基于点云的深度学习方法论文阅读
基于点云的深度学习方法论文阅读
1. PointASNL: Robust Point Clouds Processing using Nonlocal Neural Networks with Adaptive Sampling
基于自适应采样的非局部神经网络鲁棒点云处理
引用格式:Yan X, Zheng C, Li Z, et al. PointASNL: Robust Point Clouds Processing using Nonlocal Neural Networks with Adaptive Sampling[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 5589-5598.
本文的重点就是提出了SA和L-NL两个模块,提升了网络对点云噪声和异常点的鲁棒性,加强了对点云特征的学习能力。
(读完觉得本文的组织结构很清晰)
本文提出的PointASNL主要由两个通用模块组成:自适应采样(AS)模块和局部非局部(L-NL)模块。AS模块用于调整采样点的坐标和特征,而L-NL模块用于捕获采样点的邻域和长距离依赖性( long-range dependency)。
与二维图像的情况不同,传统的卷积运算无法直接对非结构化点云数据进行处理。因此,现有的方法大多采用采样的方法从原始点云中选取点进行局部特征学习。
现有的一些采样算法:
- 最远点采样 farthest point sampling (FPS)
作为最具代表性的一种,FPS基于欧几里得距离,是依赖任务并对异常值敏感的。 - 泊松圆盘采样 Poisson disk sampling (PDS)
PDS作为一种预先定义的均匀采样方法,也不能以数据驱动的方式解决FPS中面临的任务依赖和对异常值敏感的问题。 - Gumbel子集采样 Gumbel subset sampling (GSS)
GSS只对高维嵌入空间进行采样,忽略了点的空间分布。
此外,这些方法的共同关键问题是采样点仅限于原始点云的一个子集。因此,假设取了一个离群点,它将不可避免地影响后续操作。
为了克服上述问题,本文提出了一个可微的自适应采样(AS)模块,通过数据驱动的方式来调整初始采样点(例如FPS)的坐标。这种坐标调整有助于拟合固有的几何子流形,并在不受异常值影响的情况下,进一步移动到原始点云以外的点。因此,AS模块不仅有利于点特征学习,而且提高了模型对噪声的鲁棒性。
目前很多的工作都是考虑采样点周围的局部点组,然后构造基于图的学习或者定义卷积运算,然而,这种点局部单元只考虑相邻区域的局部信息的相互作用,然后通过层次结构获取全局上下文,这通常导致自底向上的特征学习。受到Non-local neural networks[3]的启发,本文提出了L-NL模块, 特别地,点非局部单元允许将采样点的响应计算为整个点云影响的加权和,而不是仅在有限的相邻范围内。利用学习到的long-dependency correlation,L-NL模块可以为稳健的点云处理提供更精确的信息。
以往相关工作:
特征学习方面:
- 基于体素的方法和基于投影的方法
考虑到早期的直接对点云进行体素化然后利用三维卷积进行特征学习的方法的内存消耗,在此基础上出现了很多考虑点云的稀疏性的改进方法,大大提高了计算效率,但是这种方法缺乏捕捉非局部几何特征的能力。 - 基于点的学习方法
代表性方法:PointNet、PointNet++、PointCNN、Point2Sequence、PointWEB等,这类方法大多是学习局部特征然后聚合为全局特征,或者学习全局特征但缺乏对局部信息的利用(怎么有种不可兼得的感觉,然后本文就提出了L-NL模块解决这个问题?)
对噪声和异常点的处理方面:
- 基于统计的方法
例如基于统计距离的,基于邻域内点的个数的等,这类方法需要复杂的参数调整或额外信息,并且依赖于特定物体或任务。 - 数据驱动的方法
很多基于数据驱动的方法的采样方法对噪声和异常值敏感。
SA模块
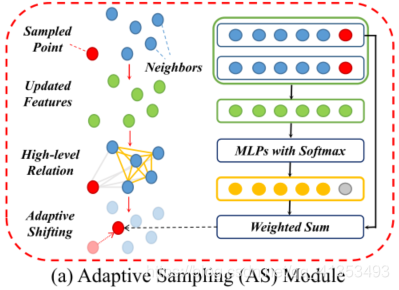
如图所示,该模块首先通过推理组内点关系更新分组点的特征,然后对初始采样点进行归一化加权,得到新的采样点。最后得到的新的采样点和特征是所有点和其特征的加权和,不一定是原始点云中的点。
N-NL模块

L-NL模块中,有两个单元:点局部(PL)单元和点非局部(PNL)单元。具体而言,PL单元可以是任何有吸引力的算法(例如PointNet++[25]、PointConv[44]),PNL单元创新性地考虑了采样点与整个点云之间的多尺度相关性。因此,通过结合局部和全局信息来增强点云的上下文学习。
具体地,PNL结构:
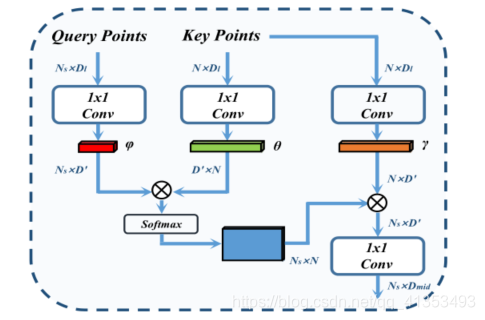
其中查询点即原始输入通过SA后生成的新的采样点,关键点即为输入点云的关键点(没有看到怎么得到的),点非局部单元就是得到每个查询点与全局关键点的关系信息。
2.A Graph-CNN for 3D Point Cloud Classification
图卷积神经网络
引用格式:Zhang Y, Rabbat M. A graph-cnn for 3d point cloud classification[C]//2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). IEEE, 2018: 6279-6283.
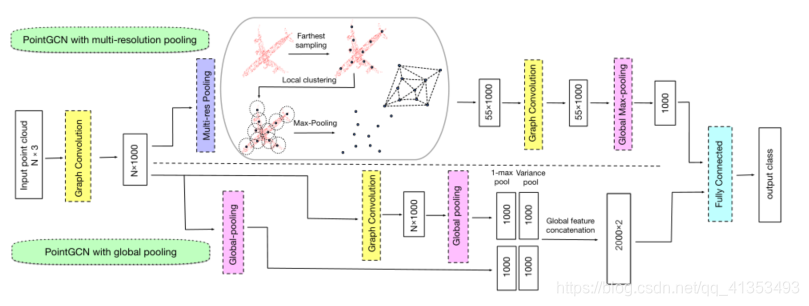
本文重点是将图卷积应用到点云中进行了目标识别任务,提出了两种池化层,分别是multi-resolution pooling和global pooling layer。这篇文章没有图卷积的基础知识会觉得看不懂,因为它的重点就是把图卷积应用到了点云中,其他的倒没什么太大的亮点。
图卷积的基础知识看这里
网络结构
3.Non-local neural networks
引用格式:Wang X, Girshick R, Gupta A, et al. Non-local neural networks[C]//Proceedings of the IEEE conference on computer vision and pattern recognition. 2018: 7794-7803.
受计算机视觉中经典的非局部均值方法的启发,本文提出了一种非局部操作作为一个通用的模块来捕获long-range dependency。这模块可以应用到许多计算机视觉体系结构中。[1]中的L-NL模块就是受此文启发。
非局部操作将一个位置的响应计算为输入特征映射中所有位置的特征的加权和。位置集可以是空间、时间或时空,这意味着非局部操作适用于图像、序列和视频问题。
non-local模块:

+xi表示残差模块,由上式可知,加入non-local模块直接在原来的基础上加入Wz*yi即可。
其中yi等于:
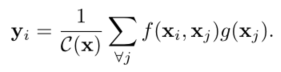
yi表示位置i的输出响应,f是用于计算位置i的输入与所有输入位置关系的函数,g是输入xi的响应函数。
g、f 的选择:
为简单起见,g就选择线性函数,W是学习的权重。

f 可以选择高斯函数:

对于学习到的嵌入可以采用嵌入高斯函数:


或者更简单的点积形式:

C(x)=N
4.3DSSD: Point-based 3D Single Stage Object Detector
引用格式:Yang Z, Sun Y, Liu S, et al. 3dssd: Point-based 3d single stage object detector[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 11040-11048.
本文提出了一种轻量级、高效的三维单阶段目标检测框架。
速度:每个场景38ms,25FPS
现有方法:
- 结合雷达数据、前视图、鸟瞰图(BEV),如MV3D、MMF等,融合多个传感器信息
- 仅使用激光雷达数据的三维目标检测主要有两种方法,一种是基于体素的,一种是基于点的。
三维目标检测像二维一样,根据对生成的候选区域是直接预测结果还是经过一个refine模块再预测结果划分为one-stage(single-stage)和two-stage方法。
对于two-stage方法:
它们以原始点云为输入,根据每个点预测边界框。具体来说,它们由两个阶段组成。在第一阶段,他们首先利用set abstract(SA)层进行下采样和提取上下文特征。然后,应用feature propogation(FP)层进行上采样并将特征广播(broadcasting)到下采样过程中丢弃的点。然后应用三维RPN网络(RPN)生成以每个点为中心的proposals。基于这些proposals,开发了一个refine模块作为第二阶段给出最终预测。这些方法虽然取得了较好的性能,但在许多实时系统中,它们的推理时间往往难以忍受(这一点与二维的相吻合)。
提出问题:
本文认为 FP层和refine模块耗了一半的推理时间,所以本文出发点是想去除这两个模块,但是FP层又是非常重要的,因为在当前SA的采样策略(基于3D欧几里得距离(D-FPS)的最远点采样)下,内部点较少的前景实例在采样后可能会丢失所有点。如果没有FP层,它们是不可能被检测到的,这导致了巨大的性能下降。
解决问题:
-
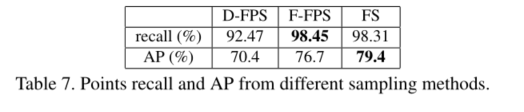
提出了新的基于特征距离的采样方法F-FPS(我发现对采样方法进行改进的文章也挺多的),它保留了不同实例的内部点,本文最终采用的采样方法是D-FPS与F-FPS的结合。
单独采用D-FPS当采样点不足时会丢失一部分正点(即前景点),而单独采用F-FPS虽然定位和回归精度提高了,但分类精度会低,因为无法采样足够的负点(即背景点),所以采用二者结合的方法。
-
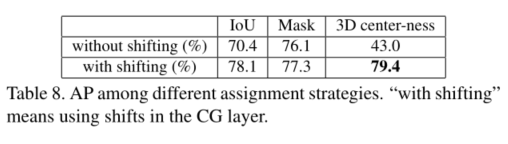
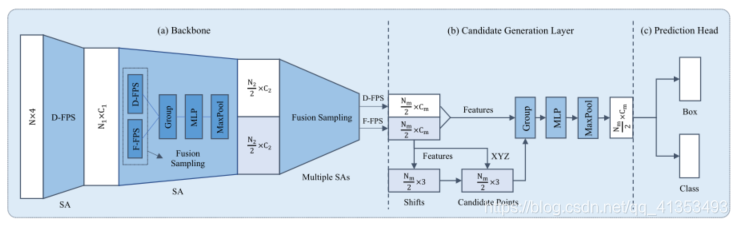
为了去掉refine模块就要在SA层后使用精心设计的边界框预测网络(包括 candidate generation layer (CG)、an anchor-free regression head、3D center-ness assignment strategy)。
-
CG层:首先移位F-FPS得到的代表点,生成候选点。这种移位操作是由这些代表点与其相应实例的中心之间的相对位置来监督的。(我理解的:相应实例的中心点从ground truth中得到,candidate点类似于二维中的锚点,这一步的操作旨在使生成的候选点的中心与真实中心更近)然后以这些候选点为中心,从F-FPS和D-FPS产生的代表点中找到其周围的点,然后通过层感知器(MLP)网络提取它们的特征
-
提取到的特征输入anchor-free regression head,预测三维边界框
-
3D center-ness assignment strategy 用于将更高的分类分数分配给更接近实例中心的候选点
3DSSD架构:
评估数据集:
- KITTI
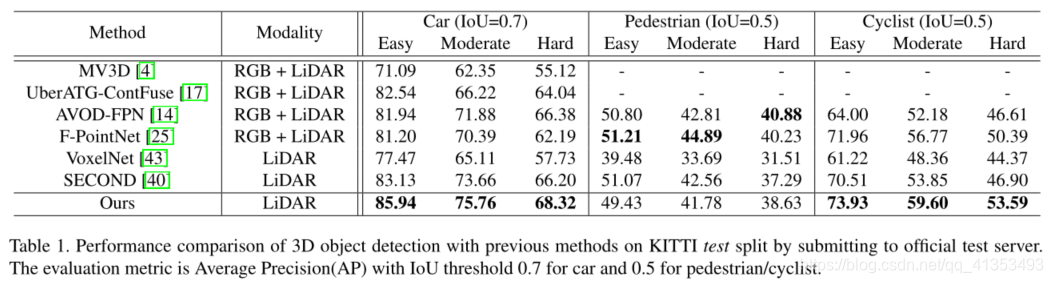
在KITTI数据集中,有7481个训练图像/点云和7518个测试图像/点云,包括汽车、行人和骑车人三类。
由于数据量大,场景复杂,本文只在car class上评估模型。而且,大多数最先进的方法只在这个类上测试模型。我们使用平均精度(AP)来比较不同的方法。在评估过程中,我们遵循官方的KITTI评估协议-即,对于class car,IoU阈值为0.7。
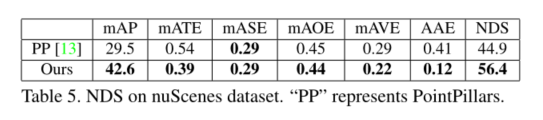
- nuScenes
nuScenes数据集是一个更具挑战性的数据集。它包含1000个场景,收集自波士顿和新加坡,由于它们的交通拥挤和极具挑战性的驾驶环境。它为我们提供了10个不同类别的1.4米三维物体,以及它们的属性和速度。每帧大约有40k个点,为了预测速度和属性,以前的方法都是将最近0.5s内的关键帧和帧的点合并,得到大约400k个点。面对如此大量的点,由于GPU内存的限制,所有基于点的两阶段方法都比基于体素的方法性能差。
此数据集使用一种新的评价指标NDS(nuScenes detection score ),mean average precision (mAP,平均平均精度), the mean average errors of location (mATE,位置平均误差,这个地方写错了吧,应该是mALE吧), size (mASE,属性平均误差), orientation(mAOE,方位平均误差), attribute (mAAE,属性平均误差) and velocity (mAVE,速度平均误差)的加权和。


5.3D point capsule networks
引用格式:Zhao Y, Birdal T, Deng H, et al. 3D point capsule networks[C]//Proceedings of the IEEE conference on computer vision and pattern recognition. 2019: 1009-1018.
(Submitted 16 May, 2019; v1 submitted 11 December, 2018; originally announced December 2018.)
代码:https://tinyurl.com/yxq2tmv3
本文提出了 3D point capsule networks,一个灵活有效的三维形状处理和理解工具,该算法可以用在三维重建、局部特征提取和零件分割等任务中,也能够解决新的任务,如部分插值和替换。
理解这篇文章需要很多的储备知识,没有仔细看。主要了解了一下capsule network,简单capsule network是不同于CNN的,它提取的不是单一的特征向量,而是一个包含多个神经元的载体,每个神经元表示了图像中出现的特定实体的各种属性。(是不是可以理解为多个特征向量呢?),类似于生活中提到的胶囊。
关于capsule network 看这里
6.PointRCNN:3D Object Proposal Generation and Detection from Point Cloud
引用格式:Shi S, Wang X, Li H. Pointrcnn: 3d object proposal generation and detection from point cloud[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2019: 770-779.
(Submitted 11 July, 2019; v1 submitted 27 December, 2018; originally announced December 2018.)
代码:https://github.com/sshaoshuai/PointRCNN
本文是two-stage 三维目标检测算法。第一阶段任务是生成很多预选3D框(文章称之为3D Proposal)。第二阶段是在预选3D框的基础上,获得更加精细的3D框。
PointRCNN整体流程:
- 首先将原始点云输入第一阶段,进行编码和解码操作,这里采用的是pointnet++网络,得到Point-wise 的特征向量(point-wise即基于每个点的,也就是每个点都有一个特征向量),然后对点云进行了前景点分割(Foreground Point Segementation)再然后以分割出的每个前景点为中心得到3D proposal box。其中,边界框(x,y,z,h,w,l,theta)的回归损失采用bin-based loss。(基于bin(暂译为区间)的三维边界框回归误差:看这里,重点理解 bin-based loss 是如何将回归问题转换为分类问题和residual loss的。)
- 将第一阶段得到的每个点的语义特征,前景mask(我理解为每个点是前景的confidence)和3D proposals传递到第二个阶段,第二个阶段对每个3D proposal box 进行坐标规范化,然后提取每个proposal的局部特征,将局部特征与语义特征连接起来最后输入一个mlp进行边界框回归和分数预测。
本文的网络结构:
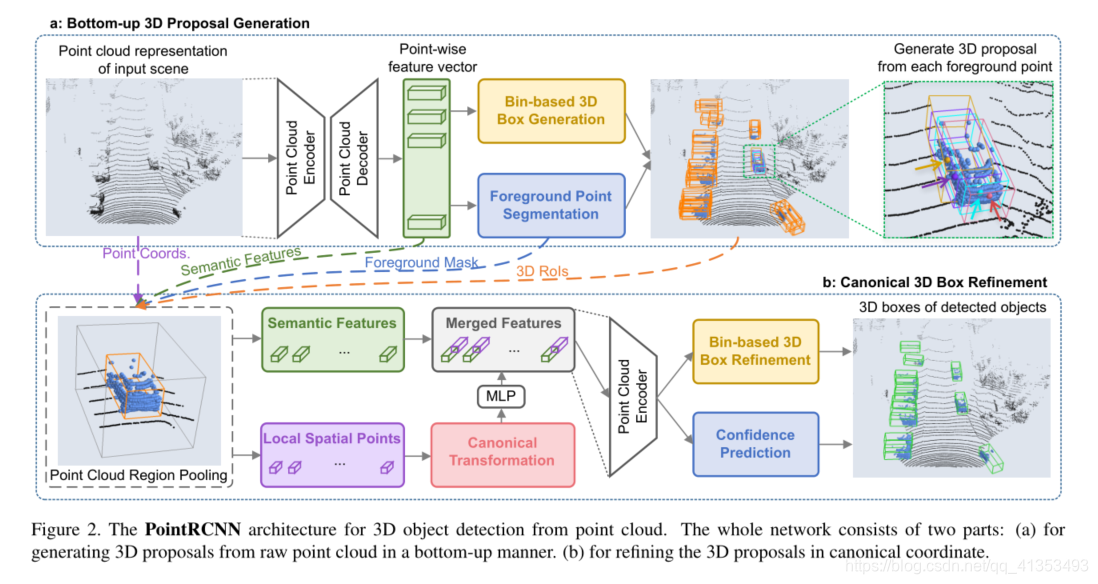
Botton-up 3D proposal generation 自底向上的3D预选目标框的生成
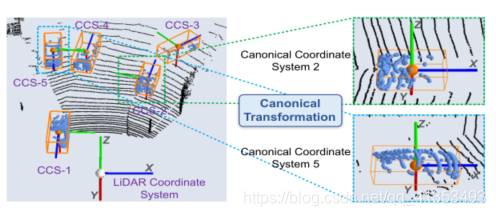
Canonical 3D Box Refinement 标准3D目标框的精细优化
第二阶段将第一阶段得到的候选区域的前景点坐标转换为规范坐标,文中的意思即原点位于box proposal的中心,局部x和z轴大致平行于地平面,x指向建议的头部方向,另一个z0轴垂直于X0;y轴与雷达坐标系中的y轴保持一致。此操作可以使box细化阶段更好地了解每个方案的局部空间特征。
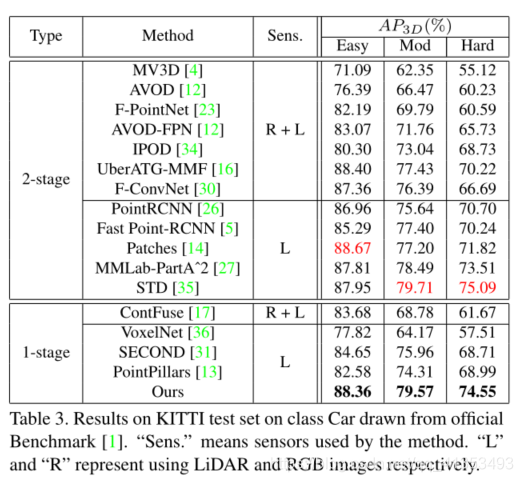
评估数据集:KITTI
消融实验
-
第二阶段采用两种特征连接起来的操作的有效性
实际上第二阶段还融合了物体与雷达传感器的距离信息

和segementation mask信息,下表也证明了这两个信息的有效性。
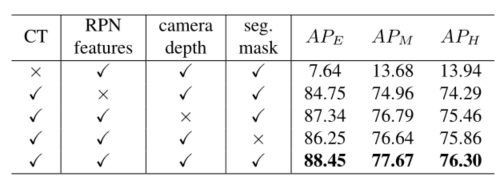
其中CT表示canonical transformation。RPN feature则是第一阶段得到的特征。AP代表平均精度,E、M、H表示easy、middle、hard。 -
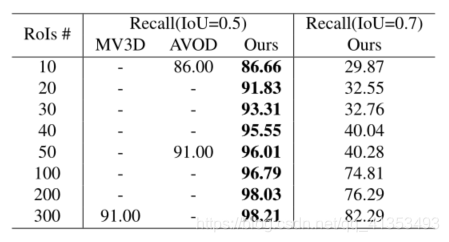
下表是使用本文提出的3D proposal generation方法的有效性。可以发现使用此方法可以保持不错的召回率。
- bin-based loss的有效性
residual-based loss (RB-loss) 、residual-cos-based loss(RCB-loss)、corner loss (CN-loss) 、partial-bin-based loss (PBB-loss)、bin-based loss (BB-loss)

7.Structure Aware Single-stage 3D Object Detection from Point Cloud
引用格式:He C, Zeng H, Huang J, et al. Structure Aware Single-stage 3D Object Detection from Point Cloud[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 11873-11882.
代码:https://github.com/skyhehe123/SA-SSD
本文提出了一种单阶段的三维目标检测器——SA-SSD(Structure Aware),常见的单阶段目标检测器通过卷积的方式一步步提取特征,缩小后的特征不可避免地会丢失空间信息,不能充分利用三维点云的结构信息,降低了定位精度。本文提出的SA-SSD通过加入辅助网络,将主干网络中的特征转换为point-level表示,并通过两个辅助任务进行联合优化,从而促进主干网络学习更有分辨力的特征。另外对于置信度与边界框不一致的问题,提出了PSwarp( part-sensitive warping)模块。最终在KITTI数据集上去取得不错的精度和时间效率。
问题背景:基于点云数据的三维目标检测是自动车辆系统(AV,Autonomous V ehicle)中的一个重要组成部分。与普通的二维目标检测仅从图像平面估计二维边界框不同,AV需要从真实世界中估计出一个信息更丰富的三维边界框,以完成路径规划和碰撞避免等高级任务。
提出问题:
现有的三维目标检测方法可以分为:单阶段方法和两阶段方法
- 单阶段方法
单阶段方法将稀疏的三维点云解析为一个紧凑的表示,如体素网格或鸟瞰图(BEV)图像,并使用CNN以完全卷积的方式直接预测边界框。这使得单阶段方法通常简单有效。逐步缩小的特征图不可避免地会失去空间分辨率,不能明确地考虑点云数据的结构信息,使得单级检测器处理稀疏点云的精度降低。当目标包含的点不足时,单级探测器无法实现精确定位。

上图是2D点集检测对象的常规示例。如图(a)所示,只检测到来自对象的几个点,并且有一些背景点靠近其边界。这种情况在真实场景中非常常见,在真实场景中,物体远离传感器,被其他不感兴趣的物体遮挡。随着CNN逐渐降低点云的空间分辨率,一些目标点可能淹没在背景点中,导致对象边界处的特征在低分辨率特征空间中被错误分类,如图(b)所示。因此,该模型被误导并生成低质量的边界框。 - 两阶段方法
对每个点进行操作并为每个感兴趣区域重新提取特征大大增加了计算成本,使得两阶段方法很难达到实时速度。
解决方法:
- 整体网络结构

-
主干网络和检测网络
主干网络采用三维卷积,不同于体素化的预处理方法,本文直接将每个点表示为输入张量的非零项,方法是将点的坐标量化为张量索引。(不懂标准的体素化方法为什么这么麻烦,为什么不是像本文这样直接计算索引就好了???)经实验证明,本文这种将不规则无序点云转换为规则点云的方法时间效率更高。

对输入张量进行卷积,将提取到的特征输入检测网络,然后沿深度维度的特征向量串联成一个通道,将特征映射从主干输出到BEV表示,然后进行传统的二维CNN卷积。 -
针对逐步缩小的特征图不可避免地会失去空间分辨率,进而导致单阶段方法不能明确考虑点云数据的结构信息的问题,提出将主干网络特征图进行上采样,插值操作得到点级的特征图,对这些特征图进行两个辅助任务,分别是前景分割和目标中心点提取,然后与主干网络联合优化,这样主干网络虽然在下采样的过程中失去了一部分空间分辨率,也能学习到对结构敏感的特征。并且辅助网络只在训练阶段使用,推理时被移除,所以不会增加时间消耗。
-
针对预测的边界框与相应的置信图之间有偏差的问题,提出了一种局部敏感的warping操作PSWarp( PSRoIAlign的变体),如下图所示。首先修改最后的分类层来生成K部分敏感的分类图,例如,使用{upper left,upper right,bottom left,bottom right},K=4。同时,将每个特征映射位置的预测边界框划分为K个子窗口,并选取每个子窗口的中心位置作为采样点,这样,就可以生成K个采样网格,每一个都与一个分类图相关联,最后用K个样本分类图的平均值计算最终的置信图C。

消融实验证明各个模块的有效性:

-
损失函数设计

总的损失函数等于分类损失(focal loss)+回归损失(smooth L1损失)+两个辅助任务的损失。
超参数通过实验选择。

结果评估:
- 数据集
KITTI :数据集包含7481个训练样本和7518个测试样本。进一步将训练数据分成3712个样本的训练集和3769个样本的验证集。对最常用的汽车类别进行了实验。基准测试考虑了三个级别的困难:简单、中等和困难(基于对象大小、遮挡状态和截断级别)。 - 评价指标
使用(IoU)阈值为0.7的平均精度(AP)作为评价指标。 - 结果

8.Point-GNN: Graph Neural Network for 3D Object Detection in a Point Cloud
引用格式:Shi W, Rajkumar R. Point-gnn: Graph neural network for 3d object detection in a point cloud[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 1711-1719.
代码:https://github.com/WeijingShi/Point-GNN
本文提出了一种基于图卷积神经网络的目标检测方法,Point-GNN。为了减小平移带来的变化,引入了一种自动配准根据特征对齐坐标,为了减轻分类分数与边界框不匹配的问题,提出了合并边界框的策略,主要创新是以上两点,针对图卷积并没有精心的设计,属于one-stage的检测方法。
问题背景:机器人、自动驾驶等
提出问题:

三种点云的表示方法及处理方法,每种方法都有其优缺点。
- Grids 容易造成信息丢失和空间浪费
- 直接处理点云,分组采样的方法在大型点云上重复分组和采样可能会导致计算开销,以及使用MLP+maxpooling会没有充分考虑点之间的连通性和相邻点的上下文,可能会导致细节丢失。
- 图卷积依赖于K-最近邻(KNN)算法,该算法对点云密度很敏感。
- 本文之前很少有工作将图卷积神经网络用于目标检测。
解决方法:
- 整体结构

- graph construction 构建图
构建图就是常见的固定半径搜素临近点的问题

其中pi(xi,si),xi为坐标,si为其他特征,如雷达反射强度等。
当原始点云数量很多时,先进行体素下采样以减少计算负担。为了保留原始点云中的信息,本文将密集点云编码为顶点的初始状态值si。更具体地说,搜索每个顶点半径范围内的原始点,并使用集合上的神经网络来提取它们的特征。用M LP嵌入激光雷达的反射强度和相对坐标,然后用max函数进行聚合。 - a GNN of T iterations T次迭代GNN(带有自动配准模块)
典型的图卷积网络迭代过程:
首先利用函数ft(.)计算两个顶点之间的边特征,ρ(.)是一个集合函数,它聚集了每个顶点的边缘特征,gt(.)使用聚集的边缘特征来更新顶点特征,然后,图神经网络输出顶点特征或在下一次迭代中重复该过程。

带有自动配准模块的边缘特征迭代更新的过程:
在目标检测的情况下,设计用GNN来细化顶点的状态,以包含顶点所属对象的信息。为了达到这个目标,重写上述方程,用它的邻域状态来优化一个顶点的状态。

使用邻域的相对坐标作为ft(.)的输入进行边缘特征提取。相对于点云的全局移动,相对坐标具有平移不变性。然而,对于邻域的平移仍是敏感的,当一个小的平移被添加到一个顶点时,它的邻域的局部结构保持相似。但是邻域的相对坐标都发生了变化,使得输入方差增加到ft(.)。为了减少平移方差,提出用邻域的结构特征代替中心点坐标来对齐相邻点的坐标。由于中心顶点已经包含了先前迭代的一些结构特征,因此可以利用它来预测对准偏移,并提出一种自动配准机制:


-
每个迭代t使用不同的MLPt集合,在迭代之间不共享。对图神经网络进行T次迭代后,利用顶点状态值来预测顶点所属对象的类别和边界框。分类分支MLPcls计算多类概率。最后,本地化分支MLPloc为每个类计算一个边界框。
迭代次数选择(本文选T=3):

-
损失函数
分类损失:平均交叉熵损失

其中,
边界框回归损失:Huber 损失
边界框回归7个量(x,y,z,l,w,h.theta),theta是偏航角,与顶点(xv,yv,zv)关联起来有:


Huber损失:

总损失函数(为避免过拟合,在每个MLP中加入L1正则化):

-
bounding box merging and scoring 边界框合并与打分
由于多个顶点可以位于同一目标上,因此神经网络可以输出同一目标的多个边界框。有必要将这些边界框合并为一个,并指定一个置信分数。通常用非最大抑制(NMS),做法是选择分类分数最高的框,并抑制其他重叠的框。然而,分类分数不一定能反映定位质量。值得注意的是,一个部分被遮挡的物体可以有一个很强的线索来指示物体的类型,但是缺少足够的形状信息。标准NMS只根据分类分数会选择一个不精确的边界框。
算法,绿色为修改部分
遮挡因子:


消融实验:

结果评估:
- 数据集
KITTI - 评价指标
AP - 结果


9.PointAugment: an Auto-Augmentation Framework for Point Cloud Classification
引用格式:Li R, Li X, Heng P A, et al. PointAugment: an Auto-Augmentation Framework for Point Cloud Classification[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 6378-6387.
代码: https://github.com/liruihui/PointAugment
本文提出了一种新的自动增广框架PointAugment,它在训练分类网络时自动优化和扩充点云样本,以丰富数据的多样性。所提出的方法可以应用在已有网络中提升性能。核心思想与GAN一样,比较特别的可能在于Augmentor的损失函数设计。(到目前为止,还没有发现有任何研究利用三维点云自动增强来实现网络学习最大化)

问题背景:
近年来,很多研究聚焦于开发用于三维点云处理的深度神经网络。可靠地训练网络通常依赖于数据的可用性和多样性。然而,与ImageNet和MS-COCO数据集等二维图像基准测试不同,3D数据集的数量通常要小得多,标签数量相对较少,多样性有限。例如,ModelNet40是3D点云分类最常用的基准之一,它只有40个类别的12311个模型。有限的数据量和多样性会导致过拟合问题,进而影响网络的泛化能力。
提出问题:
- 现有的深度三维点云处理方法将网络训练和数据采集视为两个独立的阶段,没有联合优化,例如反馈训练结果以增强DA(data augmentation)。因此,训练后的网络可能是次优的。
- 现有的方法对所有输入点云样本应用相同的固定增强过程,包括旋转、缩放和/或抖动。在增广过程中忽略了样本的形状复杂度,例如,球体无论如何旋转都保持不变,但复杂形状可能需要更大的旋转。因此,传统的DA对于增加训练样本可能是多余的或不充分的。
解决问题:
-
基本思想:PointAugment通过一种对抗性学习策略,将增广网络(augmentor)与分类网络(classifier)进行端到端的训练,从而与网络训练共同优化增广过程。通过将分类器损失作为反馈,增量器可以学习通过扩大类内数据变化来丰富输入样本,而分类器则可以通过提取不敏感特征来学习对抗这一问题。得益于这种对抗性学习,增量器可以学习在训练的不同阶段生成最适合分类器的增广样本,从而最大限度地提高分类器的能力。(类似于GAN,只是重点在得到性能更好的D)

- 与学习为所有训练样本寻找固定的扩充策略的方法不同,PointAugment是样本感知的,即在训练过程中,根据单个训练样本的性质和网络能力动态地生成转换函数。
- 与利用GAN进行数据增强不同的地方是,PointAugment通过一个明确设计的边界来扩大增广后的点云与原始点云之间的损失,动态调整增广样本的难度,使增广样本能更好地适应不同训练阶段的分类器
-
Augmentor


- Per-point feature extraction:ML
- Shape-wise regression
M是三维空间中的线性矩阵,主要结合了旋转和缩放
为了回归M,基于高斯分布生成一个C维噪声向量,并将其与G相连,然后使用MLPs来获得M。注意,噪声向量使 Augmentor能够通过引入回归过程中的随机性来探索回归变换矩阵时的更多样化选择。 - Point-wise regression
学到的D给出了点级的平移和抖动
为了回归D,我们将N个G和F还有一个N×C噪声矩阵连接起来,其值是基于高斯分布随机独立生成的。最后,我们使用MLPs来获得D。

-
Classifier

分类器的选择是灵活的。 -
损失函数
-
Augmentor loss
为了使网络学习最大化,增量器产生的增广样本P’应满足两个要求:(i)Pi应比P更具挑战性,即P‘的分类损失应该大于P(ii)P’应该具有独特的形状即不能偏离P。

其中,L(P )和L(P’)表示P和P‘的分类交叉熵损失。
为满足(i)要最小化LA,理想情况下

但如果只要求(i),此时输出的P‘可能与P完全无关。

所以进一步限制了增大幅度ξ。


在早期训练过程中,分类器比较脆弱,所以ξo不应该太大,当分类器变得更强大时,我们可以逐渐放大ξo,以使增量器产生更具挑战性的P’。
动态调整ρ:

最终:

其中λ是一个固定的超参数,用于控制每个项的相对重要性。一个小的λ鼓励增量器更多地关注分类,而对P的增加较少,本文选λ=1.

-
Classifier loss

γ=10.0,最后一项有助于显式地惩罚增强样本与原始样本之间的特征差异,以学习更加鲁棒的特征。
-
-
端到端的训练策略
与GAN好像没查差别啊

消融实验

结果评估:
本文在分类方法PointNet、PointNet++、RSCNN、DGCNN上证明了方法的有效性。
- 数据集
ModelNet10 、ModelNet40、SHREC16

- 评价指标
accuracy - 结果

- 评价指标
10.Associate-3Ddet: Perceptual-to-Conceptual Association for 3D Point Cloud Object Detection
引用格式:Du L, Ye X, Tan X, et al. Associate-3Ddet: Perceptual-to-Conceptual Association for 3D Point Cloud Object Detection[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 13329-13338.
代码:
本文旨在解决由于距离和遮挡造成的三维目标检测性能下降的问题。本文提出的方法学习将从真实场景中提取的特征(感知特征)与类概念模型中更具鉴别性的特征(概念特征)相关联,从而增强了特征的鲁棒性。这是一种仿生物学设计,当人看到一个被遮挡或者特征不完全的物体,通常是将眼睛看到的(感知特征)与已有知识(概念特征)结合起来对物体进行有效的识别。
提出问题:随着距激光雷达传感器距离的增加,点云的密度急剧下降,导致密度变化较大。此外,由于遮挡或低密度点云,物体的某些部分可能是不可见的。在这些情况下,由于缺乏紧凑的感知特征,3D检测结果容易出错。
解决问题:
-
网络结构如下图所示,有两个并行的分支,感知特征提取分支和概念特征。特别地,因为被遮挡或者远处的物体具有较少的特征可用于识别,为了使PFE生成类似于概念特征的特征表示,加入了可变形卷积模块,该网络可以自适应地调整相应的感受野,并且即使在稀疏的情况下也能够主动地捕捉更多信息量的上下文信息。

-
CFG算法首先在概念场景上进行端到端的单独训练,概念场景是从真实场景中派生出来的,并与完整的对象模型集成在一起。这里提出的概念模型可以是一个完整的点云,例如来自外部资源的三维CAD模型,或者来自同一数据集的具有更多信息知识的代理模型。在对CFG进行端到端的训练后,固定参数,为进一步的域自适应提供稳定的特征指导。在PFE的训练过程中,将真实场景及其对应的概念场景分别输入到PFE和CFG中。即使只有稀疏且部分可见的真实物体点云,PFE也被鼓励在概念模型的指导下学习更鲁棒的特征。在推理过程中,不再需要CFG。
-
提出的P2C学习将PFE产生的感知特征映射到CFG提取的概念特征,建立关联。(直接优化这两个特征之间的L2距离以进行域自适应,PFE的参数被调整为鼓励感知对象生成类似于更具信息量的概念特征),在推理阶段也不需要P2C模块。

结果评估:
数据集:KITTI

参考文献:
[1]Yan X, Zheng C, Li Z, et al. PointASNL: Robust Point Clouds Processing using Nonlocal Neural Networks with Adaptive Sampling[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 5589-5598.
[2]Zhang Y, Rabbat M. A graph-cnn for 3d point cloud classification[C]//2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). IEEE, 2018: 6279-6283.
[3]Wang X, Girshick R, Gupta A, et al. Non-local neural networks[C]//Proceedings of the IEEE conference on computer vision and pattern recognition. 2018: 7794-7803.
[4]Yang Z, Sun Y, Liu S, et al. 3dssd: Point-based 3d single stage object detector[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 11040-11048.
[5]Zhao Y, Birdal T, Deng H, et al. 3D point capsule networks[C]//Proceedings of the IEEE conference on computer vision and pattern recognition. 2019: 1009-1018.
[6]Shi S, Wang X, Li H. Pointrcnn: 3d object proposal generation and detection from point cloud[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2019: 770-779.
[7]He C, Zeng H, Huang J, et al. Structure Aware Single-stage 3D Object Detection from Point Cloud[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 11873-11882.
[8]Shi W, Rajkumar R. Point-gnn: Graph neural network for 3d object detection in a point cloud[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 1711-1719.
[9]Li R, Li X, Heng P A, et al. PointAugment: an Auto-Augmentation Framework for Point Cloud Classification[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 6378-6387.
[10]Du L, Ye X, Tan X, et al. Associate-3Ddet: Perceptual-to-Conceptual Association for 3D Point Cloud Object Detection[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 13329-13338.
如若内容造成侵权/违法违规/事实不符,请联系编程学习网邮箱:809451989@qq.com进行投诉反馈,一经查实,立即删除!
相关文章
- 三维点云补全
1.Multimodal Shape Completion via Conditional Generative Adversarial Networks 引用格式:Wu R, Chen X, Zhuang Y, et al. Multimodal Shape Completion via Conditional Generative Adversarial Networks[J]. arXiv preprint arXiv:2003.07717, 2020. 代码:https://gith…...
2024/4/15 4:27:20 - 利用 Python 爬取了 37483 条上海二手房信息,我得出的结论是?
作者:林小呆 编辑:JackTian公众号:杰哥的IT之旅,后台回复:「上海二手房数据」可获取本文完整数据本文数据来源于链家网,搜集时间为2020年7月23日。 本次项目使用Scrapy-Redis分布式爬取链家网数据,请自备代理ip。完整代码我已经放文末链接中,本文不再赘述爬虫细节,源码…...
2024/4/18 10:37:25 - 1.Keil5兼容C51以及Keil4项目
1.1 问题的由来: 问题1:学习51单片机阶段中,KEIL是最常用的免费的编译环境,目前KEIL已升到KEIL5版本了,这个版本是为ARM编程开发的,并不兼容C51。 问题2::在KEIL5打开低版本keil4项目时,有时会出现KEIL5卡死的情况的。 1.2 需要的安装包 需要的安装如下C51是KEIL为51开…...
2024/4/20 3:11:44 - 3D建模好学吗?
作者:小K大师 链接:https://www.zhihu.com/question/407265559/answer/1419551837 来源:知乎 著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。难学!真的很难!要是容易学我早就学会了!找软件,装软件我就花了大半个月找个教程到现在都没找到好的,…...
2024/4/11 20:24:18 - Reinforcement Learning - An Introduction强化学习读书笔记 Ch11.6-Ch11.10
11.6 贝尔曼误差是不可学习的 事实证明,很多在强化学习中感兴趣的量,即使有无限多的数据,也时不可学习的,这些良定义的量在给定环境的内在结构时可以计算,但是不能从外部可观测的特征向量、动作和收益的序列中得到。 事实上贝尔曼误差BE是不可学习的,考虑两个MRP:当两条边…...
2024/4/18 21:05:25 - Elasticsearch初级学习笔记
一、简介 Elasticsearch 是用Java语言开发的,是目前全文搜索引擎的首选。它可以快速地储存、搜索和分析海量数据。Elasticsearch 的底层是开源库 Lucene。Elasticsearch 是 Lucene 的封装,提供了 REST API 的操作接口。 Elasticsearch 的实现主要分为以下几个步骤:首先用户将…...
2024/4/10 11:44:33 - 工程和模块的关系以及继承和依赖的概念
工程和模块的区别: 工程不等于完整的项目,模块也不等于完整的项目,一个完整的项目看的是代码,代码完整,就可以说这是一个完整的项目 和此项目是工程和模块没有关系。工程天生只能使用自己内部资源,工程天生是独立的。后天可以和其他工程或模块建立关联关系。 模块天生不是…...
2024/4/10 11:44:32 - 履约
履约是一个过程,是一个有多个角色共同实施完成的一个过程。...
2024/4/12 16:56:05 - linux中查看端口状态以及是否被占用的相关操作指令(netstat、isof)
linux中查看端口状态linux中查看端口状态1、netstat1.1、查看服务器上服务和端口1.2、查看某个端口是否被占用2、lsof:进程打开文件的相关信息2.1、列出80端口目前打开的文件列表2.2、列出所有的网络连接2.3、查看进程打开了某个文件2.4、查看某个用户打开的所有文件参考 linu…...
2024/4/11 20:24:17 - 集合源码解析之ArrayList
集合源码解析之ArrayListArrayList是开发中最常使用到的集合,要想深入了解绕不过源码,本篇文章简单讲解其源码,领略ArrayList的风采...ps: 本文以openjdk8为主.概述ArrayList是一种可以动态操作的集合类,基于数组实现. ArrayList允许空值和重复元素,该类封装了一个动态再分配的…...
2024/4/11 20:24:16 - G2O
slam十四讲:g20代码运次错误 error: no matching function for call to ‘g2o::BlockSolver<g2o::BlockSolverTraits<3, 1> >::BlockSolver(g2o::BlockSolver<g2o::BlockSolverTraits<3, 1> >::LinearSolverType*&)’ Block* solver_ptr = new Bl…...
2024/4/11 20:24:15 - 【mysql】关于checkpoint机制
一、简介思考一下这个场景:如果重做日志可以无限地增大,同时缓冲池也足够大,那么是不需要将缓冲池中页的新版本刷新回磁盘。因为当发生宕机时,完全可以通过重做日志来恢复整个数据库系统中的数据到宕机发生的时刻。但是这需要两个前提条件:1、缓冲池可以缓存数据库中所有的…...
2024/4/11 6:52:32 - Python3 运算符(1)
Python3 运算符 什么是运算符? 本章节主要说明Python的运算符。举个简单的例子 4 +5 = 9 。 例子中,4 和 5 被称为操作数,"+" 称为运算符。 Python语言支持以下类型的运算符:算术运算符 比较(关系)运算符 赋值运算符 逻辑运算符 位运算符 成员运算符 身份运算符…...
2024/4/13 15:38:49 - 苹果cmsV10教程
苹果cmsV10新手教程 苹果CMS程序是一套采用PHP+MYSQL环境下运行的完善而强大的快速建站系统。 经过近多年的开发经验和技术积累,苹果CMS程序已逐步走向成熟,在易用性和功能上已经成为同行中的佼佼者。苹果cms官方资源:http://www.maccms.la/ 演示地址:http://mac.luoxian.x…...
2024/4/16 2:54:49 - C++ deque底层实现
deque容器的存储结构 和 vector 容器采用连续的线性空间不同,deque 容器存储数据的空间是由一段一段等长的连续空间构成,各段空间之间并不一定是连续的,可以位于在内存的不同区域。 为了管理这些连续空间,deque 容器用数组(数组名假设为 map)存储着各个连续空间的首地址。…...
2024/4/11 20:24:12 - (C#)System.Security.SecureString(表示应保密的文本)
(C#)System.Security.SecureString(表示应保密的文本)正常的String类型值,在脱离开作用域之后,其值在内存中并不会被立即销毁,这时如果有人恶意扫描你的内存,程序中所保存的机密信息就会暴露;于是就有了System.Security.SecureString,SecureString表示一个应保密的文本,它在初始…...
2024/4/11 20:24:10 - 如何稳定情绪,不断勇猛精进?
从今年3月份开始学习数据分析的相关技能,打算9月份秋招应聘数据分析/数据运营相关的岗位。到目前为止,我都是一边学习数据分析,一边搞论文准备毕业的状态。 每天按部就班做这两件事儿,尽管数据分析岗竞争很大,且我非统计学、数学、计算机等相关专业出身。回顾了一下我这段…...
2024/4/19 2:35:23 - 脚本写作
多个程序启动脚本 root@freescale ~$ cat /usr/FITCU/start.sh #!/bin/sh ##指定lib路径,可以指定多个 export LD_LIBRARY_PATH=/usr/FITCU/lib:/usr/FITCU/RTU_RS485/Protocol_library:$LD_LIBRARY_PATH cd /usr/FITCU/RTU_Main/ ./RTU_Main & sleep 1 ./xfcsdy_ui -qws …...
2024/4/15 11:22:52 - uniapp切换到tabBar页面不刷新问题
本人在修改头像的时候遇到的这个问题 用uni.switchTab()的时候又不刷新页面,发现可以使用uni.reLaunch()跳转 可是使用的时候依然不能刷新数据,修改完头像依然是原头像,要退出重新登录才会刷新数据,后来发现是本地缓存的头像url没有改变,还是原来的,然后就直接把上传成功…...
2024/4/11 20:24:07 - 申论系统课
第一节...
2024/4/11 20:24:06
最新文章
- 姑苏寻韵~庆开放原子开源大赛 OpenTiny 前端 Web 应用开发挑战赛路演圆满落幕。
春日已至,姑苏古城迎来了一场编程的盛宴——开放原子开源大赛OpenTiny前端Web应用开发挑战赛。历时三个月的激烈角逐,OpenTiny与众多开发者携手共赴这场智慧的较量。决赛路演于4月14日在苏州(太湖)产业软件园圆满落下帷幕~ 开放原…...
2024/4/20 17:41:14 - 梯度消失和梯度爆炸的一些处理方法
在这里是记录一下梯度消失或梯度爆炸的一些处理技巧。全当学习总结了如有错误还请留言,在此感激不尽。 权重和梯度的更新公式如下: w w − η ⋅ ∇ w w w - \eta \cdot \nabla w ww−η⋅∇w 个人通俗的理解梯度消失就是网络模型在反向求导的时候出…...
2024/3/20 10:50:27 - Mac brew 安装软件
Mac brew 安装软件 homebrew 速度慢 将brew 切换到国内镜像源 # 速度一般 # 步骤一 cd "$(brew --repo)" git remote set-url origin https://mirrors.tuna.tsinghua.edu.cn/git/homebrew/brew.git# 步骤二 cd "$(brew --repo)/Library/Taps/homebrew/homebr…...
2024/4/16 8:52:18 - 理解 Golang 变量在内存分配中的规则
为什么有些变量在堆中分配、有些却在栈中分配? 我们先看来栈和堆的特点: 简单总结就是: 栈:函数局部变量,小数据 堆:大的局部变量,函数内部产生逃逸的变量,动态分配的数据&#x…...
2024/4/17 14:47:05 - 416. 分割等和子集问题(动态规划)
题目 题解 class Solution:def canPartition(self, nums: List[int]) -> bool:# badcaseif not nums:return True# 不能被2整除if sum(nums) % 2 ! 0:return False# 状态定义:dp[i][j]表示当背包容量为j,用前i个物品是否正好可以将背包填满ÿ…...
2024/4/19 19:02:10 - 【Java】ExcelWriter自适应宽度工具类(支持中文)
工具类 import org.apache.poi.ss.usermodel.Cell; import org.apache.poi.ss.usermodel.CellType; import org.apache.poi.ss.usermodel.Row; import org.apache.poi.ss.usermodel.Sheet;/*** Excel工具类** author xiaoming* date 2023/11/17 10:40*/ public class ExcelUti…...
2024/4/20 15:00:23 - Spring cloud负载均衡@LoadBalanced LoadBalancerClient
LoadBalance vs Ribbon 由于Spring cloud2020之后移除了Ribbon,直接使用Spring Cloud LoadBalancer作为客户端负载均衡组件,我们讨论Spring负载均衡以Spring Cloud2020之后版本为主,学习Spring Cloud LoadBalance,暂不讨论Ribbon…...
2024/4/19 11:33:34 - TSINGSEE青犀AI智能分析+视频监控工业园区周界安全防范方案
一、背景需求分析 在工业产业园、化工园或生产制造园区中,周界防范意义重大,对园区的安全起到重要的作用。常规的安防方式是采用人员巡查,人力投入成本大而且效率低。周界一旦被破坏或入侵,会影响园区人员和资产安全,…...
2024/4/19 11:52:08 - VB.net WebBrowser网页元素抓取分析方法
在用WebBrowser编程实现网页操作自动化时,常要分析网页Html,例如网页在加载数据时,常会显示“系统处理中,请稍候..”,我们需要在数据加载完成后才能继续下一步操作,如何抓取这个信息的网页html元素变化&…...
2024/4/20 9:42:32 - 【Objective-C】Objective-C汇总
方法定义 参考:https://www.yiibai.com/objective_c/objective_c_functions.html Objective-C编程语言中方法定义的一般形式如下 - (return_type) method_name:( argumentType1 )argumentName1 joiningArgument2:( argumentType2 )argumentName2 ... joiningArgu…...
2024/4/20 7:01:14 - 【洛谷算法题】P5713-洛谷团队系统【入门2分支结构】
👨💻博客主页:花无缺 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅! 本文由 花无缺 原创 收录于专栏 【洛谷算法题】 文章目录 【洛谷算法题】P5713-洛谷团队系统【入门2分支结构】🌏题目描述🌏输入格…...
2024/4/19 11:52:49 - 【ES6.0】- 扩展运算符(...)
【ES6.0】- 扩展运算符... 文章目录 【ES6.0】- 扩展运算符...一、概述二、拷贝数组对象三、合并操作四、参数传递五、数组去重六、字符串转字符数组七、NodeList转数组八、解构变量九、打印日志十、总结 一、概述 **扩展运算符(...)**允许一个表达式在期望多个参数࿰…...
2024/4/19 18:52:15 - 摩根看好的前智能硬件头部品牌双11交易数据极度异常!——是模式创新还是饮鸩止渴?
文 | 螳螂观察 作者 | 李燃 双11狂欢已落下帷幕,各大品牌纷纷晒出优异的成绩单,摩根士丹利投资的智能硬件头部品牌凯迪仕也不例外。然而有爆料称,在自媒体平台发布霸榜各大榜单喜讯的凯迪仕智能锁,多个平台数据都表现出极度异常…...
2024/4/19 23:08:02 - Go语言常用命令详解(二)
文章目录 前言常用命令go bug示例参数说明 go doc示例参数说明 go env示例 go fix示例 go fmt示例 go generate示例 总结写在最后 前言 接着上一篇继续介绍Go语言的常用命令 常用命令 以下是一些常用的Go命令,这些命令可以帮助您在Go开发中进行编译、测试、运行和…...
2024/4/20 0:22:23 - 用欧拉路径判断图同构推出reverse合法性:1116T4
http://cplusoj.com/d/senior/p/SS231116D 假设我们要把 a a a 变成 b b b,我们在 a i a_i ai 和 a i 1 a_{i1} ai1 之间连边, b b b 同理,则 a a a 能变成 b b b 的充要条件是两图 A , B A,B A,B 同构。 必要性显然࿰…...
2024/4/19 23:04:54 - 【NGINX--1】基础知识
1、在 Debian/Ubuntu 上安装 NGINX 在 Debian 或 Ubuntu 机器上安装 NGINX 开源版。 更新已配置源的软件包信息,并安装一些有助于配置官方 NGINX 软件包仓库的软件包: apt-get update apt install -y curl gnupg2 ca-certificates lsb-release debian-…...
2024/4/20 1:12:38 - Hive默认分割符、存储格式与数据压缩
目录 1、Hive默认分割符2、Hive存储格式3、Hive数据压缩 1、Hive默认分割符 Hive创建表时指定的行受限(ROW FORMAT)配置标准HQL为: ... ROW FORMAT DELIMITED FIELDS TERMINATED BY \u0001 COLLECTION ITEMS TERMINATED BY , MAP KEYS TERMI…...
2024/4/19 3:53:57 - 【论文阅读】MAG:一种用于航天器遥测数据中有效异常检测的新方法
文章目录 摘要1 引言2 问题描述3 拟议框架4 所提出方法的细节A.数据预处理B.变量相关分析C.MAG模型D.异常分数 5 实验A.数据集和性能指标B.实验设置与平台C.结果和比较 6 结论 摘要 异常检测是保证航天器稳定性的关键。在航天器运行过程中,传感器和控制器产生大量周…...
2024/4/19 19:50:16 - --max-old-space-size=8192报错
vue项目运行时,如果经常运行慢,崩溃停止服务,报如下错误 FATAL ERROR: CALL_AND_RETRY_LAST Allocation failed - JavaScript heap out of memory 因为在 Node 中,通过JavaScript使用内存时只能使用部分内存(64位系统&…...
2024/4/20 1:43:00 - 基于深度学习的恶意软件检测
恶意软件是指恶意软件犯罪者用来感染个人计算机或整个组织的网络的软件。 它利用目标系统漏洞,例如可以被劫持的合法软件(例如浏览器或 Web 应用程序插件)中的错误。 恶意软件渗透可能会造成灾难性的后果,包括数据被盗、勒索或网…...
2024/4/20 13:55:02 - JS原型对象prototype
让我简单的为大家介绍一下原型对象prototype吧! 使用原型实现方法共享 1.构造函数通过原型分配的函数是所有对象所 共享的。 2.JavaScript 规定,每一个构造函数都有一个 prototype 属性,指向另一个对象,所以我们也称为原型对象…...
2024/4/19 23:35:17 - C++中只能有一个实例的单例类
C中只能有一个实例的单例类 前面讨论的 President 类很不错,但存在一个缺陷:无法禁止通过实例化多个对象来创建多名总统: President One, Two, Three; 由于复制构造函数是私有的,其中每个对象都是不可复制的,但您的目…...
2024/4/19 10:00:05 - python django 小程序图书借阅源码
开发工具: PyCharm,mysql5.7,微信开发者工具 技术说明: python django html 小程序 功能介绍: 用户端: 登录注册(含授权登录) 首页显示搜索图书,轮播图࿰…...
2024/4/20 6:45:17 - 电子学会C/C++编程等级考试2022年03月(一级)真题解析
C/C++等级考试(1~8级)全部真题・点这里 第1题:双精度浮点数的输入输出 输入一个双精度浮点数,保留8位小数,输出这个浮点数。 时间限制:1000 内存限制:65536输入 只有一行,一个双精度浮点数。输出 一行,保留8位小数的浮点数。样例输入 3.1415926535798932样例输出 3.1…...
2024/4/20 3:28:04 - 配置失败还原请勿关闭计算机,电脑开机屏幕上面显示,配置失败还原更改 请勿关闭计算机 开不了机 这个问题怎么办...
解析如下:1、长按电脑电源键直至关机,然后再按一次电源健重启电脑,按F8健进入安全模式2、安全模式下进入Windows系统桌面后,按住“winR”打开运行窗口,输入“services.msc”打开服务设置3、在服务界面,选中…...
2022/11/19 21:17:18 - 错误使用 reshape要执行 RESHAPE,请勿更改元素数目。
%读入6幅图像(每一幅图像的大小是564*564) f1 imread(WashingtonDC_Band1_564.tif); subplot(3,2,1),imshow(f1); f2 imread(WashingtonDC_Band2_564.tif); subplot(3,2,2),imshow(f2); f3 imread(WashingtonDC_Band3_564.tif); subplot(3,2,3),imsho…...
2022/11/19 21:17:16 - 配置 已完成 请勿关闭计算机,win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机...
win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机”问题的解决方法在win7系统关机时如果有升级系统的或者其他需要会直接进入一个 等待界面,在等待界面中我们需要等待操作结束才能关机,虽然这比较麻烦,但是对系统进行配置和升级…...
2022/11/19 21:17:15 - 台式电脑显示配置100%请勿关闭计算机,“准备配置windows 请勿关闭计算机”的解决方法...
有不少用户在重装Win7系统或更新系统后会遇到“准备配置windows,请勿关闭计算机”的提示,要过很久才能进入系统,有的用户甚至几个小时也无法进入,下面就教大家这个问题的解决方法。第一种方法:我们首先在左下角的“开始…...
2022/11/19 21:17:14 - win7 正在配置 请勿关闭计算机,怎么办Win7开机显示正在配置Windows Update请勿关机...
置信有很多用户都跟小编一样遇到过这样的问题,电脑时发现开机屏幕显现“正在配置Windows Update,请勿关机”(如下图所示),而且还需求等大约5分钟才干进入系统。这是怎样回事呢?一切都是正常操作的,为什么开时机呈现“正…...
2022/11/19 21:17:13 - 准备配置windows 请勿关闭计算机 蓝屏,Win7开机总是出现提示“配置Windows请勿关机”...
Win7系统开机启动时总是出现“配置Windows请勿关机”的提示,没过几秒后电脑自动重启,每次开机都这样无法进入系统,此时碰到这种现象的用户就可以使用以下5种方法解决问题。方法一:开机按下F8,在出现的Windows高级启动选…...
2022/11/19 21:17:12 - 准备windows请勿关闭计算机要多久,windows10系统提示正在准备windows请勿关闭计算机怎么办...
有不少windows10系统用户反映说碰到这样一个情况,就是电脑提示正在准备windows请勿关闭计算机,碰到这样的问题该怎么解决呢,现在小编就给大家分享一下windows10系统提示正在准备windows请勿关闭计算机的具体第一种方法:1、2、依次…...
2022/11/19 21:17:11 - 配置 已完成 请勿关闭计算机,win7系统关机提示“配置Windows Update已完成30%请勿关闭计算机”的解决方法...
今天和大家分享一下win7系统重装了Win7旗舰版系统后,每次关机的时候桌面上都会显示一个“配置Windows Update的界面,提示请勿关闭计算机”,每次停留好几分钟才能正常关机,导致什么情况引起的呢?出现配置Windows Update…...
2022/11/19 21:17:10 - 电脑桌面一直是清理请关闭计算机,windows7一直卡在清理 请勿关闭计算机-win7清理请勿关机,win7配置更新35%不动...
只能是等着,别无他法。说是卡着如果你看硬盘灯应该在读写。如果从 Win 10 无法正常回滚,只能是考虑备份数据后重装系统了。解决来方案一:管理员运行cmd:net stop WuAuServcd %windir%ren SoftwareDistribution SDoldnet start WuA…...
2022/11/19 21:17:09 - 计算机配置更新不起,电脑提示“配置Windows Update请勿关闭计算机”怎么办?
原标题:电脑提示“配置Windows Update请勿关闭计算机”怎么办?win7系统中在开机与关闭的时候总是显示“配置windows update请勿关闭计算机”相信有不少朋友都曾遇到过一次两次还能忍但经常遇到就叫人感到心烦了遇到这种问题怎么办呢?一般的方…...
2022/11/19 21:17:08 - 计算机正在配置无法关机,关机提示 windows7 正在配置windows 请勿关闭计算机 ,然后等了一晚上也没有关掉。现在电脑无法正常关机...
关机提示 windows7 正在配置windows 请勿关闭计算机 ,然后等了一晚上也没有关掉。现在电脑无法正常关机以下文字资料是由(历史新知网www.lishixinzhi.com)小编为大家搜集整理后发布的内容,让我们赶快一起来看一下吧!关机提示 windows7 正在配…...
2022/11/19 21:17:05 - 钉钉提示请勿通过开发者调试模式_钉钉请勿通过开发者调试模式是真的吗好不好用...
钉钉请勿通过开发者调试模式是真的吗好不好用 更新时间:2020-04-20 22:24:19 浏览次数:729次 区域: 南阳 > 卧龙 列举网提醒您:为保障您的权益,请不要提前支付任何费用! 虚拟位置外设器!!轨迹模拟&虚拟位置外设神器 专业用于:钉钉,外勤365,红圈通,企业微信和…...
2022/11/19 21:17:05 - 配置失败还原请勿关闭计算机怎么办,win7系统出现“配置windows update失败 还原更改 请勿关闭计算机”,长时间没反应,无法进入系统的解决方案...
前几天班里有位学生电脑(windows 7系统)出问题了,具体表现是开机时一直停留在“配置windows update失败 还原更改 请勿关闭计算机”这个界面,长时间没反应,无法进入系统。这个问题原来帮其他同学也解决过,网上搜了不少资料&#x…...
2022/11/19 21:17:04 - 一个电脑无法关闭计算机你应该怎么办,电脑显示“清理请勿关闭计算机”怎么办?...
本文为你提供了3个有效解决电脑显示“清理请勿关闭计算机”问题的方法,并在最后教给你1种保护系统安全的好方法,一起来看看!电脑出现“清理请勿关闭计算机”在Windows 7(SP1)和Windows Server 2008 R2 SP1中,添加了1个新功能在“磁…...
2022/11/19 21:17:03 - 请勿关闭计算机还原更改要多久,电脑显示:配置windows更新失败,正在还原更改,请勿关闭计算机怎么办...
许多用户在长期不使用电脑的时候,开启电脑发现电脑显示:配置windows更新失败,正在还原更改,请勿关闭计算机。。.这要怎么办呢?下面小编就带着大家一起看看吧!如果能够正常进入系统,建议您暂时移…...
2022/11/19 21:17:02 - 还原更改请勿关闭计算机 要多久,配置windows update失败 还原更改 请勿关闭计算机,电脑开机后一直显示以...
配置windows update失败 还原更改 请勿关闭计算机,电脑开机后一直显示以以下文字资料是由(历史新知网www.lishixinzhi.com)小编为大家搜集整理后发布的内容,让我们赶快一起来看一下吧!配置windows update失败 还原更改 请勿关闭计算机&#x…...
2022/11/19 21:17:01 - 电脑配置中请勿关闭计算机怎么办,准备配置windows请勿关闭计算机一直显示怎么办【图解】...
不知道大家有没有遇到过这样的一个问题,就是我们的win7系统在关机的时候,总是喜欢显示“准备配置windows,请勿关机”这样的一个页面,没有什么大碍,但是如果一直等着的话就要两个小时甚至更久都关不了机,非常…...
2022/11/19 21:17:00 - 正在准备配置请勿关闭计算机,正在准备配置windows请勿关闭计算机时间长了解决教程...
当电脑出现正在准备配置windows请勿关闭计算机时,一般是您正对windows进行升级,但是这个要是长时间没有反应,我们不能再傻等下去了。可能是电脑出了别的问题了,来看看教程的说法。正在准备配置windows请勿关闭计算机时间长了方法一…...
2022/11/19 21:16:59 - 配置失败还原请勿关闭计算机,配置Windows Update失败,还原更改请勿关闭计算机...
我们使用电脑的过程中有时会遇到这种情况,当我们打开电脑之后,发现一直停留在一个界面:“配置Windows Update失败,还原更改请勿关闭计算机”,等了许久还是无法进入系统。如果我们遇到此类问题应该如何解决呢࿰…...
2022/11/19 21:16:58 - 如何在iPhone上关闭“请勿打扰”
Apple’s “Do Not Disturb While Driving” is a potentially lifesaving iPhone feature, but it doesn’t always turn on automatically at the appropriate time. For example, you might be a passenger in a moving car, but your iPhone may think you’re the one dri…...
2022/11/19 21:16:57