并未走高,而是出于调整结构中。由于市场预期局势失控的可能性较低,而中美贸易问题导致的全球经济衰退风险更大,需求会持续低迷,因此油价调整压力较…...
2024/4/26 19:03:37 - 氧生福地 玩美北湖(上)——为时光守候两千年
原标题:氧生福地 玩美北湖(上)——为时光守候两千年一次说走就走的旅行,只有一张高铁票的距离~ 所以,湖南郴州,我来了~ 从广州南站出发,一个半小时就到达郴州西站了。在动车上,同时改票的南风兄和我居然被分到了一个车厢,所以一路非常愉快地聊了过来。 挺好,最起…...
2024/4/26 22:01:59 - 氧生福地 玩美北湖(中)——永春梯田里的美与鲜
原标题:氧生福地 玩美北湖(中)——永春梯田里的美与鲜一觉醒来,因为大家太爱“美”照,在柳毅山庄去寻找龙女而错过了早餐时间。近十点,向导坏坏还是带着饥肠辘辘的我们去吃郴州最富有盛名的“鱼头粉”。说这是“十二分推荐”,到郴州必吃的美食之一。 哇塞!那个味美香甜…...
2024/4/25 18:39:14 - 氧生福地 玩美北湖(下)——奔跑吧骚年!
原标题:氧生福地 玩美北湖(下)——奔跑吧骚年!让我们红尘做伴 活得潇潇洒洒 策马奔腾共享人世繁华 对酒当歌唱出心中喜悦 轰轰烈烈把握青春年华 让我们红尘做伴 活得潇潇洒洒 策马奔腾共享人世繁华 对酒当歌唱出心中喜悦 轰轰烈烈把握青春年华 啊……啊……啊 两…...
2024/4/26 23:04:58 - 扒开伪装医用面膜,翻六倍价格宰客,小姐姐注意了!
原标题:扒开伪装医用面膜,翻六倍价格宰客,小姐姐注意了!扒开伪装医用面膜,翻六倍价格宰客!当行业里的某一品项火爆了,就会有很多商家蹭热度,装逼忽悠,最近火爆朋友圈的医用面膜,被沾上了污点,到底怎么回事呢? “比普通面膜安全、效果好!痘痘、痘印、敏感肌都能用…...
2024/4/25 2:10:52 - 「发现」铁皮石斛仙草之神奇功效用于医用面膜
原标题:「发现」铁皮石斛仙草之神奇功效用于医用面膜丽彦妆铁皮石斛医用面膜|石斛多糖无菌修护补水贴19大优势: 1、铁皮石斛:自唐宋以来,一直被列为皇室贡品,铁皮石斛生于海拔1600米的悬崖峭壁之上,繁殖力差,产量极低,所以古代仅供皇室、贵族享用 2、铁皮石斛自古民间…...
2024/4/25 18:39:00 - 丽彦妆\医用面膜\冷敷贴轻奢医学护肤引导者
原标题:丽彦妆\医用面膜\冷敷贴轻奢医学护肤引导者【公司简介】 广州华彬企业隶属香港华彬集团有限公司,专注美业21年,其旗下品牌: 「圣茵美」私密荷尔蒙抗衰,产后修复 「圣仪轩」私密荷尔蒙抗衰,产后修复 「花茵莳」私密荷尔蒙抗衰,产后修复 「丽彦妆」专注医学护…...
2024/4/26 19:46:12 - 广州械字号面膜生产厂家OEM/ODM4项须知!
原标题:广州械字号面膜生产厂家OEM/ODM4项须知!广州械字号面膜生产厂家OEM/ODM流程及注意事项解读: 械字号医用面膜,其实在我国并没有严格的定义,通常我们说的医美面膜指的应该是一种「医用敷料」,也就是说,医用面膜其实算作「医疗器械」的一种,又称「医用冷敷贴」。 …...
2024/4/27 11:43:08 - 械字号医用眼膜缓解用眼过度到底有无作用?
原标题:械字号医用眼膜缓解用眼过度到底有无作用?医用眼膜/械字号眼膜/医用冷敷眼贴 凝胶层为亲水高分子材料,含70%以上的水分。体表皮肤温度传导到本产品的凝胶层,热量被凝胶内水分子吸收,通过水分的蒸发带走大量的热量,可迅速地降低体表皮肤局部温度,减轻局部皮肤的灼…...
2024/4/27 8:32:30 - 配置失败还原请勿关闭计算机,电脑开机屏幕上面显示,配置失败还原更改 请勿关闭计算机 开不了机 这个问题怎么办...
解析如下:1、长按电脑电源键直至关机,然后再按一次电源健重启电脑,按F8健进入安全模式2、安全模式下进入Windows系统桌面后,按住“winR”打开运行窗口,输入“services.msc”打开服务设置3、在服务界面,选中…...
2022/11/19 21:17:18 - 错误使用 reshape要执行 RESHAPE,请勿更改元素数目。
%读入6幅图像(每一幅图像的大小是564*564) f1 imread(WashingtonDC_Band1_564.tif); subplot(3,2,1),imshow(f1); f2 imread(WashingtonDC_Band2_564.tif); subplot(3,2,2),imshow(f2); f3 imread(WashingtonDC_Band3_564.tif); subplot(3,2,3),imsho…...
2022/11/19 21:17:16 - 配置 已完成 请勿关闭计算机,win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机...
win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机”问题的解决方法在win7系统关机时如果有升级系统的或者其他需要会直接进入一个 等待界面,在等待界面中我们需要等待操作结束才能关机,虽然这比较麻烦,但是对系统进行配置和升级…...
2022/11/19 21:17:15 - 台式电脑显示配置100%请勿关闭计算机,“准备配置windows 请勿关闭计算机”的解决方法...
有不少用户在重装Win7系统或更新系统后会遇到“准备配置windows,请勿关闭计算机”的提示,要过很久才能进入系统,有的用户甚至几个小时也无法进入,下面就教大家这个问题的解决方法。第一种方法:我们首先在左下角的“开始…...
2022/11/19 21:17:14 - win7 正在配置 请勿关闭计算机,怎么办Win7开机显示正在配置Windows Update请勿关机...
置信有很多用户都跟小编一样遇到过这样的问题,电脑时发现开机屏幕显现“正在配置Windows Update,请勿关机”(如下图所示),而且还需求等大约5分钟才干进入系统。这是怎样回事呢?一切都是正常操作的,为什么开时机呈现“正…...
2022/11/19 21:17:13 - 准备配置windows 请勿关闭计算机 蓝屏,Win7开机总是出现提示“配置Windows请勿关机”...
Win7系统开机启动时总是出现“配置Windows请勿关机”的提示,没过几秒后电脑自动重启,每次开机都这样无法进入系统,此时碰到这种现象的用户就可以使用以下5种方法解决问题。方法一:开机按下F8,在出现的Windows高级启动选…...
2022/11/19 21:17:12 - 准备windows请勿关闭计算机要多久,windows10系统提示正在准备windows请勿关闭计算机怎么办...
有不少windows10系统用户反映说碰到这样一个情况,就是电脑提示正在准备windows请勿关闭计算机,碰到这样的问题该怎么解决呢,现在小编就给大家分享一下windows10系统提示正在准备windows请勿关闭计算机的具体第一种方法:1、2、依次…...
2022/11/19 21:17:11 - 配置 已完成 请勿关闭计算机,win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机”的解决方法...
今天和大家分享一下win7系统重装了Win7旗舰版系统后,每次关机的时候桌面上都会显示一个“配置Windows Update的界面,提示请勿关闭计算机”,每次停留好几分钟才能正常关机,导致什么情况引起的呢?出现配置Windows Update…...
2022/11/19 21:17:10 - 电脑桌面一直是清理请关闭计算机,windows7一直卡在清理 请勿关闭计算机-win7清理请勿关机,win7配置更新35%不动...
只能是等着,别无他法。说是卡着如果你看硬盘灯应该在读写。如果从 Win 10 无法正常回滚,只能是考虑备份数据后重装系统了。解决来方案一:管理员运行cmd:net stop WuAuServcd %windir%ren SoftwareDistribution SDoldnet start WuA…...
2022/11/19 21:17:09 - 计算机配置更新不起,电脑提示“配置Windows Update请勿关闭计算机”怎么办?
原标题:电脑提示“配置Windows Update请勿关闭计算机”怎么办?win7系统中在开机与关闭的时候总是显示“配置windows update请勿关闭计算机”相信有不少朋友都曾遇到过一次两次还能忍但经常遇到就叫人感到心烦了遇到这种问题怎么办呢?一般的方…...
2022/11/19 21:17:08 - 计算机正在配置无法关机,关机提示 windows7 正在配置windows 请勿关闭计算机 ,然后等了一晚上也没有关掉。现在电脑无法正常关机...
关机提示 windows7 正在配置windows 请勿关闭计算机 ,然后等了一晚上也没有关掉。现在电脑无法正常关机以下文字资料是由(历史新知网www.lishixinzhi.com)小编为大家搜集整理后发布的内容,让我们赶快一起来看一下吧!关机提示 windows7 正在配…...
2022/11/19 21:17:05 - 钉钉提示请勿通过开发者调试模式_钉钉请勿通过开发者调试模式是真的吗好不好用...
钉钉请勿通过开发者调试模式是真的吗好不好用 更新时间:2020-04-20 22:24:19 浏览次数:729次 区域: 南阳 > 卧龙 列举网提醒您:为保障您的权益,请不要提前支付任何费用! 虚拟位置外设器!!轨迹模拟&虚拟位置外设神器 专业用于:钉钉,外勤365,红圈通,企业微信和…...
2022/11/19 21:17:05 - 配置失败还原请勿关闭计算机怎么办,win7系统出现“配置windows update失败 还原更改 请勿关闭计算机”,长时间没反应,无法进入系统的解决方案...
前几天班里有位学生电脑(windows 7系统)出问题了,具体表现是开机时一直停留在“配置windows update失败 还原更改 请勿关闭计算机”这个界面,长时间没反应,无法进入系统。这个问题原来帮其他同学也解决过,网上搜了不少资料&#x…...
2022/11/19 21:17:04 - 一个电脑无法关闭计算机你应该怎么办,电脑显示“清理请勿关闭计算机”怎么办?...
本文为你提供了3个有效解决电脑显示“清理请勿关闭计算机”问题的方法,并在最后教给你1种保护系统安全的好方法,一起来看看!电脑出现“清理请勿关闭计算机”在Windows 7(SP1)和Windows Server 2008 R2 SP1中,添加了1个新功能在“磁…...
2022/11/19 21:17:03 - 请勿关闭计算机还原更改要多久,电脑显示:配置windows更新失败,正在还原更改,请勿关闭计算机怎么办...
许多用户在长期不使用电脑的时候,开启电脑发现电脑显示:配置windows更新失败,正在还原更改,请勿关闭计算机。。.这要怎么办呢?下面小编就带着大家一起看看吧!如果能够正常进入系统,建议您暂时移…...
2022/11/19 21:17:02 - 还原更改请勿关闭计算机 要多久,配置windows update失败 还原更改 请勿关闭计算机,电脑开机后一直显示以...
配置windows update失败 还原更改 请勿关闭计算机,电脑开机后一直显示以以下文字资料是由(历史新知网www.lishixinzhi.com)小编为大家搜集整理后发布的内容,让我们赶快一起来看一下吧!配置windows update失败 还原更改 请勿关闭计算机&#x…...
2022/11/19 21:17:01 - 电脑配置中请勿关闭计算机怎么办,准备配置windows请勿关闭计算机一直显示怎么办【图解】...
不知道大家有没有遇到过这样的一个问题,就是我们的win7系统在关机的时候,总是喜欢显示“准备配置windows,请勿关机”这样的一个页面,没有什么大碍,但是如果一直等着的话就要两个小时甚至更久都关不了机,非常…...
2022/11/19 21:17:00 - 正在准备配置请勿关闭计算机,正在准备配置windows请勿关闭计算机时间长了解决教程...
当电脑出现正在准备配置windows请勿关闭计算机时,一般是您正对windows进行升级,但是这个要是长时间没有反应,我们不能再傻等下去了。可能是电脑出了别的问题了,来看看教程的说法。正在准备配置windows请勿关闭计算机时间长了方法一…...
2022/11/19 21:16:59 - 配置失败还原请勿关闭计算机,配置Windows Update失败,还原更改请勿关闭计算机...
我们使用电脑的过程中有时会遇到这种情况,当我们打开电脑之后,发现一直停留在一个界面:“配置Windows Update失败,还原更改请勿关闭计算机”,等了许久还是无法进入系统。如果我们遇到此类问题应该如何解决呢࿰…...
2022/11/19 21:16:58 - 如何在iPhone上关闭“请勿打扰”
Apple’s “Do Not Disturb While Driving” is a potentially lifesaving iPhone feature, but it doesn’t always turn on automatically at the appropriate time. For example, you might be a passenger in a moving car, but your iPhone may think you’re the one dri…...
2022/11/19 21:16:57