视觉融合-相机校准与激光点云投影
Github: 添加链接描述
像平面坐标系到像素坐标系的转换
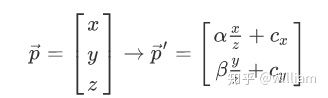
3D空间中的点在图像平面上的投影与我们在实际的数字图像中看到的并不直接对应, 实际的数字图像由数千个图片像素组成. 因此我们需要实现从图像平面到数字图像上的投影.
在下图中相机中心是O点, 伴随着坐标系i,j,k. 其中k指向图像平面. 与k轴位置相交的C点被称为主点, 代表着图像平面的中心. 以主点为原点的右手平面坐标系o-xy为像平面坐标系.
因此, 在空间上将点P投影到图像平面上之后的第一步是减去主点坐标, 以使离散图像具有其自身的坐标系, 例如该坐标系的中心为图像平面的左下角.
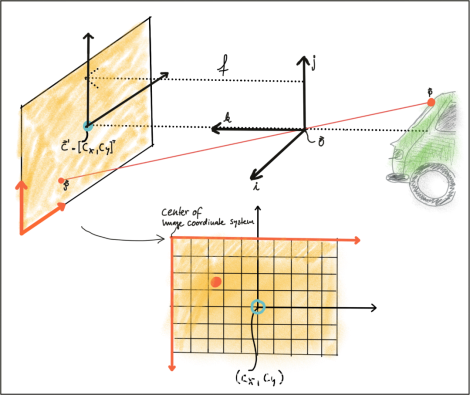
转换过程的第二步是从公制坐标(m)转换为像素坐标. 为此, 我们可以使用校准程序提供的参数k和l, 这些参数将将米转换为像素, 并且可以轻松地将其集成到投影方程式中, 如下所示. 请注意, 在像素坐标系中, y轴的原点位于左上角, 并指向下方.

fk一般在转换矩阵中称为alpha, fl称为beta.
相机校准(camera calibration)
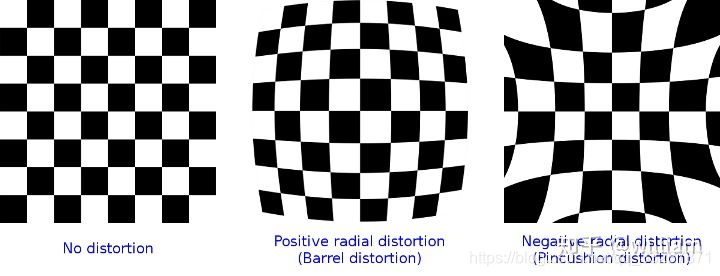
使用镜头虽然可以像针孔相机一样计算空间中的3D点通过镜头后在图像平面上的2D位置, 但是大部分镜头会将失真引入图像. 最常见的是变形称为“radial distortion”, 这是由于镜头的焦距在其直径上不一致. 一般情况镜头的放大效果根据相机中心(光轴)和通过镜头的光线之间的距离而变化. 如果放大倍数增加, 则产生的失真效果称为“pin cushion distortion”. 如果减小, 则称为“barrel distortion”. 使用广角镜如GOPRO时, 通常会发生” Barrel distortions“.
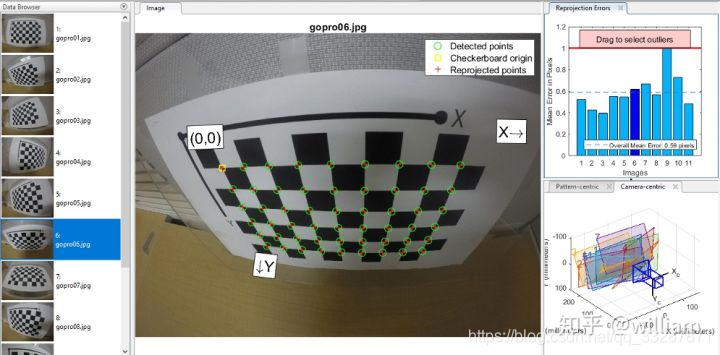
请记住, 如果我们需要通过图像得出关于目标物体(例如车辆)的空间位置, 一定要对相机进行畸变校准(calibration). 通常, 这是通过拍摄一组平面棋盘图案的图片来完成的, 可以从这些对象的已知几何形状中可靠地导出所有镜头和图像传感器参数. 消除相机图像失真的过程称为校正(rectification).
 网上有很多关于如何使用OPENCV对相机进行畸变校准的教程
网上有很多关于如何使用OPENCV对相机进行畸变校准的教程
Python
C++
可以尝试下MATLAB的方法:MATLAB
请注意得到相机内参和畸变参数的过程是畸变校准(calibration), 拿着相机内参和畸变参数去消除相机图像失真的才叫校正(rectification). 下文的KITTI数据集已经给出了相机内参和畸变参数, 因此不需要再去拍棋牌图校准了.
 在得到相机内参和畸变参数后可以通过OPENCV函数直接对图像进行校正, 你不需要了解复杂的公式.
在得到相机内参和畸变参数后可以通过OPENCV函数直接对图像进行校正, 你不需要了解复杂的公式.
畸变参数:注意有的文章中还会出现k4,k5,k6, 这三个参数基本用不到, 可以忽略.
[公式]
基于Python-opencv的畸变校准和校正可以遵循如下步骤:
// Converting an image, imported by cv2 or the glob API, to grayscale:
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
// ret, corners = cv2.findChessboardCorners(gray, (8,6), None)
ret, corners = cv2.findChessboardCorners(gray, (8,6), None)
// Drawing detected corners on an image:
img = cv2.drawChessboardCorners(img, (8,6), corners, ret)
// Camera calibration, given object points, image points, and the shape of the grayscale image
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
// Undistorting a test image
dst = cv2.undistort(img, mtx, dist, None, mtx)
而c++代码相对复杂, 在实际校正这一块, 首先调用 cv: : initundistortcorrectfymap 来查找转换矩阵, 然后使用 cv: : : remap 函数执行转换. 详情看上文中的教程链接.
CMOS 相机
CMOS (Complementary Metal-oxide Semiconductor)技术具有几个优点:与CCD(Charge-Coupled Device)不同, CMOS芯片集成了放大器和A / D转换器, 这带来了巨大的成本优势. 对于CCD, 这些组件位于芯片外部. CMOS传感器还具有更快的数据读取速度, 更低的功耗, 更高的抗噪能力以及更小的系统尺寸. 由于这些优点, 在汽车应用中, 几乎所有相机都使用CMOS传感器.
值得注意的是对于自动驾驶汽车的相机, 分辨率实际上并不是那么重要, 目前大部分汽车相机像素在1百万到8百万像素这个区间内, 相对于手机动辄1亿的像素小的不能再小了. 对于汽车相机重要的是感光度, 因为像素量越小, 像素面积越大, 意味着更多的光子落入一个像素, 具有更好的弱光可见性.
LIDAR Cloud Projection
齐次坐标系
在开始激光点云投影前, 首先我们得讨论什么是齐次坐标. 齐次坐标是指一个用于投影几何里的坐标系统, 如同欧几里得坐标系一样. 那我们为什么需要齐次坐标呢?欧几里得坐标系不是很好吗?
上文提过, 在相机世界中, 3D外界点转换到2D图像像素点转换方程是
我们可以通过相机的内在参数 intrinsic camera parameters 实现这一转换. 但是激光雷达的外部坐标系和相机的外部坐标系位置是不一样的. 因此除了构成投影几何形状的固有相机内参数外, 我们还需要有关相机和激光雷达在公共参考坐标系中的位置和对齐方式的其他信息. 几乎每一家自动驾驶厂商的激光雷达和相机的放置位置都是不一样的, 这些信息往往只能厂商给出.
从激光雷达的位置移动到相机的位置涉及平移和旋转操作, 我们需要将其应用于每个3D点. 问题在于我们得到的投影方程的问题是涉及到 z 的除法, 这使得它们是非线性的(3维), 从而使我们无法将它们转化为更方便的矩阵向量形式.
避免此问题的一种方法是同时更改激光雷达和相机的坐标系, 从原始的欧几里得坐标系转换为齐次坐标系的形式. 在两个欧几里得坐标系之间来回移动是一种非线性操作, 但是一旦我们处于齐次坐标系中, 投影变换将变为线性, 因此可以表示为简单的矩阵向量乘法. 两个坐标系之间的转换如下图所示.
欧几里得坐标->齐次坐标
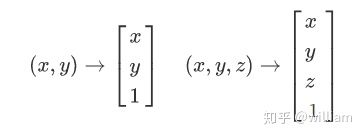
n维欧氏坐标系中的一个点由具有n个分量的向量表示. 通过简单地将数字1添加为附加分量, 可以实现到(n+1)维同构坐标的转换. 该变换可以应用于图像坐标(左侧)以及场景坐标(右侧).
// 1. Convert current Lidar point into homogeneous coordinates and store it in the 4D variable X.
X.at<double>(0, 0) = it->x;
X.at<double>(1, 0) = it->y;
X.at<double>(2, 0) = it->z;
X.at<double>(3, 0) = 1;
齐次坐标->欧几里得坐标
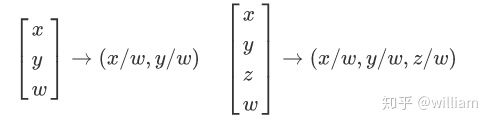
从齐次坐标转换回欧几里得坐标系, 只需要通过删除最后一个坐标并将前n个坐标除以第(n + 1)个坐标.
cv::Point pt;
pt.x = Y.at<double>(0, 0) / Y.at<double>(2, 0);
pt.y = Y.at<double>(1, 0) / Y.at<double>(2, 0);
内参矩阵
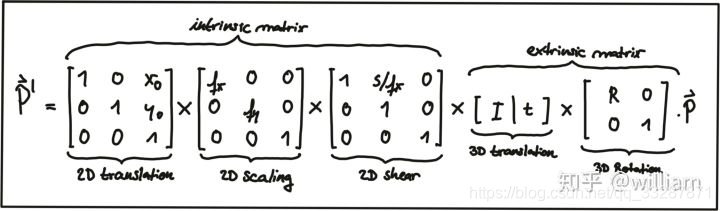
有了齐次坐标系的帮助, 我们可以用矩阵向量的形式表示投影方程了:
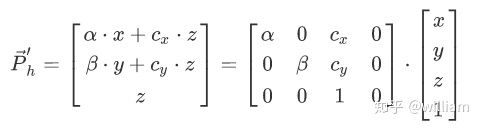
上述方程从左到右依次是齐次坐标系的相机投影几何转换矩阵/ 相机内参数矩阵K/ 齐次坐标点
相机内参数以矩阵形式排列, 可以方便地以紧凑的方式表示针孔相机模型的属性.
内参矩阵告诉你在外部世界的点在经过外参矩阵变换之后, 是如何继续经过摄像机的镜头、并通过针孔成像和电子转化而成为像素点的.
外参矩阵
现在我们已经实现了在相机坐标系中3D空间中的点P到2D像素平面中的点P’之间的映射.
但是激光雷达和相机的坐标系所在空间位置是不一样的, 它们都需要在车辆坐标系中进行校准.
如下是常见的车辆坐标系
 车辆坐标系的原点放置在后轴中点下方的地面上, x轴指向行驶方向.
车辆坐标系的原点放置在后轴中点下方的地面上, x轴指向行驶方向.
为了将在激光雷达传感器坐标系中测量的点投影到相机中, 我们需要在投影操作中添加其他转换, 以使我们能够将车辆坐标系中的点关联到相机坐标系, 反之亦然. 通常, 这种投影操作可以分为三个部分:平移, 旋转和缩放. 让我们依次看一下它们:
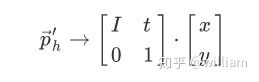
平移(translation):
通过添加平移向量t到P, 使得P点线性平移到新位置P’.

在齐次坐标中, 我们可以使用大小为N的单位矩阵I连接平移向量t表示.
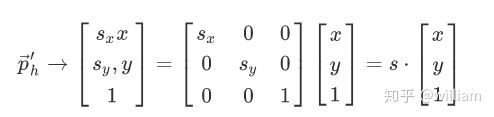
缩放(scale):
通过成分乘以尺度向量s实现缩放.
旋转(rotation):
下图为点P在顺时针方向上的旋转的实现:
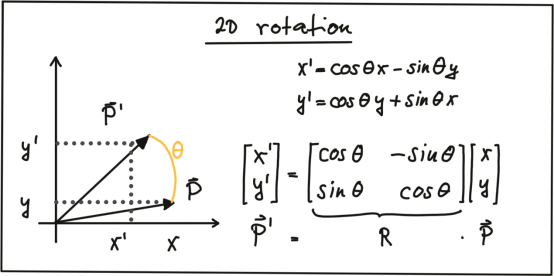
其中R被称为旋转矩阵. 在3D空间中, 点P的旋转是围绕x,y,z三个轴实现的, 因此可以表述为下面的旋转公式.
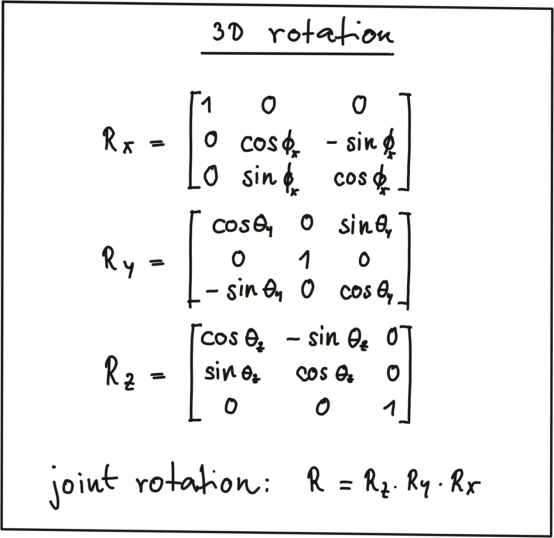
合在一起就是3D旋转公式.
齐次坐标的优点之一是, 它们可以通过级联几个矩阵-矢量乘法来轻松组合多个变换.
平移矩阵T和旋转矩阵R一起被称为外参矩阵. 它们共同描述了如何把点从世界坐标系转换到相机坐标系. 需要注意的是缩放成分S已集成到内矩阵中K, 因此不再是外参矩阵的一部分.
3D 投影方程
通过将各个外参矩阵和内参矩阵进行级联, 实现了3D激光雷达到2D图像平面上的投影.
 实现3D投影需要从完成这些坐标系的变换:
实现3D投影需要从完成这些坐标系的变换:
激光雷达世界坐标系->相机坐标系(激光雷达和相机都在车辆坐标系中进行位置校准, 从而互相关联)->像平面坐标系->像素坐标系.
欧几里得坐标系->齐次坐标系->欧几里得坐标系.
KITTI数据集介绍
我们高速公路相机图片,点云数据来自KITTI数据集,下面大概介绍下要用的KITTI传感器配置、标定参数说明:
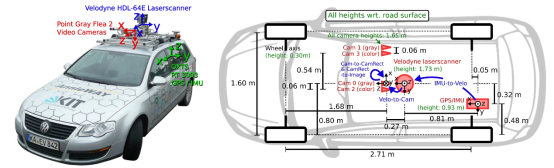
KITTI的传感器的布置
我们可以从KITTI的网站下载对应数据包的带有内参和外参的校准文件calib.zip.
calib.zip校准文件夹中包括三个子文件:calib_velo_to_cam.txt, calib_imu_to_velo.txt和calib_cam_to_cam.txt. calib_velo_to_cam.txt中的内容与Velodyne激光雷达和左灰色相机(编号为0)有关.
Velodyne激光雷达和左灰色相机(编号为0)有关.
calib_time: 15-Mar-2012 11:37:16
R: 7.533745e-03 -9.999714e-01 -6.166020e-04 1.480249e-02 7.280733e-04 -9.998902e-01 9.998621e-01 7.523790e-03 1.480755e-02
T: -4.069766e-03 -7.631618e-02 -2.717806e-01
其中矩阵R和T为我们提供了传感器设置的外参数.
R:3x3旋转矩阵
T:3x1平移向量
在文件 "calib_velo_to_cam.txt“ 中给了激光雷达到左边相机的平移、旋转参数:
calib_time: 15-Mar-2012 11:37:16R: 7.533745e-03 -9.999714e-01 -6.166020e-04 1.480249e-02 7.280733e-04 -9.998902e-01 9.998621e-01 7.523790e-03 1.480755e-02T: -4.069766e-03 -7.631618e-02 -2.717806e-01
在文件 “calib_cam_to_cam.txt” 中给了投影参数。
calib_time: 09-Jan-2012 13:57:47
…
R_rect_00: 9.999239e-01 9.837760e-03 -7.445048e-03 -9.869795e-03 9.999421e-01 -4.278459e-03 7.402527e-03 4.351614e-03 9.999631e-01P_rect_00: 7.215377e+02 0.000000e+00 6.095593e+02 0.000000e+00 0.000000e+00 7.215377e+02 1.728540e+02 0.000000e+00 0.000000e+00 0.000000e+00 1.000000e+00 0.000000e+00
…P_rect_00:就是上面的投影K值。
R_rect_00: is the 3x3 rectifying rotation to make image planes co-planar, i.e. to align both cameras of the stereo rig 。
calib_time: 09-Jan-2012 13:57:47
corner_dist: 9.950000e-02
S_00: 1.392000e+03 5.120000e+02
K_00: 9.842439e+02 0.000000e+00 6.900000e+02 0.000000e+00 9.808141e+02 2.331966e+02 0.000000e+00 0.000000e+00 1.000000e+00
D_00: -3.728755e-01 2.037299e-01 2.219027e-03 1.383707e-03 -7.233722e-02
R_00: 1.000000e+00 0.000000e+00 0.000000e+00 0.000000e+00 1.000000e+00 0.000000e+00 0.000000e+00 0.000000e+00 1.000000e+00
T_00: 2.573699e-16 -1.059758e-16 1.614870e-16
S_rect_00: 1.242000e+03 3.750000e+02
R_rect_00: 9.999239e-01 9.837760e-03 -7.445048e-03 -9.869795e-03 9.999421e-01 -4.278459e-03 7.402527e-03 4.351614e-03 9.999631e-01
P_rect_00: 7.215377e+02 0.000000e+00 6.095593e+02 0.000000e+00 0.000000e+00 7.215377e+02 1.728540e+02 0.000000e+00 0.000000e+00 0.000000e+00 1.000000e+00 0.000000e+00
....
....
S_03: 1.392000e+03 5.120000e+02
K_03: 9.037596e+02 0.000000e+00 6.957519e+02 0.000000e+00 9.019653e+02 2.242509e+02 0.000000e+00 0.000000e+00 1.000000e+00
D_03: -3.639558e-01 1.788651e-01 6.029694e-04 -3.922424e-04 -5.382460e-02
R_03: 9.995599e-01 1.699522e-02 -2.431313e-02 -1.704422e-02 9.998531e-01 -1.809756e-03 2.427880e-02 2.223358e-03 9.997028e-01
T_03: -4.731050e-01 5.551470e-03 -5.250882e-03
S_rect_03: 1.242000e+03 3.750000e+02
R_rect_03: 9.998321e-01 -7.193136e-03 1.685599e-02 7.232804e-03 9.999712e-01 -2.293585e-03 -1.683901e-02 2.415116e-03 9.998553e-01
P_rect_03: 7.215377e+02 0.000000e+00 6.095593e+02 -3.395242e+02 0.000000e+00 7.215377e+02 1.728540e+02 2.199936e+00 0.000000e+00 0.000000e+00 1.000000e+00 2.729905e-03
其中00,01,02,03 代表相机的编号, 0表示左边灰度相机, 1右边灰度相机, 2左边彩色相机, 3右边彩色相机.
S_xx:1x2 矫正前的图像xx的大小
K_xx:3x3 矫正前相机xx的校准矩阵
D_xx:1x5 矫正前相机xx的失真向量形式是[k1, k2, p1, p2, k3] . k1, k2 和k3 是径向畸变系数, 而p1 和p2 是切向畸变系数.
R_xx:3x3 (外部)的旋转矩阵(从相机0到相机xx)
T_xx:3x1 (外部)的平移矢量(从相机0到相机xx)
S_rect_xx:1x2 矫正后的图像xx的大小
R_rect_xx:3x3 纠正旋转矩阵(使图像平面共面)即以立体方式对齐两个立体相机的摄像头(KITTI车辆中有两个Point Grey摄像头)
P_rect_xx:3x4 矫正后的投影矩阵, 包含上述的相机内参矩阵K.
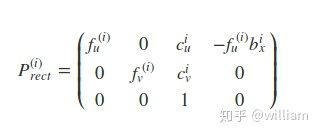
fu/fv 为相机焦距, 一般相同, cu/cv为主点坐标(相对于成像平面), s为坐标轴倾斜参数, 理想情况下为0. b(i) 代表其他相机相对于cam 0的偏移. 在从相机0投影到其他相机时需要.
以下等式说明了如何使用齐次坐标在相机0的图像平面上将空间中的3D激光雷达点X投影到2D像素点Y(使用Kitti自述文件中的表示法):

RT_velo_to_cam * x :是将Velodyne坐标中的点x投影到编号为0的相机(参考相机)坐标系中
R_rect00 *RT_velo_to_cam * x :是将Velodyne坐标中的点x投影到编号为0的相机(参考相机)坐标系中, 再以参考相机0为基础进行图像共面对齐修正(这是使用KITTI数据集的进行3D投影的必要操作)
P_rect_00 * R_rect00 *RT_velo_to_cam * x :是将Velodyne坐标中的点x投影到编号为0的相机(参考相机)坐标系中, 再进行图像共面对齐修正, 然后投影到相机0的像素坐标系中. 如果将P_rect_00改成P_rect_2, 也就是从参考相机0投影到相机2的像素坐标系中(其他相机相对与相机0有偏移b(i)).
以下为实现激光雷达3D点云投影到2D图像平面的步骤:
// 1. Convert current Lidar point into homogeneous coordinates and store it in the 4D variable X.X.at<double>(0, 0) = it->x;X.at<double>(1, 0) = it->y;X.at<double>(2, 0) = it->z;X.at<double>(3, 0) = 1;// 2. Then, apply the projection equation as detailed in lesson 5.1 to map X onto the image plane of the camera.
// Store the result in Y.
Y = P_rect_00 * R_rect_00 * RT * X;// 3. Once this is done, transform Y back into Euclidean coordinates and store the result in the variable pt.
cv::Point pt;
pt.x = Y.at<double>(0, 0) / Y.at<double>(2,0);
pt.y = Y.at<double>(1, 0) / Y.at<double>(2,0);
投影前处理
点云开始向像平面投影之前需要对其进行处理,需要把下面这些点云过滤掉:
… positioned behind the Lidar sensor and thus have a negative x coordinate.
… too far away in x-direction and thus exceeding an upper distance limit.
… too far off to the sides in y-direction and thus not relevant for collision detection
… too close to the road surface in negative z-direction.
… showing a reflectivity close to zero, which might indicate low reliability.
for(auto it=lidarPoints.begin(); it!=lidarPoints.end(); ++it) {
float maxX = 25.0, maxY = 6.0, minZ = -1.4;
if(it->x > maxX || it->x < 0.0 || abs(it->y) > maxY || it->z < minZ || it->r<0.01 )
{
continue; // skip to next point
}
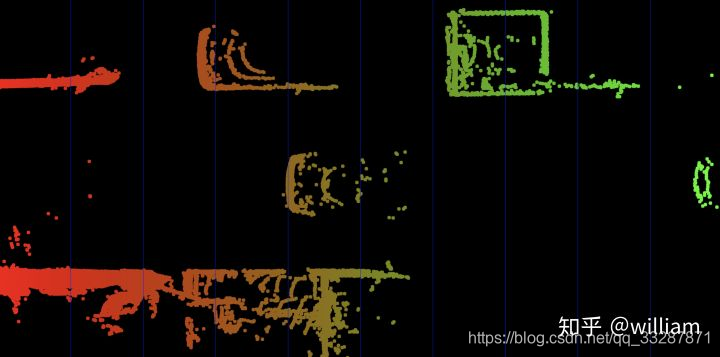
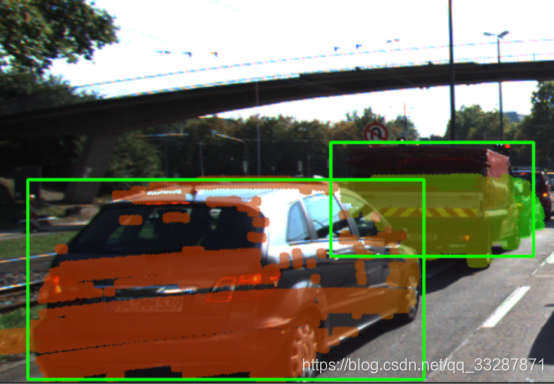
最后得到的投影结果如下:

点云投影之后,需要对点云进行聚类,表明那些点云属于属于一个目标。联合 YOLO目标检测 讲过的框图,可以将投影到框图内的点云聚类成一类,得到下面的结果:
关于框图的所包含的数据如下:
struct BoundingBox { // bounding box around a classified object (contains both 2D and 3D data)
int boxID; // unique identifier for this bounding box
int trackID; // unique identifier for the track to which this bounding box belongscv::Rect roi; // 2D region-of-interest in image coordinates
int classID; // ID based on class file provided to YOLO framework
double confidence; // classification truststd::vector<LidarPoint> lidarPoints; // Lidar 3D points which project into 2D image roi
std::vector<cv::KeyPoint> keypoints; // keypoints enclosed by 2D roi
std::vector<cv::DMatch> kptMatches; // keypoint matches enclosed by 2D roi
};
一些问题:
发现框图往往会比实际物体大一些,这样的话,会把一些不属于目标物体的点,聚类到该物体上了。所以往往会在原来框图的基础上缩小一定比例,然后将投影在缩小之后的小框图上的点保留,下面分别是缩小10%,25%的结果。

实际运用过程中往往会缩小5-10%,会达到比较好的聚类效果。
框图交叉时,有些点云会同时属于多个框图,造成聚类错误,比如下面的情景:
常规的做法是,将同时属于多个框图的点云去除掉,避免的它们的干扰。
算法运用
算法的应用,详见github,SFND_3D_Object_Tracking 。
https://github.com/godloveliang/SFND_3D_Object_Tracking
如若内容造成侵权/违法违规/事实不符,请联系编程学习网邮箱:809451989@qq.com进行投诉反馈,一经查实,立即删除!
相关文章
- 笑看女程序员征婚SQL,半夜巡逻民警突然对我大喊int类型占几个字节
女程序员是这么征婚的: SELECT * FROM 男人们 WHERE 未婚=true and 同性恋=false and 有房=true and 有车=true and 条件 in (帅气,绅士,大度,气质,智慧,温柔,体贴,会浪漫,活泼,可爱,最好还能带孩子) and 年龄 between(24, 40) Order by 存款 序员的成长 我是个程序员,大学刚…...
2024/5/4 0:02:55 - 如何解决Redis热点数据高频访问问题
在日常开发过程,一般在使用Redis时,都是采用的集群的方式,而很少采用单机的方式。我们知道在Redis集群中,是通过按照槽点的划分来决定数据最终落在哪个Redis节点上。在集群中,一共存在16384个槽点,如果我们的集群有3个节点组成的话,那么由这3个节点来均分这16384个槽点。…...
2024/5/4 2:28:33 - 【新书推荐】【2020】基于Matlab/Simulink的Pid控制系统设计与自动微调
涵盖了从最基本到高级的PID控制系统主题 Covers PID control systems from the very basics to the advanced topics 本书涵盖了设计、实施和自动微调的基于操作约束的PID控制系统。 This book covers the design, implementation and automatic tuning of PID control systems…...
2024/4/24 9:33:03 - 分布式与并发【三】浅谈分布式一致性算法Paxos
一、前言 说到分布式一致性算法,那么必然不可避免谈到Paxos,Paxos算法在分布式领域地位非常重要,接下来简单记录下Paxos算法的原理。由于个人水平有限,如有错误还请谅解,本文参考书籍《从Paxos到ZooKeeper》与一些网络博客。 二、背景 在分布式系统中,经常会发生例如网络…...
2024/4/24 9:33:05 - Redis持久化机制
RDB: 快照,把当前的二进制文件存起来 通过redis的bgsave和save命令生成RDB文件 执行bgsave指令生成RDB的过程:首先判断是否有save,如果有就会停止其中的一个(按照先后顺序,后来的不能执行),创建一个子进程,同时把子父进程分开,子进程执行持久化(生成的RDB是临时文件),…...
2024/5/4 10:26:45 - jquery选择器和dom选择器区别
1. jquery选择器css $("#file_loading").css("visibility", "visible")2. dom选择器stylr document.getElementBuyid("file_loading").style.visibility = "visible"因为jquery没有.css属性 3. jquery选择器attr $("im…...
2024/4/28 11:24:13 - C++常识1:字符串末尾为什么要加‘\0’
在C/C++语言中,字符串是用字符数组来表示的。 但是,字符数组中的内容,直接显示,可能会出现乱码,因为编译器从物理内存中解释字符串时,从数组头部开始依次显示字符,编译器并不知道要到哪里结束,若把不属于字符串的内容当做字符串的内容来解释了,就会出现乱码,因此要约…...
2024/4/29 2:25:17 - Xpath系统详解
1. 语法 1.节点的选取路径表达式 结果nodename 选取此节点的所有子节点。/ 从根节点选取// 从匹配选择的当前节点选择文档中的节点,而不考虑它们的位置. 选取当前节点。. . 选取当前节点的父节点。@ 选取属性。例子 <?xml version="1.0" encoding="UTF-8&q…...
2024/4/28 2:26:48 - Window下维护SQLServer数据库(一)
记录一下使用,避免下次使用忘记 一、 SQLServer数据库得安装 百度中很多,本人一般参考 https://jingyan.baidu.com/article/948f592434b407d80ef5f97d.html 注意事项:SQLServer 2008 安装得时候会把服务器等功能都安装上,而2016及以上需要自己下载安装SMSS管理工具。 功能列…...
2024/4/28 2:43:37 - 类名.class 、Class.forName(“类名全路径”)、类实例.getClass()的区别
在学习spring ioc过程中,回顾了反射技术,发现对这个三种方式生成的Class不是太明白,顾将三种方式的进行整理: 类名.class JVM将使用类装载器, 将类装入内存(前提是:类还没有装入内存),不做类的初始化工作.返回Class的对象 Class.forName(“类名全路径”) (包名+类名) 装…...
2024/4/28 1:45:10 - pandas入门:使用 loc 和 iloc 选择数据,算术和数据对齐,使用填充值的算数方法,DataFrame and Series 间的操作
使用 loc 和 iloc 选择数据 之前提到过,这个方法可以更加简洁的标签索引。。。针对dataframe 在行上的标签索引,可以使用轴标签(loc) 或整数标签( iloc ) 以numpy 风格的语法从 dataframe 中选出数据组的行和列的子集。 frame = pd.DataFrame(np.arange(9).reshape((3,3)),…...
2024/5/4 0:14:45 - 5G系列协议--3GPP--Release 16--TS 38.201--NR:物理层;总体描述
5G系列协议--3GPP--Release 16--TS 38.201--NR:物理层;总体描述1.范围2.缩写3.layer 1的一般描述3.1 与其他layer的关系3.1.1 一般协议体系结构3.1.2 服务提供给更高的层3.2 概述3.2.1 多路访问(Multiple access)3.2.2 物理信道与调制(Physical channels and modulation)3.2.3…...
2024/4/28 7:57:35 - 高等数学学习笔记——第九十五讲——函数的幂级数展开
一、问题的导入——函数展开成幂级数的条件是什么?若能展开,如何确定系数与收敛区间?二、泰勒级数的概念1. 系数的确定2. 泰勒级数、麦克劳林级数的定义三、泰勒级数展开的条件1. 泰勒级数展开的充要条件2. 泰勒级数展开的充分条件四、泰勒级数展开的方法1. 公式法2. 用公式…...
2024/4/28 16:34:49 - 将两个音乐文件合并为一个音乐文件、将两个文本文件合并为一个文本文件、断点下载功能
将两个音乐文件合并为一个音乐文件、将两个文本文件合并为一个文本文件、将多个文本文件合并为同一个文本文件、断点下载功能 将两个音乐文件合并为一个音乐文件public class MyTest1 {public static void main(String[] args) throws IOException {//把多首歌合并成一首歌File…...
2024/4/27 16:40:13 - idea中SpringBoot热部署
首先: 开启工程自动编译:再者: 添加pom依赖:然后: 点击help->Find Action,输入Registry,开启这三个设置:最后:重启idea...
2024/4/29 1:51:39 - Vue 生命周期详解
本文章主要介绍在全局混入、多个混入情况下初始化渲染的生命周期、更新生命周期以及销毁的生命周期。 项目地址:vue-lifecycle 演示地址:vue-lifecycle 目录说明 src/mixin 目录下放的是不同组件或者页面的混入。文件 说明allMixin.js 为全局混入appAMixin.js app.vue 的 AMi…...
2024/4/28 3:16:45 - leetcode50. Pow(x, n)
传送门 题目:实现 pow(x, n) ,即计算 x 的 n 次幂函数。 输入: 2.00000, 10 输出: 1024.00000 输入: 2.10000, 3 输出: 9.26100 把指数n 每次以2的指数倍下降 把之前算过的结果利用起来 比如 计算2的8次方时,把之前计算的2的4次方平方即可。 public double myPow(doubl…...
2024/4/28 6:33:40 - 2018.6.1
2018.6.1 from Fridge import Fridge from Recipe import Recipe from Omelet import Omelet__all__ = [Fridge, Recipe, Omelet]...
2024/4/28 2:45:01 - [环境部署]Redis环境部署
Redis环境部署下载和编译社区地址:https://redis.io/戳download下载稳定版(stable)下载到本地为tar.gz文件解压后目录基本如下Redis是C语言项目,下载下来的是源码,所以需要进行编译,按照download页面最下方的Installation的说明进行编译即可编译后在src目录中可看到编译产…...
2024/4/28 3:55:32 - 微波功率测量
1. 为什么要测功率:在高频,沿传输线,电压和电流是变化的量,不是常数,而功率是常数。并且,知道雷达发射机的功率就可以知道雷达的作用范围;通信系统中功放的发射功率可以确定覆盖范围等等2. dBm的算法:每增加3dBm,功率增加一倍、每减少3dBm,功率减半、每10dBm为10倍、每…...
2024/4/28 1:01:15
最新文章
- FIFO Generate IP核使用——Native读写接口信号详解
Native FIFO接口信号是用于FIFO IP核与外部电路进行通信的信号。当FIFO支持独立的写和读时钟时,这些信号可以包括标准端口和可选端口。 1 当FIFO具有独立时钟时的接口信号 当FIFO具有独立的时钟时,其接口信号会相应地有所变化。特别是关于复位信号rst…...
2024/5/4 13:06:39 - 梯度消失和梯度爆炸的一些处理方法
在这里是记录一下梯度消失或梯度爆炸的一些处理技巧。全当学习总结了如有错误还请留言,在此感激不尽。 权重和梯度的更新公式如下: w w − η ⋅ ∇ w w w - \eta \cdot \nabla w ww−η⋅∇w 个人通俗的理解梯度消失就是网络模型在反向求导的时候出…...
2024/3/20 10:50:27 - 基于单片机的数字万用表设计
**单片机设计介绍,基于单片机的数字万用表设计 文章目录 一 概要二、功能设计设计思路 三、 软件设计原理图 五、 程序六、 文章目录 一 概要 基于单片机的数字万用表设计概要是关于使用单片机技术来实现数字万用表功能的一种设计方案。下面将详细概述该设计的各个…...
2024/5/4 12:58:13 - __dirname 在ES模块中的使用
前言 ECMAScript模块是 JavaScript 的新标准格式。在Node.js中越来越多的库逐渐从从CommonJS转移到ES模块 注:这里是指“真”ES 模块并不是指代码中 Node.js 中使用 import 写法但是实际被 tsc 转成 commonJS 的形式 但是Node.js ES 开发中此前有一个棘手的问题是获…...
2024/5/3 10:58:45 - 【外汇早评】美通胀数据走低,美元调整
原标题:【外汇早评】美通胀数据走低,美元调整昨日美国方面公布了新一期的核心PCE物价指数数据,同比增长1.6%,低于前值和预期值的1.7%,距离美联储的通胀目标2%继续走低,通胀压力较低,且此前美国一季度GDP初值中的消费部分下滑明显,因此市场对美联储后续更可能降息的政策…...
2024/5/1 17:30:59 - 【原油贵金属周评】原油多头拥挤,价格调整
原标题:【原油贵金属周评】原油多头拥挤,价格调整本周国际劳动节,我们喜迎四天假期,但是整个金融市场确实流动性充沛,大事频发,各个商品波动剧烈。美国方面,在本周四凌晨公布5月份的利率决议和新闻发布会,维持联邦基金利率在2.25%-2.50%不变,符合市场预期。同时美联储…...
2024/5/2 16:16:39 - 【外汇周评】靓丽非农不及疲软通胀影响
原标题:【外汇周评】靓丽非农不及疲软通胀影响在刚结束的周五,美国方面公布了新一期的非农就业数据,大幅好于前值和预期,新增就业重新回到20万以上。具体数据: 美国4月非农就业人口变动 26.3万人,预期 19万人,前值 19.6万人。 美国4月失业率 3.6%,预期 3.8%,前值 3…...
2024/4/29 2:29:43 - 【原油贵金属早评】库存继续增加,油价收跌
原标题:【原油贵金属早评】库存继续增加,油价收跌周三清晨公布美国当周API原油库存数据,上周原油库存增加281万桶至4.692亿桶,增幅超过预期的74.4万桶。且有消息人士称,沙特阿美据悉将于6月向亚洲炼油厂额外出售更多原油,印度炼油商预计将每日获得至多20万桶的额外原油供…...
2024/5/3 23:10:03 - 【外汇早评】日本央行会议纪要不改日元强势
原标题:【外汇早评】日本央行会议纪要不改日元强势近两日日元大幅走强与近期市场风险情绪上升,避险资金回流日元有关,也与前一段时间的美日贸易谈判给日本缓冲期,日本方面对汇率问题也避免继续贬值有关。虽然今日早间日本央行公布的利率会议纪要仍然是支持宽松政策,但这符…...
2024/4/27 17:58:04 - 【原油贵金属早评】欧佩克稳定市场,填补伊朗问题的影响
原标题:【原油贵金属早评】欧佩克稳定市场,填补伊朗问题的影响近日伊朗局势升温,导致市场担忧影响原油供给,油价试图反弹。此时OPEC表态稳定市场。据消息人士透露,沙特6月石油出口料将低于700万桶/日,沙特已经收到石油消费国提出的6月份扩大出口的“适度要求”,沙特将满…...
2024/4/27 14:22:49 - 【外汇早评】美欲与伊朗重谈协议
原标题:【外汇早评】美欲与伊朗重谈协议美国对伊朗的制裁遭到伊朗的抗议,昨日伊朗方面提出将部分退出伊核协议。而此行为又遭到欧洲方面对伊朗的谴责和警告,伊朗外长昨日回应称,欧洲国家履行它们的义务,伊核协议就能保证存续。据传闻伊朗的导弹已经对准了以色列和美国的航…...
2024/4/28 1:28:33 - 【原油贵金属早评】波动率飙升,市场情绪动荡
原标题:【原油贵金属早评】波动率飙升,市场情绪动荡因中美贸易谈判不安情绪影响,金融市场各资产品种出现明显的波动。随着美国与中方开启第十一轮谈判之际,美国按照既定计划向中国2000亿商品征收25%的关税,市场情绪有所平复,已经开始接受这一事实。虽然波动率-恐慌指数VI…...
2024/4/30 9:43:09 - 【原油贵金属周评】伊朗局势升温,黄金多头跃跃欲试
原标题:【原油贵金属周评】伊朗局势升温,黄金多头跃跃欲试美国和伊朗的局势继续升温,市场风险情绪上升,避险黄金有向上突破阻力的迹象。原油方面稍显平稳,近期美国和OPEC加大供给及市场需求回落的影响,伊朗局势并未推升油价走强。近期中美贸易谈判摩擦再度升级,美国对中…...
2024/4/27 17:59:30 - 【原油贵金属早评】市场情绪继续恶化,黄金上破
原标题:【原油贵金属早评】市场情绪继续恶化,黄金上破周初中国针对于美国加征关税的进行的反制措施引发市场情绪的大幅波动,人民币汇率出现大幅的贬值动能,金融市场受到非常明显的冲击。尤其是波动率起来之后,对于股市的表现尤其不安。隔夜美国股市出现明显的下行走势,这…...
2024/5/2 15:04:34 - 【外汇早评】美伊僵持,风险情绪继续升温
原标题:【外汇早评】美伊僵持,风险情绪继续升温昨日沙特两艘油轮再次发生爆炸事件,导致波斯湾局势进一步恶化,市场担忧美伊可能会出现摩擦生火,避险品种获得支撑,黄金和日元大幅走强。美指受中美贸易问题影响而在低位震荡。继5月12日,四艘商船在阿联酋领海附近的阿曼湾、…...
2024/4/28 1:34:08 - 【原油贵金属早评】贸易冲突导致需求低迷,油价弱势
原标题:【原油贵金属早评】贸易冲突导致需求低迷,油价弱势近日虽然伊朗局势升温,中东地区几起油船被袭击事件影响,但油价并未走高,而是出于调整结构中。由于市场预期局势失控的可能性较低,而中美贸易问题导致的全球经济衰退风险更大,需求会持续低迷,因此油价调整压力较…...
2024/4/26 19:03:37 - 氧生福地 玩美北湖(上)——为时光守候两千年
原标题:氧生福地 玩美北湖(上)——为时光守候两千年一次说走就走的旅行,只有一张高铁票的距离~ 所以,湖南郴州,我来了~ 从广州南站出发,一个半小时就到达郴州西站了。在动车上,同时改票的南风兄和我居然被分到了一个车厢,所以一路非常愉快地聊了过来。 挺好,最起…...
2024/4/29 20:46:55 - 氧生福地 玩美北湖(中)——永春梯田里的美与鲜
原标题:氧生福地 玩美北湖(中)——永春梯田里的美与鲜一觉醒来,因为大家太爱“美”照,在柳毅山庄去寻找龙女而错过了早餐时间。近十点,向导坏坏还是带着饥肠辘辘的我们去吃郴州最富有盛名的“鱼头粉”。说这是“十二分推荐”,到郴州必吃的美食之一。 哇塞!那个味美香甜…...
2024/4/30 22:21:04 - 氧生福地 玩美北湖(下)——奔跑吧骚年!
原标题:氧生福地 玩美北湖(下)——奔跑吧骚年!让我们红尘做伴 活得潇潇洒洒 策马奔腾共享人世繁华 对酒当歌唱出心中喜悦 轰轰烈烈把握青春年华 让我们红尘做伴 活得潇潇洒洒 策马奔腾共享人世繁华 对酒当歌唱出心中喜悦 轰轰烈烈把握青春年华 啊……啊……啊 两…...
2024/5/1 4:32:01 - 扒开伪装医用面膜,翻六倍价格宰客,小姐姐注意了!
原标题:扒开伪装医用面膜,翻六倍价格宰客,小姐姐注意了!扒开伪装医用面膜,翻六倍价格宰客!当行业里的某一品项火爆了,就会有很多商家蹭热度,装逼忽悠,最近火爆朋友圈的医用面膜,被沾上了污点,到底怎么回事呢? “比普通面膜安全、效果好!痘痘、痘印、敏感肌都能用…...
2024/5/4 2:59:34 - 「发现」铁皮石斛仙草之神奇功效用于医用面膜
原标题:「发现」铁皮石斛仙草之神奇功效用于医用面膜丽彦妆铁皮石斛医用面膜|石斛多糖无菌修护补水贴19大优势: 1、铁皮石斛:自唐宋以来,一直被列为皇室贡品,铁皮石斛生于海拔1600米的悬崖峭壁之上,繁殖力差,产量极低,所以古代仅供皇室、贵族享用 2、铁皮石斛自古民间…...
2024/4/28 5:48:52 - 丽彦妆\医用面膜\冷敷贴轻奢医学护肤引导者
原标题:丽彦妆\医用面膜\冷敷贴轻奢医学护肤引导者【公司简介】 广州华彬企业隶属香港华彬集团有限公司,专注美业21年,其旗下品牌: 「圣茵美」私密荷尔蒙抗衰,产后修复 「圣仪轩」私密荷尔蒙抗衰,产后修复 「花茵莳」私密荷尔蒙抗衰,产后修复 「丽彦妆」专注医学护…...
2024/4/30 9:42:22 - 广州械字号面膜生产厂家OEM/ODM4项须知!
原标题:广州械字号面膜生产厂家OEM/ODM4项须知!广州械字号面膜生产厂家OEM/ODM流程及注意事项解读: 械字号医用面膜,其实在我国并没有严格的定义,通常我们说的医美面膜指的应该是一种「医用敷料」,也就是说,医用面膜其实算作「医疗器械」的一种,又称「医用冷敷贴」。 …...
2024/5/2 9:07:46 - 械字号医用眼膜缓解用眼过度到底有无作用?
原标题:械字号医用眼膜缓解用眼过度到底有无作用?医用眼膜/械字号眼膜/医用冷敷眼贴 凝胶层为亲水高分子材料,含70%以上的水分。体表皮肤温度传导到本产品的凝胶层,热量被凝胶内水分子吸收,通过水分的蒸发带走大量的热量,可迅速地降低体表皮肤局部温度,减轻局部皮肤的灼…...
2024/4/30 9:42:49 - 配置失败还原请勿关闭计算机,电脑开机屏幕上面显示,配置失败还原更改 请勿关闭计算机 开不了机 这个问题怎么办...
解析如下:1、长按电脑电源键直至关机,然后再按一次电源健重启电脑,按F8健进入安全模式2、安全模式下进入Windows系统桌面后,按住“winR”打开运行窗口,输入“services.msc”打开服务设置3、在服务界面,选中…...
2022/11/19 21:17:18 - 错误使用 reshape要执行 RESHAPE,请勿更改元素数目。
%读入6幅图像(每一幅图像的大小是564*564) f1 imread(WashingtonDC_Band1_564.tif); subplot(3,2,1),imshow(f1); f2 imread(WashingtonDC_Band2_564.tif); subplot(3,2,2),imshow(f2); f3 imread(WashingtonDC_Band3_564.tif); subplot(3,2,3),imsho…...
2022/11/19 21:17:16 - 配置 已完成 请勿关闭计算机,win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机...
win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机”问题的解决方法在win7系统关机时如果有升级系统的或者其他需要会直接进入一个 等待界面,在等待界面中我们需要等待操作结束才能关机,虽然这比较麻烦,但是对系统进行配置和升级…...
2022/11/19 21:17:15 - 台式电脑显示配置100%请勿关闭计算机,“准备配置windows 请勿关闭计算机”的解决方法...
有不少用户在重装Win7系统或更新系统后会遇到“准备配置windows,请勿关闭计算机”的提示,要过很久才能进入系统,有的用户甚至几个小时也无法进入,下面就教大家这个问题的解决方法。第一种方法:我们首先在左下角的“开始…...
2022/11/19 21:17:14 - win7 正在配置 请勿关闭计算机,怎么办Win7开机显示正在配置Windows Update请勿关机...
置信有很多用户都跟小编一样遇到过这样的问题,电脑时发现开机屏幕显现“正在配置Windows Update,请勿关机”(如下图所示),而且还需求等大约5分钟才干进入系统。这是怎样回事呢?一切都是正常操作的,为什么开时机呈现“正…...
2022/11/19 21:17:13 - 准备配置windows 请勿关闭计算机 蓝屏,Win7开机总是出现提示“配置Windows请勿关机”...
Win7系统开机启动时总是出现“配置Windows请勿关机”的提示,没过几秒后电脑自动重启,每次开机都这样无法进入系统,此时碰到这种现象的用户就可以使用以下5种方法解决问题。方法一:开机按下F8,在出现的Windows高级启动选…...
2022/11/19 21:17:12 - 准备windows请勿关闭计算机要多久,windows10系统提示正在准备windows请勿关闭计算机怎么办...
有不少windows10系统用户反映说碰到这样一个情况,就是电脑提示正在准备windows请勿关闭计算机,碰到这样的问题该怎么解决呢,现在小编就给大家分享一下windows10系统提示正在准备windows请勿关闭计算机的具体第一种方法:1、2、依次…...
2022/11/19 21:17:11 - 配置 已完成 请勿关闭计算机,win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机”的解决方法...
今天和大家分享一下win7系统重装了Win7旗舰版系统后,每次关机的时候桌面上都会显示一个“配置Windows Update的界面,提示请勿关闭计算机”,每次停留好几分钟才能正常关机,导致什么情况引起的呢?出现配置Windows Update…...
2022/11/19 21:17:10 - 电脑桌面一直是清理请关闭计算机,windows7一直卡在清理 请勿关闭计算机-win7清理请勿关机,win7配置更新35%不动...
只能是等着,别无他法。说是卡着如果你看硬盘灯应该在读写。如果从 Win 10 无法正常回滚,只能是考虑备份数据后重装系统了。解决来方案一:管理员运行cmd:net stop WuAuServcd %windir%ren SoftwareDistribution SDoldnet start WuA…...
2022/11/19 21:17:09 - 计算机配置更新不起,电脑提示“配置Windows Update请勿关闭计算机”怎么办?
原标题:电脑提示“配置Windows Update请勿关闭计算机”怎么办?win7系统中在开机与关闭的时候总是显示“配置windows update请勿关闭计算机”相信有不少朋友都曾遇到过一次两次还能忍但经常遇到就叫人感到心烦了遇到这种问题怎么办呢?一般的方…...
2022/11/19 21:17:08 - 计算机正在配置无法关机,关机提示 windows7 正在配置windows 请勿关闭计算机 ,然后等了一晚上也没有关掉。现在电脑无法正常关机...
关机提示 windows7 正在配置windows 请勿关闭计算机 ,然后等了一晚上也没有关掉。现在电脑无法正常关机以下文字资料是由(历史新知网www.lishixinzhi.com)小编为大家搜集整理后发布的内容,让我们赶快一起来看一下吧!关机提示 windows7 正在配…...
2022/11/19 21:17:05 - 钉钉提示请勿通过开发者调试模式_钉钉请勿通过开发者调试模式是真的吗好不好用...
钉钉请勿通过开发者调试模式是真的吗好不好用 更新时间:2020-04-20 22:24:19 浏览次数:729次 区域: 南阳 > 卧龙 列举网提醒您:为保障您的权益,请不要提前支付任何费用! 虚拟位置外设器!!轨迹模拟&虚拟位置外设神器 专业用于:钉钉,外勤365,红圈通,企业微信和…...
2022/11/19 21:17:05 - 配置失败还原请勿关闭计算机怎么办,win7系统出现“配置windows update失败 还原更改 请勿关闭计算机”,长时间没反应,无法进入系统的解决方案...
前几天班里有位学生电脑(windows 7系统)出问题了,具体表现是开机时一直停留在“配置windows update失败 还原更改 请勿关闭计算机”这个界面,长时间没反应,无法进入系统。这个问题原来帮其他同学也解决过,网上搜了不少资料&#x…...
2022/11/19 21:17:04 - 一个电脑无法关闭计算机你应该怎么办,电脑显示“清理请勿关闭计算机”怎么办?...
本文为你提供了3个有效解决电脑显示“清理请勿关闭计算机”问题的方法,并在最后教给你1种保护系统安全的好方法,一起来看看!电脑出现“清理请勿关闭计算机”在Windows 7(SP1)和Windows Server 2008 R2 SP1中,添加了1个新功能在“磁…...
2022/11/19 21:17:03 - 请勿关闭计算机还原更改要多久,电脑显示:配置windows更新失败,正在还原更改,请勿关闭计算机怎么办...
许多用户在长期不使用电脑的时候,开启电脑发现电脑显示:配置windows更新失败,正在还原更改,请勿关闭计算机。。.这要怎么办呢?下面小编就带着大家一起看看吧!如果能够正常进入系统,建议您暂时移…...
2022/11/19 21:17:02 - 还原更改请勿关闭计算机 要多久,配置windows update失败 还原更改 请勿关闭计算机,电脑开机后一直显示以...
配置windows update失败 还原更改 请勿关闭计算机,电脑开机后一直显示以以下文字资料是由(历史新知网www.lishixinzhi.com)小编为大家搜集整理后发布的内容,让我们赶快一起来看一下吧!配置windows update失败 还原更改 请勿关闭计算机&#x…...
2022/11/19 21:17:01 - 电脑配置中请勿关闭计算机怎么办,准备配置windows请勿关闭计算机一直显示怎么办【图解】...
不知道大家有没有遇到过这样的一个问题,就是我们的win7系统在关机的时候,总是喜欢显示“准备配置windows,请勿关机”这样的一个页面,没有什么大碍,但是如果一直等着的话就要两个小时甚至更久都关不了机,非常…...
2022/11/19 21:17:00 - 正在准备配置请勿关闭计算机,正在准备配置windows请勿关闭计算机时间长了解决教程...
当电脑出现正在准备配置windows请勿关闭计算机时,一般是您正对windows进行升级,但是这个要是长时间没有反应,我们不能再傻等下去了。可能是电脑出了别的问题了,来看看教程的说法。正在准备配置windows请勿关闭计算机时间长了方法一…...
2022/11/19 21:16:59 - 配置失败还原请勿关闭计算机,配置Windows Update失败,还原更改请勿关闭计算机...
我们使用电脑的过程中有时会遇到这种情况,当我们打开电脑之后,发现一直停留在一个界面:“配置Windows Update失败,还原更改请勿关闭计算机”,等了许久还是无法进入系统。如果我们遇到此类问题应该如何解决呢࿰…...
2022/11/19 21:16:58 - 如何在iPhone上关闭“请勿打扰”
Apple’s “Do Not Disturb While Driving” is a potentially lifesaving iPhone feature, but it doesn’t always turn on automatically at the appropriate time. For example, you might be a passenger in a moving car, but your iPhone may think you’re the one dri…...
2022/11/19 21:16:57